基于人机仿真技术的炮手操作姿势多指标量化评估模型
2021-09-11赵祎乾吴天宇李亚军朱天陆
赵祎乾,吴天宇,顾 森,李亚军+,朱天陆
(1.南京理工大学 机械工程学院,江苏 南京 210094;2.河南机电职业学院 智能工程学院,河南 郑州 451100)
0 引言
火炮由火力、火控、运载3个子系统模块构成,其结构复杂且精密,作战中通常要求在短时间内精准地完成各项操作任务,由此给炮手施加了较重的体力和脑力负荷[1]。鉴于人—机操作的协调性对火炮整体作战效能影响较大,立足于工程实际,为实现火炮操作过程安全、可靠、高效、舒适,围绕炮手操作姿势与火炮操控设备进行评估具有重要意义。
国内外有关火炮操作人机工效评估领域的典型文献有:谈乐斌等[2]依托计算机仿真技术,提出一种火炮人机操控设备快速评价方法;易慎光等[3-4]针对某型车载速射迫击炮与某型加榴炮瞄准机手轮的多项设计要素展开研究;王华亭等[5]面向自行高炮乘员舱内车长镜、座椅、操控台、行军固定器等元件进行仿真评估,并提出改进措施;张世全等[6]探索了火炮瞄准过程中操控器位置、空间尺寸、操作力等方面的最优设计参数;汪汇川等[7-8]从文献综述视角梳理了舰炮人机设备关系的演变与优化过程,并围绕舰炮射击准备流程构建了基于直接操控的人机交互理论模型;邵婷等[9]从人—机设备匹配度视角,建立了舰炮瞄准操控台优化设计模型;王立红等[10]采用主成分分析法对舰炮武器的操作工效进行综合评估;赵祎乾等[11-12]采用人机仿真评估的方式探讨了车载炮瞄准机手轮安装轴线夹角对炮手操作姿势的影响,并运用仿真评估与综合评价相结合的思路,研究得出牵引加榴炮瞄准机手轮轮径、安装轴高差、握柄截面尺寸的最优设计;苏胜等[13]对车载自行火箭炮驾驶员、炮手操作中依次涉及的方向盘高度、操控面板倾斜角度进行评估和改良;顾辉等[14]为降低装填手操作疲劳度,优化了车载炮装填作业面的高度,并设计了辅助操作装置;BALASUBRAMANIAN[15]根据人体生物力学维度,面向火炮装填过程中的炮弹质量、装填角度及高度展开分析,由此明确弹药架位置的最优设计方案。
上述研究可归纳为4个层面:
(1)根据理论层的标准和数据,从宏观视角提出面向火炮人机操控设备的评价模型或设计知识,并指明改进方向,然而由于缺乏数据支撑,较难析出详细的设计策略。
(2)构建并参照指标体系对火炮操控设备进行综合评估,然而其准确性易受评估人员认知程度、评估标准、个人偏好之间的差异,以及评估信息表征的模糊性等主观因素的干扰。
(3)根据人体力学分析或生理测量实验评估炮手操作火炮设备过程中的行为,虽然相对客观可靠,但是评估中设备的实物样本制作难度大、成本高、周期过长。
(4)以人机仿真技术为牵引,仿真炮手操作行为与过程,并提取对应操作姿势进行评估,由姿势的合理性反映火炮操控设备设计的优劣。目前对炮手姿势的评估大多从单一指标维度展开,各指标之间相对独立、系统性较弱,评估结果具有一定局限性。
由于火炮操控设备打样成本高,针对炮手操作展开的生理测量实验需要大量人力、物力、经济支撑,可行性较低且评估周期长。本研究充分显示仿真技术在火炮等复杂装备评估中的优势,立足于肢体偏转、关节扭矩、肌肉负载等多指标维度,面向炮手操作姿势探索性地提出一种量化评估模型,旨在通过评估炮手操作姿势的合理性辨别火炮操控设备设计的优劣,为提取多组设备设计方案中的最优或优选方案提供依据,从而支撑后续设备的优化设计,以提升火炮的操作工效与作战效能。
1 炮手操作姿势评估模型的构建
1.1 仿真技术与软件
随着虚拟现实、图形图像学、计算机辅助工业设计技术的革新,将仿真技术与人机工程评估相融合的方法已经广泛应用于各个领域,该方法具有灵活、便捷、高效的特征。人机仿真软件包括Siemens Tecnomatix Jack, Delmia[16],Ramsis[17],ICIDO,Human CAD[18],Anybody[19],MakeReal 3D SoErgo, MADYMO[20]等。本文研究以成熟且兼容性较强的Siemens Tecnomatix Jack 8.01软件作为评估工具,该软件可创建数字化三维仿真环境,并植入如可视域与可达域分析、任务分析工具(Task Analysis Toolkit,TAT)、车辆分析工具OPT(occupant packaging toolkit)等多项人因分析技术[11],通过分析可输出精确的评估数据。
1.2 评估内容与方法
1.2.1 评估内容
评估逻辑包括构建数字化人体模型、创建评估对象与环境、设置操作行为仿真和评估节点3部分。构建数字化人体模型分为基础与高级2个模块,基础模块可构建代表性较强的P1,P5,P50,P95,P99人体模型,模型数据库包括美国、加拿大、中国、印度、德国、日本等权威的人群尺寸;高级模块则按照人体随机样本的数据建模[21]。评估对象的三维模型有导入或直接构建2种方式,导入端可与Unigraphics,SolidWorks,Pro/Engineer等三维建模软件对接,兼容格式包括.wrl,.stl,.igs等;导入模型后需转换坐标并约束位置,从而创建三维仿真环境。
评估中需在炮手人体与评估对象模型之间添加并设置约束条件,仿真炮手动态操作过程,该过程可拆解为若干连续动作序列的集合。另外,为降低工作量并保证结果的可靠性,需从连续的动作序列集合中精准捕获极限、典型的操作姿势。极限姿势涵盖肢体活动可达轨迹的临界状态或关节扭转角度的极限区间等;典型姿势一般对应连贯动作序列中的转折点,该节点下可输出肢体、关节扭转角度或肌肉负荷的关键数据。评估节点应根据极限与典型操作姿势合理设置,力求通过对各节点下姿势的评估,准确、客观地反映整个操作行为与操作过程。
1.2.2 评估指标
人机仿真软件Siemens Tecnomatix Jack 8.01中面向操作姿势的评估指标包括可达域分析[12]、下背部分析(Lower Back Analysis, LBA)[22]、静态强度预测(Static Strength Prediction, SSP)[23]、搬运受力分析[24]、Ovako工作姿势分析系统(Ovako Working posture Analysis System, OWAS)[25]、快速上肢评价(Rapid Upper Limb Assessment, RULA)[26]、人体受力分析[21]等,各项指标的评估原理、方法、侧重点和数据表征形式均存在差异。应用指标时,应提取操作任务,整合任务中操作行为与操作姿势的特征,由此科学地选择和运用相关的评估指标。
1.2.3 评估数据分析算法

(1)
(2)

(3)
(4)
式中n为序列中数据的项数。灰色关联贴近度
(5)
式中Q值越接近1,比较序列与正理想解的接近程度越高,即对应评估对象在该项指标下的评估结果越优,反之越差。
由于评估指标的多样性和差异性,评估对象在各项指标下的评估结果可能不一致,为探索对象在多指标下综合评估的优劣排序,采用灰色接近关联度算法[29],根据评估对象在多项指标下的灰色关联贴近度数据建立比较序列,以评估指标为单位提取灰色关联贴近度的最优数据,并建立参考序列,二者的接近程度
(6)
式中:S0为参考序列;Si为比较序列;|S0-Si|为序列S0与Si之间的接近程度;S0(k),Si(k)依次为序列S0与Si中的第k(k=1,2,…,n)项数据。
序列Si与S0的接近关联度
(7)
该值可以表征评估对象的综合评估结果。如果进一步将评估对象按优劣进行组类划分,则采用灰色关联聚类算法[30],组建对象评估结果的数据集并计算差异矩阵Es:
(8)
(9)
式中eij为ρij(x)相对于ρij(y)的差异系数。
由矩阵Es计算并转换为差异距离矩阵Ds:
(10)
dij=eji+eij。
(11)
将矩阵Ds计算并转换为相似矩阵Rg:
(12)
(13)
式中max(Ds)为矩阵Ds中的最大值。相似矩阵Rg反映了各组对象评估数据之间的亲疏关系,根据聚类数量的要求和计算规则,取实数λ∈[0,1],经筛选构成在λ水平上的聚类,从而实现按照优劣顺序对多组评估对象的组类划分。
1.3 评估模型
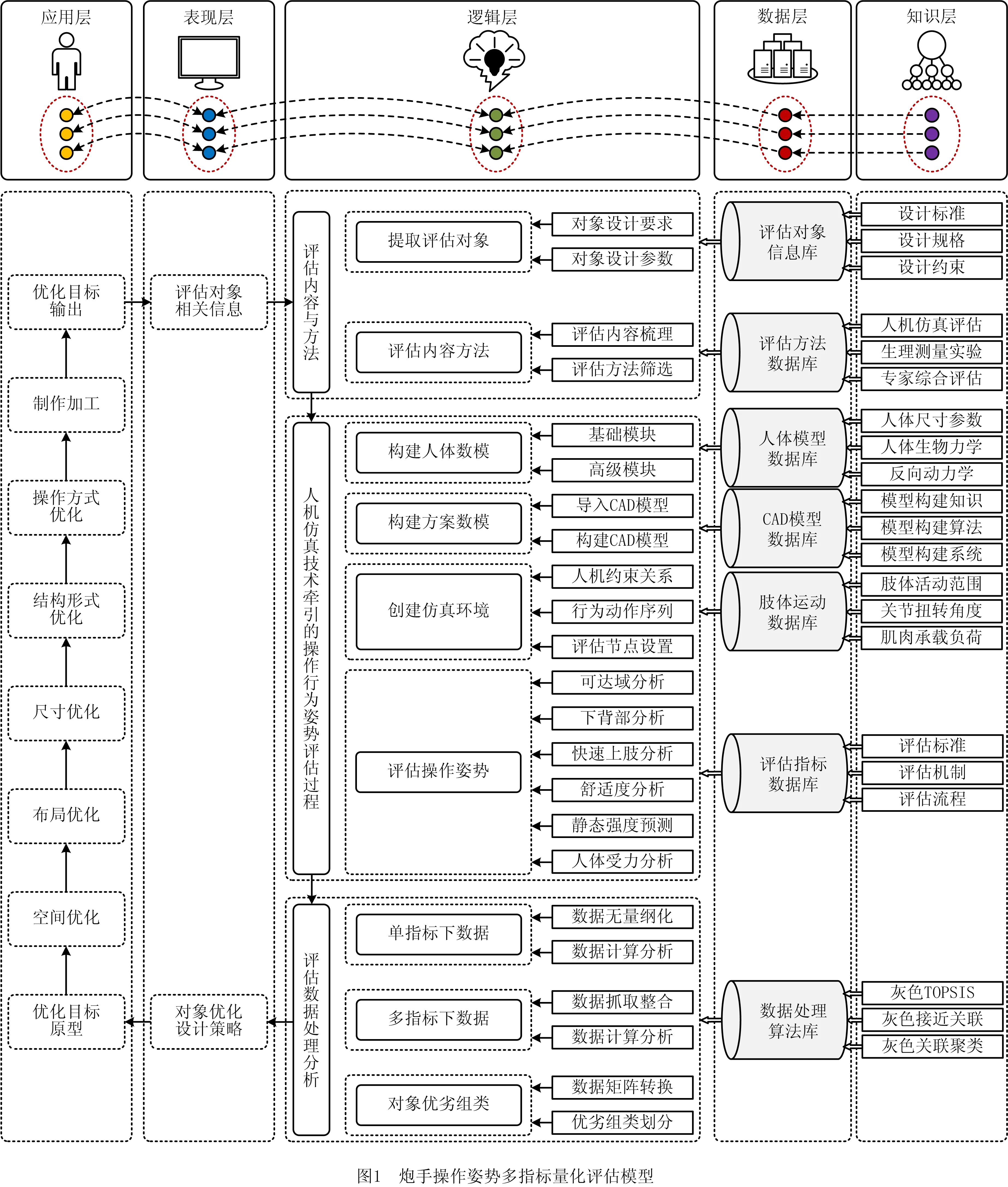
本文立足于仿真技术与评估逻辑,自上而下面向应用层、表现层、逻辑层、数据层、知识层构建了一种炮手操作姿势多指标量化评估模型,梳理了评估结果与人机操控设备设计之间的关系,如图1所示。模型的应用层是对评估结果相关知识的应用与表达,描述了由优化目标原型到优化对象输出的完整链路;表现层输入评估对象的信息,输出相应的优化设计策略;逻辑层集成了评估内容及方法、仿真评估过程、数据处理分析3个模块;数据层引入方法数据库、模型数据库、指标数据库等,为逻辑层提供数据和信息支持;知识层包括标准、原则、机制、算法等知识信息与表达方式。
本文面向模型逻辑层中的数据处理分析模块,依托对应算法开发了炮手操作姿势评估数据分析系统1.0(Data Analysis System for Gunner Operation Posture Evaluation,DASGOPE 1.0),系统开发环境为Windows 10,X64,开发语言为JAVA 1.8,采用JAVA Swing技术,该系统为仿真评估结果数据的主要分析工具。
评估模型的优势和先进性表现为:
(1)技术方面 将人机仿真技术与火炮操作中的人体姿势评估结合,以便设置评估中的多组比较对象并灵活调整对象参数,在保证研究可靠性的同时,力求解决武器装备人机工效评估中打样难、成本高、周期长、可行性较低等问题。
(2)评估指标方面 引入多项指标,全面、客观地针对炮手操作中躯干、肢体、关节、肌肉负载等多个维度展开评估,提出面向操作行为姿势的多指标量化评估方法路径,有效提升了评估的科学性与可信度。
(3)评估方法方面 炮手操作火炮设备时,基于对其姿势合理性的评估,辨别和区分火炮人机操控设备设计的优劣。
(4)评估数据处理方面 采用改进后的灰色关联贴近度算法、灰色接近关联度算法依次计算处理单项和多项指标下的评估数据,以解决多组对象因在各指标的评估结果排序不同,导致其在多指标下综合评估结果的优劣难以判断的问题,然后进一步结合灰色关联聚类算法,将评估对象划分到不同的优劣组类。本文综合3种算法开发了炮手操作姿势评估数据分析系统DASGOPE 1.0,实现了对评估数据的精确、高效处理和分析。
2 炮手操作姿势评估模型的应用与讨论
2.1 评估过程
以某型牵引榴弹炮瞄准机手轮操作姿势评估为例对模型的可用性进行探讨。在牵引式火炮瞄准中,炮手通过转动高低机和方向机手轮,对炮口高低角和方位角进行控制;作战中若要求短时间内对多个目标进行火力压制,则需要炮手根据射击诸元高频率、高强度地操作手轮,依次完成对各目标的瞄准任务,瞄准机手轮设备设计的合理性将直接影响炮手的操作姿势和工效。评估中需提取并建立多组瞄准机手轮设计方案,面向炮手操作各组方案所对应的行为姿势展开评估,通过评估结果判断设计方案的优劣,并指明最优或优选方案;评估前期需构建炮手与瞄准机手轮数字化模型。
炮手人体建模采用Siemens Tecnomatix Jack 8.01软件中的基础模块。前期研究表明,炮手操作时的站立点位距手轮较近,无论大尺寸P95炮手、平均尺寸P50炮手、还是小尺寸P5炮手,整个操作过程均处于炮手的上肢可达域内,由于炮手身体尺寸差异对评估结果的影响不显著,本文参照GJB2873-2002[31],选择普适性较强的平均尺寸P50男性士兵人体参数构建炮手数字化模型。
参照牵引榴弹炮瞄准机手轮的操作规范,炮手的右手和左手依次操作方向机与高低机手轮,操作力分别为49 N和69 N[1];两个手轮轮径一致,3种标准化的尺寸规格分别为200 mm,240 mm,280 mm;方向机手轮的安装位置相对固定且与高低机手轮轴线夹角为90°;回转轴高约950 mm;高低机手轮的回转轴高有950 mm,1 010 mm,1 050 mm,1 150 mm共4种规格。综合不同的轮径与高低机手轮回转轴高,共提出12组设计方案,如表1所示。

表1 12组瞄准机手轮设计方案对应的尺寸参数
由三维建模软件Unigraphics建立12组方案的数字化模型,导入仿真软件Siemens Tecnomatix Jack 8.01中并转换坐标,采用该软件的Animation模块对炮手操作各组方案的动态操作行为与操作过程进行仿真。为捕捉炮手极限与典型姿势,令操作中的高低机和方向机手轮同步,转动方向相反,并保证角速度和线速度均相同;参照手轮力依次设置炮手手部的操作力和力的方向;设定手轮转动频率为20圈/min,持续操作2 min;将各手轮握柄位于回转中心点的竖直正上方设置为初始位置(角度0°),顺时针转动角度为正、逆时针为负;以360°为周期等距划分并设置8个评估节点。例如,评估节点1对应的两个手轮均位于初始位置,其旋转角度均为0°,则评估节点2对应的高低机、方向机手轮旋转角度依次为-45°,45°,以此类推。
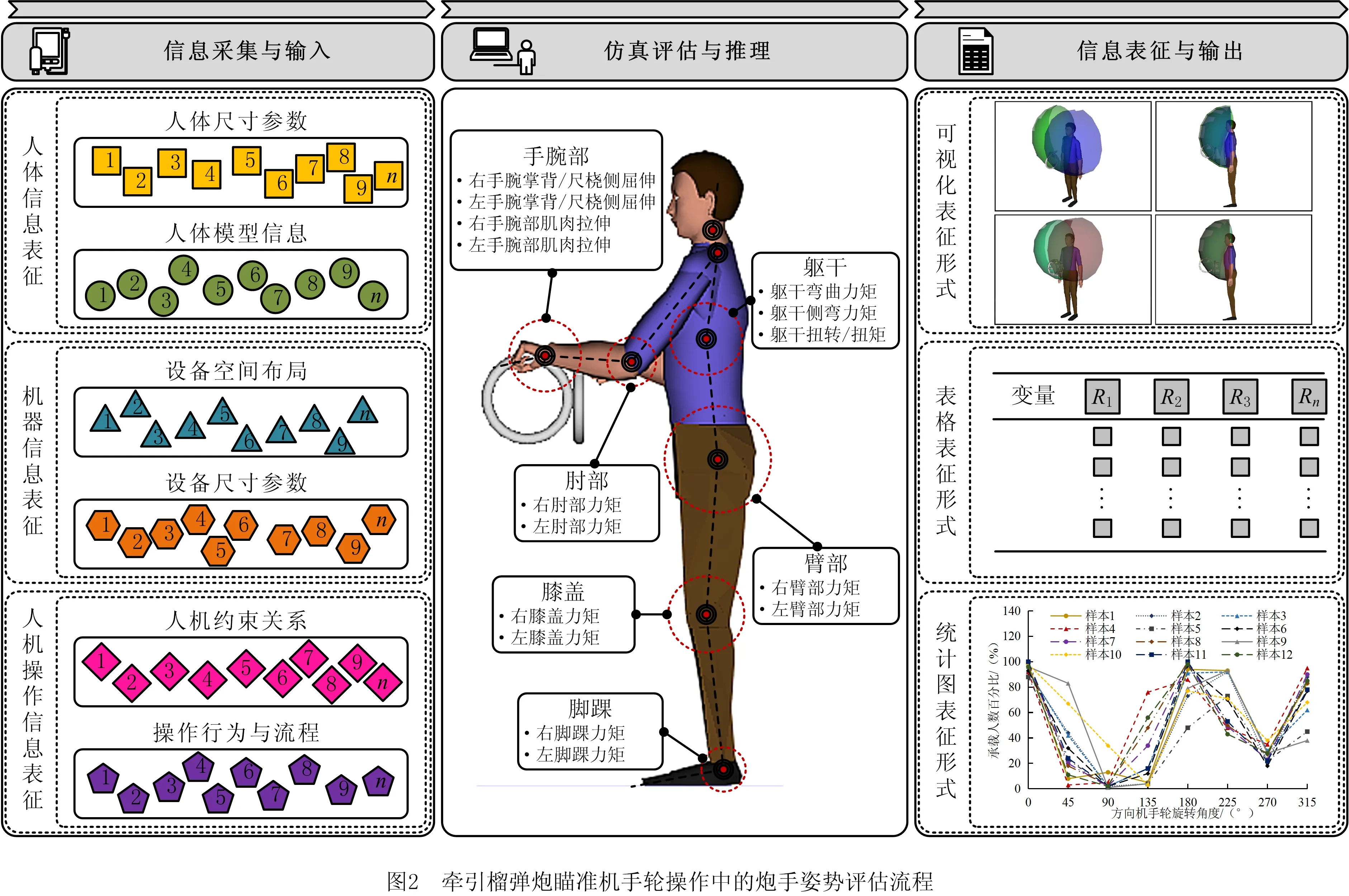
如图2所示,评估流程包括信息采集与输入、仿真评估与推理、信息表征与输出3个环节。其中输入环节包含人体信息表征(人体尺寸参数、人体模型信息)、机器信息表征(设备空间布局、设备尺寸参数)、人机操作信息表征(人机约束关系、操作行为与流程)。本部分围绕手轮操作过程,根据手腕部、肘部、躯干、臂部、膝盖、脚踝等多个部位的受力分析对各评估节点下炮手的操作姿势展开研究,并预测和判断该操作姿势下能完成任务的炮手人数在总人数中的占比,由该值对操作姿势的合理性进行表征。
仿真中引入右手腕和左手腕、右肘部和左肘部、躯干、臂部、膝盖、脚踝部位的承载力共8项细化评估指标。
2.2 各指标下的评估结果
抽取8项指标下12组方案在各评估节点(手轮旋转角度位置)对应炮手操作姿势的评估数据,如图3所示。结果表明,手腕、肘部、躯干、脚踝承载力指标下,各组方案对应评估数据的差异相对较大,臂部、膝盖承载力指标下的数据差异较小且评估结果整体较好。
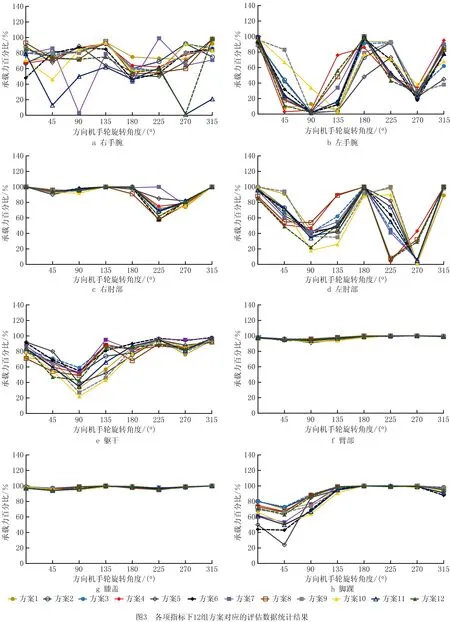
由图3a可知,方案7操作周期中方向机手轮旋转到90°位置,方案11操作周期中方向机手轮依次旋转到45°,270°,315°位置,方案12操作周期中方向机手轮旋转到270°位置,以上情况炮手右手腕承载力的评估结果过低,表明对应姿势下容易造成炮手右手腕部位的疲劳与损伤。
进一步探讨手轮操作中炮手右手腕承载力的变化规律及原因,统计各评估节点位置多组方案所对应数据的均值,依次为75.83%,68.83%,72.42%,84.83%,55.83%,62.92%,65.25%,81.25%。从评估节点2到节点4,即在方向机手轮由45°~135°的过程中,由于手轮力的大小和方向发生改变,右手腕部尺桡侧、掌背侧屈角度均逐步降低并在±15°范围之内,使右手腕的承载力提升约23.25%;从评估节点4到节点5,在方向机手轮由135°~180°的过程中,右手腕的承载力降低约34.19%;在方向机手轮手轮由180°~315°的过程中,右手腕的承载力提升约45.53%;在方向机手轮由315°顺时针再次转回到45°的过程中,右手腕的承载力降低约15.29%。
以此类推,根据图3b~图3h,在手轮操作过程中,依次针对炮手右肘部、左肘部、躯干、臂部、膝盖、脚踝部位承载力指标评估数据的特征、数据变化的规律和原因进行探讨。为对比单项指标下12组设计方案所对应的炮手操作姿势评估结果的优劣,用式(1)~式(5)计算各方案的评估值与最优参考值之间的灰色关联贴近度。在DASGOPE 1.0系统中的操作步骤如下:①选定评估指标,本次勾选“受力分析”;②参照12组方案建立对应的样本,并输入“样本数量”和“评估节点数量”,如图4a所示;③依次点选对应的评估部位,如图4b所示;④按照评估部位逐次录入各组方案的评估源数据,这里以右手腕承载力为例,如图4c所示。

对图4c中的源数据进行无量纲化,组建12组比较序列,以评估节点为单位提取最优和最劣参考序列,如表2所示。
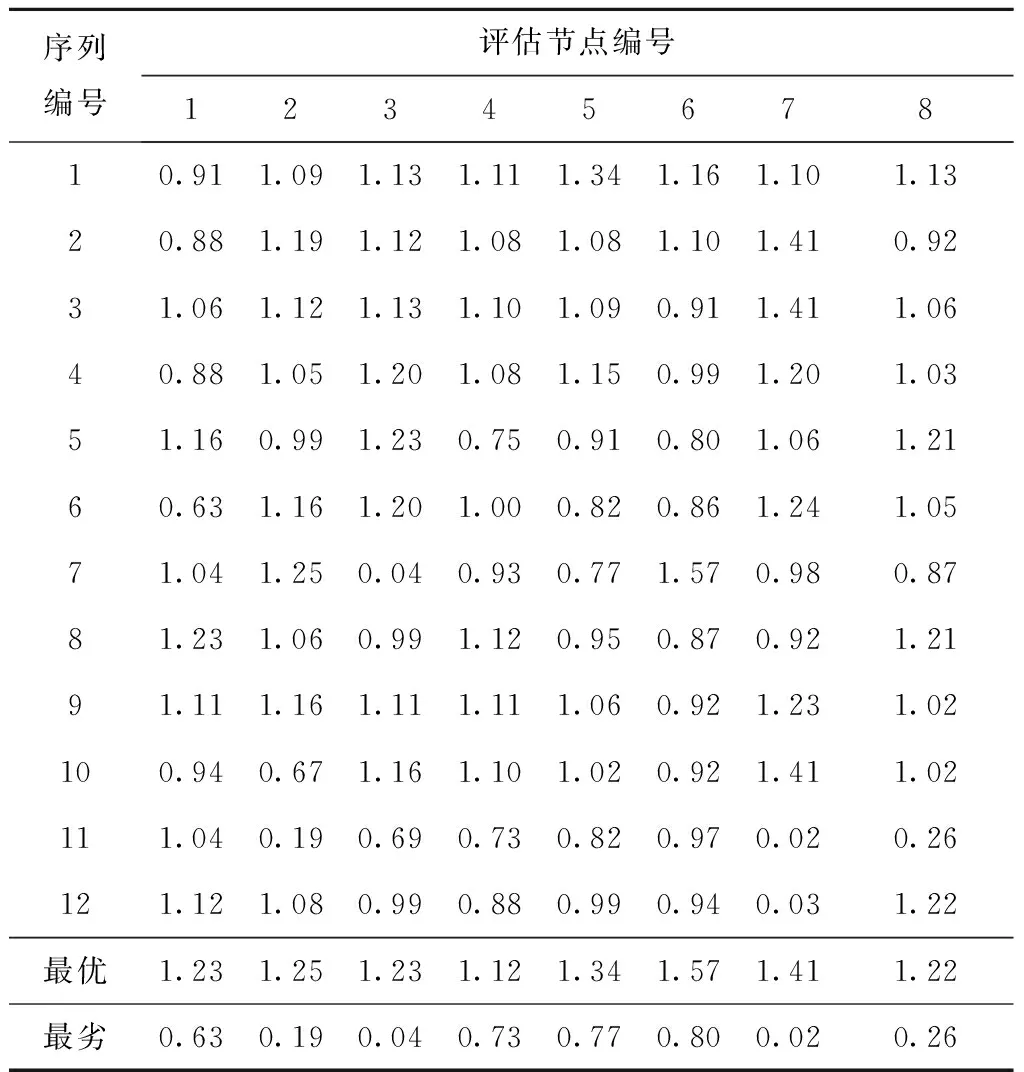
表2 12组方案对应炮手右手腕承载力评估数据的无量纲化结果
点击图4c界面中的“右手腕部位的评估结果”,输出12组方案评估数据,其与正理想解的关联度依次为0.822,0.803,0.819,0.779,0.754,0.74,0.723,0.78,0.797,0.764,0.532,0.71;与负理想解的关联度依次为0.529,0.555,0.555,0.563,0.628,0.649,0.653,0.575,0.557,0.59,0.86,0.658;灰色关联贴近度依次为0.609,0.591,0.596,0.581,0.546,0.533,0.525,0.576,0.589,0.564,0.382,0.519。由灰色关联贴近度结果可知,方案1对应的数据相对最高,方案11最低,说明在手轮轮径为200 mm、高低机手轮回转轴高为950 mm的方式下,炮手操作时右手腕的承载力最好,腕部姿势相对合理,发生疲劳的概率相对最低。在手轮轮径为280 mm、高低机手轮回转轴高为1 050 mm的方式下,炮手操作时右手腕的承载力相对最差,在高频率、高强度操作任务中易疲劳且损伤风险较高。同理,通过DASGOPE 1.0系统计算,可得方案在左手腕、右肘部、左肘部、躯干、臂部、膝盖、脚踝承载力指标下,对应的评估数据与最优参考之间的灰色关联贴近度,如表3所示。
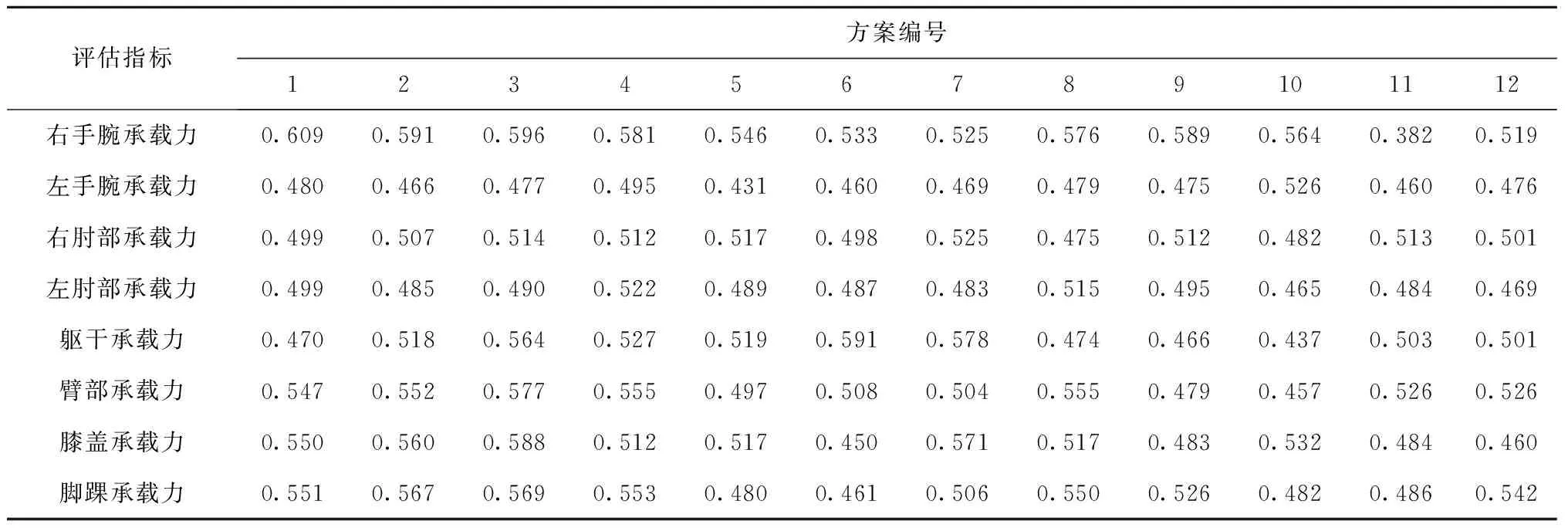
表3 12组方案在8项指标下对应的评估数据与最优参考之间的灰色关联贴近度
由表3可知,方案在各项指标下,评估结果的优劣排序存在差异,原因为:①炮手操作手轮的姿势涉及身体的多个部位,各部位之间相互关联,操作过程中的姿势变化对各部位的影响程度不同;②各项指标的评估侧重部位、方法、原则、标准、机制之间呈现差异化。
2.3 多指标综合评估结果
为计算方案在8项指标下的综合评估结果,由12组方案在各指标下的灰色关联贴近度数据构建比较序列S1~S12,提取最优数据建立参考序列S0为0.609,0.526,0.525,0.522,0.591,0.577,0.588,0.569,然后采用式(6)和式(7)计算比较序列S1~S12与参考序列S0之间的接近程度。在DASGOPE 1.0系统界面点击“8项指标下的综合评估结果”,输出结果如图5所示。

图5表明,序列S3,S4,S2与参考序列S0相对较接近,而序列S11,S10,S12与S0的接近程度较低,且接近程度均值较前3者的均值降低约19.42%。
由各组方案的接近关联度数据组建关联度集,根据式(8)~式(13)进行转换与计算。在DASGOPE 1.0系统中首先点击“差异矩阵变换”,输出结果如表4所示;然后点击“差异距离矩阵变换”,输出结果如表5所示;最后点击“相似矩阵变换”,输出结果如表6所示。

表4 DASGOPE 1.0系统中的差异矩阵变换结果

表5 DASGOPE 1.0系统中的差异距离矩阵变换结果
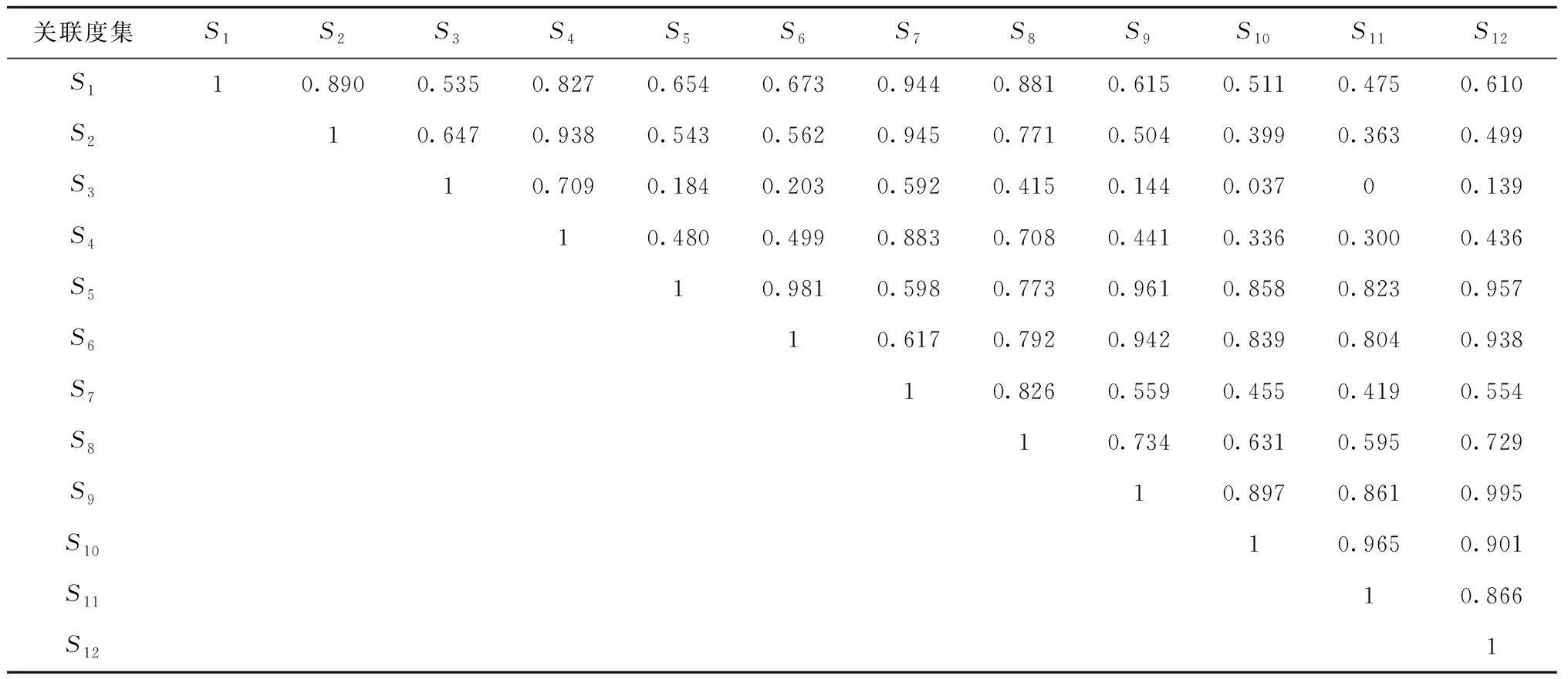
表6 DASGOPE 1.0系统中的相似矩阵变换结果
在DASGOPE 1.0系统中选择“聚类分析”,输入组类数要求,系统结合相似矩阵变换结果与方案的优劣排序,将12组方案划分为多个可定义的组类。若组类数为7,则定义为非常好、好、较好、一般、较差、差、非常差,对应方案的序列依次为{S3},{S4},{S2,S7},{S1},{S8},{S6,S5,S9,S12},{S10,S11};若组类数为5,则结果为好{S3}、较好{S4,S2,S7,S1}、一般{S8}、较差{S6,S5,S9,S12}、差{S10,S11};若组类数为4,则结果为好{S3}、较好{S4,S2,S7,S1}、较差{S8}、差{S6,S5,S9,S12,S10,S11};若组类数为3,则结果为好{S3}、中等{S4,S2,S7,S1,S8}、差{S6,S5,S9,S12,S10,S11}。由此,可基于筛选要求和方案的数量合理选择需划分的组类数。
由方案的综合评估可得,在牵引榴弹炮瞄准机手轮设备尺寸优化中,应重点参考设计方案3,即轮径为200 mm、高低机手轮回转轴高为1 050 mm;结合实际情况也可灵活参考优选的方案4和方案2,即轮径为200 mm、高低机手轮回转轴高为1 150 mm或1 010 mm。上述3组方案设计可有效提升炮手操作中手腕、肘部、躯干、臂部、膝盖、脚踝部位的承载力,从而在高强度实战操作中,炮手的肢体及各部位不易发生疲劳和损伤,使其可连续操作的时间较长,有利于提升人机工效。另外,应该避免参考方案10和方案11,由于这两种方案所对应的炮手操作姿势的合理度相对较低,在进行长时或高频率操作过程中,手腕、肘部、躯干、脚踝等部位会有不同程度的疲劳与损伤。如果瞄准机在设计与安装时对轮径、高低机手轮回转轴高尺寸有附加的限制和约束,优化时则应结合约束条件,从相对较优的组类中选择对应的设计方案作为参考。
3 结束语
本文研究基于人机仿真技术,以应用层为目标、表现层为介质、逻辑层为核心、数据和知识层为支撑,探索并提出一种系统化的炮手操作姿势多指标评估模型,同时面向模型中的评估数据处理模块开发了DASGOPE 1.0系统,并以某型牵引榴弹炮瞄准操作评估为例对模型进行应用,所得结论如下:
(1)人机仿真软件Siemens Tecnomatix Jack能够较好地从技术层辅助和支撑火炮等武器装备操作中的人体姿势量化评估研究工作,在该软件视角下提出的评估模型具有良好的可用性,能够从多指标维度全面、科学地评估炮手操作的行为姿势,从而快速、有效、精准地辨别火炮人机操控设备设计方案的优劣,有助于提取最优方案以及后续开展方案的优化工作。
(2)将GRA和TOPSIS相综合,提出灰色关联贴近度算法,结合灰色接近关联度算法、灰色关联聚类算法,能够准确计算和对比方案在同项与多项指标下的评估数据,为方案的优劣排序和组类划分建立基础。根据上述算法与使用逻辑开发的DASGOPE1.0系统,可提升评估数据收集、整序、计算、分析的效率。
(3)实例评估中的方案3相对最优,方案11最差,且各评估节点下的双手手腕、双手肘部、躯干、臂部、膝盖、脚踝部位承载力评估结果的均值较方案3依次降低约31.06%,0.40%,8.21%,0.51%,0.76%,9.92%。参照方案的优劣顺序与划分的组类数要求,可将12组方案划分到不同组类,在进行牵引榴弹炮瞄准机手轮尺寸设计与决策时,可快速、准确地指出应重点参考的最优或优选设计方案。
后续针对炮手操作中肢体负荷较大或受力大小和方向持续变化的行为姿势评估中,可加入详细的人体生物力学分析,使评估指标体系更加丰富,同时对评估模型进行优化,进一步提升评估的准确性;另外,可将评估模型适当拓展并运用到其他类型武器装备的人机操作姿势评估领域。