基于TRIZ方法的根茎类农作物收获机械创新设计
2021-09-11武林岳张士军张继国李成真
武林岳,张士军,张继国,李成真
(山东建筑大学机电工程学院,山东 济南250101)
随着科学技术的提高和农业研究的发展,越来越多的高产量根茎类农作物(生姜、马铃薯等)品种成功研制,使现代农业收获中,根茎类农作物亩产不断提高,且因其种植周期短、经济效益高等优点,逐渐成为一些农民的主要经济来源。但从目前的收获环境来看,国内的根茎类农作物收获不能达到全机械化收获程度,收获机械化率较低。以花生为例,据统计[1],目前我国花生的收获机械化率仅40%左右。为了响应我国《中国制造2025》的政策引导与农业产业发展升级,利用TRIZ创新方法对传统的收获机械创新,设计出一款更合理的根茎类农作物智能收获机械,提高工作效率。
1 TRIZ方法的应用与对机械的创新
1.1 为什么要用TIRZ方法
TRIZ是系统化的方法,在TRIZ中,问题的分析采用了通用且详细的模型与理论方法[2],使创新有了系统化知识与解决问题的系统化过程。
1.2 应用TRIZ方法对收获机械现状的分析
本项目基于现有收获环境,对根茎类农作物(生姜、马铃薯、花生等)进行收获机械的研究。以生姜收获机为例,如图1、图2所示,根据农业机械的专利数量与S曲线[3]的特点,收获机械的技术性能已经处于成熟期或衰退期,因而需要一种新型且创新点突出的收获机械。

图1 生姜收获机专利数量分析图

图2 S曲线各阶段特点分析图
1.3 创新方向的确定
1.3.1 创新方向的总结
1)最终理想解:为了获取完整干净没有茎秆的农作物果实,采用机械自动收获处理的作业方式。
2)九屏法:对子系统、系统和超系统的分析,可利用系统的内部资源(茎秆)与超系统隐性资源能源(电能、化学能等)。
3)金鱼法:对构想进一步分析,结合现有专利的设备功能,细化了机械的功能与结构。
1.3.2 机械进一步规划的功能需要与结构设想
如表1所示[4],为机械所需功能。接下来需要对实际环境进一步分析,以确定合理的结构。

表1 目的需要与机械对应功能分析
1.4 技术系统进化法则分析
1.4.1 向超系统跃迁法则
根据向超系统跃迁法则,对超系统土壤地面的性质进行分析,调节夹持装置的倾斜角度,使夹持装置完成拔提。
1.4.2 能量传递法则
根据能量传递法则,收获作业时间小于2 h,采用电动机和蓄电池驱动机械,提高能量利用效率;收获作业时间大于2 h,采用柴油机作为动力装置驱动机械,可控性更好,作业时间更长。
1.4.3 动态性和可控性法则
根据应用动态性和可控性法则,绘制如图3所示的分析阴影,在移动性方面,通过动力装置驱动机械进行移动。在可控性方面,利用结构优势使夹持装置夹持开口可调节,方便夹持、维修。对剪切装置进行结构的设计,能够对刀具高度进行一定程度的调整,方便机械适用于多种环境。在柔性方面,夹持装置可用夹紧传送带来夹紧茎秆拔提,提高机械的柔性。

图3 动态性和可控性法则分析阴影图
1.5 问题与冲突的解决与技术方案
如图4所示,为农作物生长与拔取状态简图。

图4 农作物生长与拔取状态简图
1.5.1 物理冲突的解决
1)农作物生长环境的土壤紧固力解决。农作物果实与土壤的接触面积既需要小又需要大。运用时间分离原理,生长时农作物果实与土壤充分接触,成熟后使农作物果实与土壤的接触面减少。运用空间分离原理,在成熟收获时,运用松土犁疏松土壤,采用夹持装置,拔提茎秆移出农作物[5]。
2)农作物茎秆的使用与处理。既需要农作物的茎秆,也不需要农作物的茎秆。采用时间分离原理,当农作物果实移出土壤时,保留茎秆,拔取农作物;当农作物果实移出土壤后,去除茎秆。采用条件分离原理,在拔提农作物的时候,夹持茎秆;在拔提传送之后,用剪切刀具切去茎秆[6]。
1.5.2 四十条发明原理
阿奇舒勒通过对大量的发明专利进行研究、分析、总结,提炼出了TRIZ理论中最重要的、最具普遍用途的40条发明原理。(包括:1.分割;2.抽取;3.局部质量;4.非对称;5.组合;6.普遍性;7.嵌套;8.配重;9.预先反作用;10.预先作用;11.预先应急措施;12.等势原则;13.逆向思维;14.曲面化;15.动态化;16.不足或超额行动;17.维数变化;18.机械振动;19.周期性动作;20.有效作用的连续性;等。)
采用原理3局部质量原理。用松土装置疏松土壤,使周围泥土变得松软、不均匀,方便拔提农作物。
采用原理18机械振动原理。去除农作物泥土时,设置振动筛的周期性振动,清理泥土。
采用原理17维数变化原理、原理20有效作用的连续性原理。使用辅助拨动装置,集中收拢农作物茎秆,方便精准拔提。设计多层排列结构,从上至下依次为茎秆剪切、泥土分离和果实收集。各个部分都能进行持续工作,消除了间歇性动作,工作节奏紧凑连续,提高收获效率。
采用原理5组合原理、原理15动态化原理。设计垫块和刀片组合的方式,通过调节垫块的位置改变圆盘切刀高度,同时在垫块的紧固作用下,可使圆盘切刀旋转更稳定。设置可调节夹持开口,有利于机械收获多种环境的根茎类农作物[7]。
1.5.3 最终技术方案
1)农作物移出土壤:夹持装置(夹紧传送带)、辅助拨动装置、松土装置(松土犁),精准快速拔取农作物果实。
2)农作物茎秆去除:剪切装置(圆盘切刀和垫块),稳定剪切,切刀可调节高度。
3)农作物泥土清理:泥土分离装置(振动筛和毛刷),双重作用使农作物与泥土分离,毛刷还具有下落缓冲功能。
4)农作物果实收集:果实茎秆收集装置(果实收集箱和茎秆收集箱),分别收集果实和茎秆。
2 收获机械的工作原理与装置分析
2.1 工作原理
收获机械充分利用根茎类农作物特点,采用拔提与移动巧妙结合的方式实现农作物收获。其工作原理是:调节好夹持开口角度与圆盘切刀高度,通过松土犁松土与辅助拨动装置集中茎秆,夹持装置拔提茎秆并传送至上方,剪切装置切去茎秆,果实落入毛刷和振动筛组成的泥土分离装置中,果实清洁完成落入果实收集箱中,被切去的茎秆落入后方茎秆收集箱中。具体的收获机械模型图如图5所示。

图5 收获机械模型图
2.2 动力装置分析
动力装置根据种植规模不同,采用不同方案进行动力装置搭配,有以下两种方案:1)电动机+蓄电池的搭配方案;2)以柴油机为动力装置的方案。当收获规模小、收获作业时长小于2 h时,使用电动机和蓄电池作为动力装置提供动力;收获时长在2 h以上,使用柴油机作为动力装置提供动力。机械最终的工作效率应为每小时1亩~1.5亩。
2.3 松土装置分析
如图6所示,松土装置采用松土犁松土,通过收获机械的前进和松土装置的前后摆动松土,减少土壤对农作物的根茎果实的束缚力,方便夹持机构拔提出农作物,摆动幅度介于25°~35°。
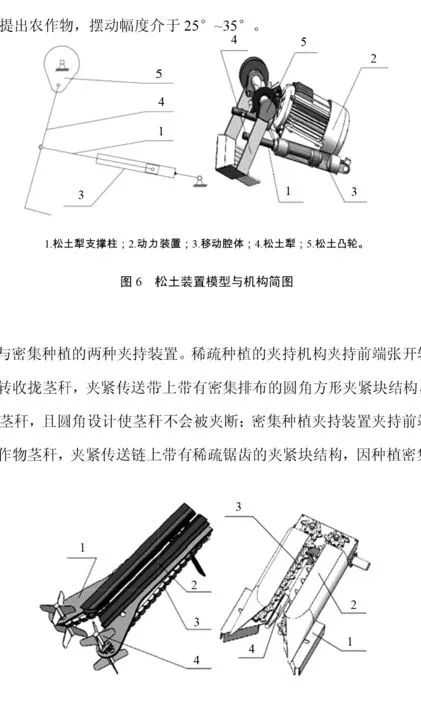
图6 松土装置模型与机构简图
2.4 可调节精准夹持传送装置
如图7所示,为稀疏种植与密集种植的两种夹持装置。稀疏种植的夹持机构夹持前端张开较大,辅助拨动装置位于夹持位置的前段外侧,相对向内旋转收拢茎秆,夹紧传送带上带有密集排布的圆角方形夹紧块结构,因种植稀疏,圆角方形夹紧块能够更好地固定夹持农作物茎秆,且圆角设计使茎秆不会被夹断。密集种植夹持装置夹持前端张开较小,辅助拨动装置处于下方,相对向内旋转收拢农作物茎秆,夹紧传送链上带有稀疏锯齿的夹紧块结构,因种植密集,锯齿可更好地插入茎秆内部,夹持拔提茎秆。

图7 夹持装置结构模型图
夹持装置与水平面应倾斜放置,将农作物传送至上端,进行后续的茎秆剪切与泥土分离工作。如图8所示,夹持装置与水平面的倾斜角度为θ,θ在30°~40°范围内。根据农作物茎秆的情况,通过可调节板架进行夹持开口的调节,夹持开口角度α可调节范围为5°~30°。可调节的夹持开口,能够适应多种环境的作物夹持,方便维修与机械检查等。
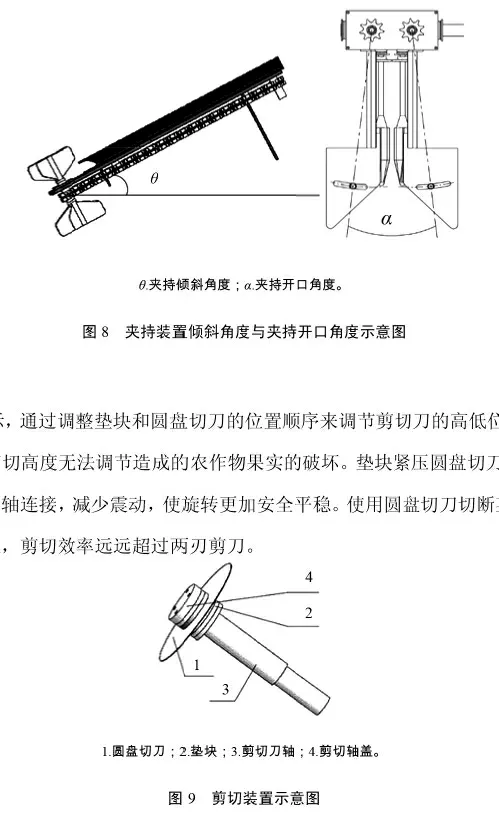
图8 夹持装置倾斜角度与夹持开口角度示意图
2.5 可调节剪切装置
剪切装置示意图如图9所示,通过调整垫块和圆盘切刀的位置顺序来调节剪切刀的高低位置,可以适用于剪切多种不同茎秆长度的农作物,减少了因剪切高度无法调节造成的农作物果实的破坏。垫块紧压圆盘切刀,与剪切轴盖通过四个螺栓固定,剪切轴盖通过螺纹与剪切刀轴连接,减少震动,使旋转更加安全平稳。使用圆盘切刀切断茎秆,垫块可调节高度为4 mm×25 mm,旋转平稳,剪切快速,剪切效率远远超过两刃剪刀。

图9 剪切装置示意图
2.6 泥土分离装置
泥土分离装置与机构简图如图10中左图所示,毛刷与振动筛[8]组成的泥土分离装置两次分离泥土,不仅能够使果实上的泥土分离得更彻底,而且毛刷作为初分离的装置在农作物下落时也能起到缓冲的效果,保护农作物果实不会因为过脆而导致下落时受冲击摔碎[9]。振动筛的极位夹角如图10中右图所示,μ在10°~20°范围内,可根据农作物种类进行调整,设置筛土轴转速范围为120 r/min~180 r/min。

图10 泥土分离装置与机构简图
2.7 果实茎秆移动收集装置
2.7.1 收集装置
果实收集箱为镂空设计,可以在移动中继续令泥土下落;茎秆收集箱为平滑斜板设计,使茎秆自然落入收集箱中。分别用于收集农作物的果实与茎秆,如图11所示。
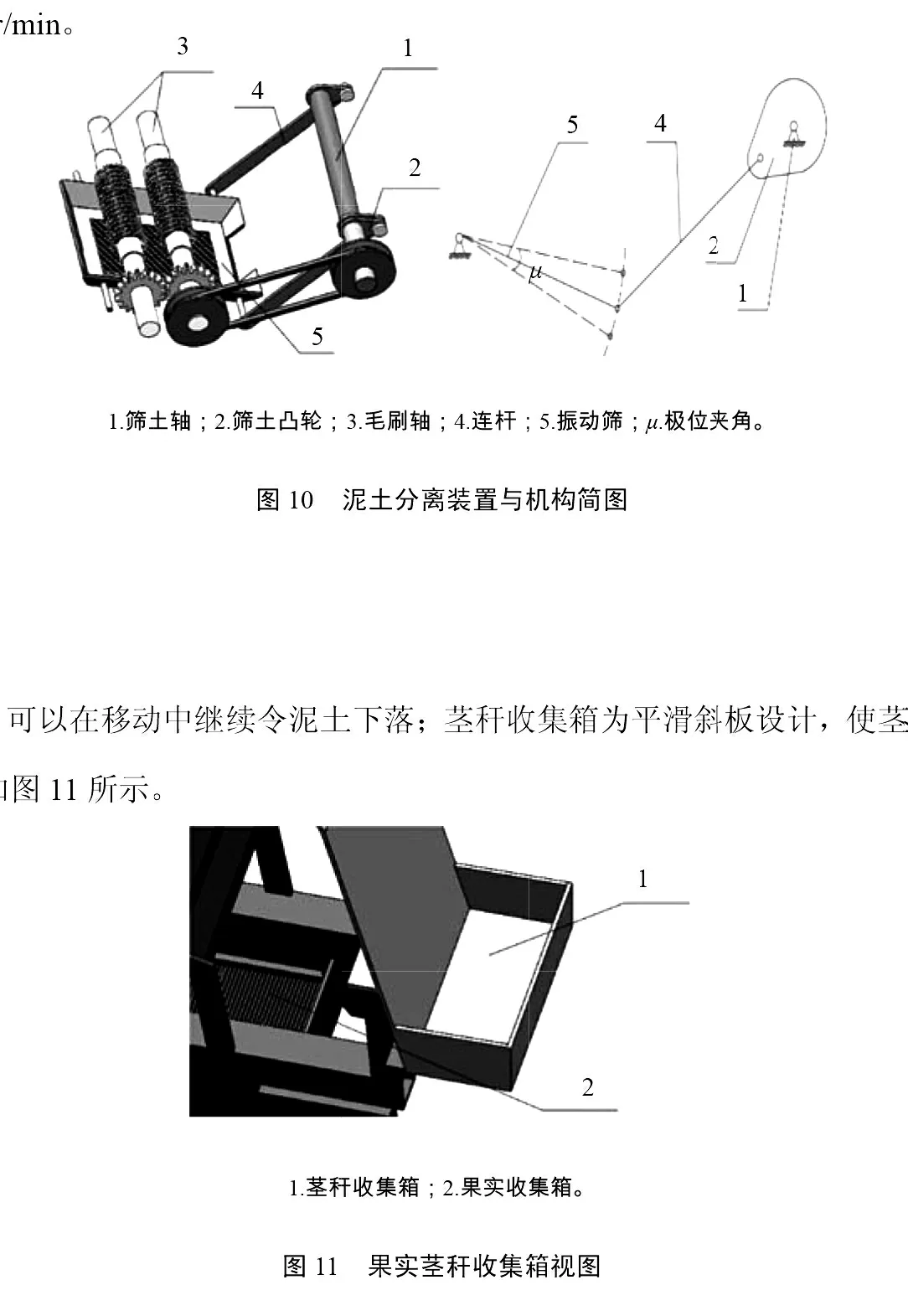
图11 果实茎秆收集箱视图
如图12所示,为机械工作流程示意图。茎秆的收集流程,通过多层排列和流水线式的作业方式,在完成了其他功能之后,移动中便可收集干净的果实与被切断的茎秆。

图12 机械工作流程示意图
2.7.2 行走装置
基于根茎类农作物收获环境的不同,设计出两种不同的行走轮,如图13所示,使机械能够在不同的土壤状态下正常移动作业。普通行走轮适合土壤有良好摩擦力的平缓地面环境,可以使机械平稳运行;并可采用带有花纹的橡胶轮胎,在减震的同时与土壤具有适当的摩擦,更能帮助正常平稳作业。而在某些特殊土壤环境下,为了避免行走轮因打滑等问题无法前进,设置了一种增加抓地力的行走轮,可在特殊的土壤环境下正常行走作业。

图13 行走轮视图
3 结论
利用TRIZ方法设计创新的此种一体化收获机械,不仅做到了结构简单,功能齐全,而且从可调节性与可适应性的角度进行了考虑,对多种根茎类农作物或多种种植环境都能有很好的兼容性,对农业机械的发展具有了一定的研究意义与价值。作为一种机械产品,不仅可以进行贸易交流,也可以不断地进一步创新发展,根据TRIZ方法提供的经验,我国能够更好地利用该方法进行农业机械的高水平发展与智能化提升。
