某地铁车辆制动状态故障分析与改进措施
2021-09-10刘瑜何小军刘尧喜亓保平
刘瑜 何小军 刘尧喜 亓保平


摘 要:采用EP2002制动系统的某地铁车辆在运行过程中,HMI多次报出制动状态故障,提示某节车制动状态不一致,经下载制动系统故障数据分析,制动系统并未报出故障。对TCMS系统数据分析后,发现该故障的根本原因在于制动状态故障的判断逻辑。本文通过对故障数据与制动状态故障判断逻辑进行深入分析,明确了制动状态故障的问题原因,并制定了改进措施,经过改进后,列车运用良好,未再报出该故障。
关键词:制动状态故障;架控;制动系统;EP2002
0 引言
某地铁项目车辆制动系统采用EP2002制动系统,该制动系统为架控式,即每个EP2002阀控制一个转向架的空气制动,由于其先进性与可靠性,目前在国内地铁项目中得到了广泛运用。本地铁项目车辆上线以来,多次报出制动状态故障,其中T555车报5车制动状态故障,T252车报2、3、6车制动状态故障。回段后,分析制动系统监控数据,制动系统制动状态正常,未报故障。对下载的TCMS系统数据进行分析,发现该问题是由于制动状态故障判断的逻辑导致的。
本文通过对制动状态故障判断逻辑深入分析,结合TCMS系统故障数据,研究该故障的根本原因,并制定有效改进措施。
1 制动状态故障判断逻辑分析
制动状态故障主要基于制动状态一致性判断,TCMS系统比较LCU从智能阀(网关阀)采集的硬线信号与BCU通过MVB网络发出的制动状态信号是否一致,当不一致時,报出制动状态故障。
1.1 制动状态信号来源
本地铁项目车辆制动系统采用EP2002制动系统。如图1原理图所示,每节车辆上的智能阀(网关阀)上PL2插头针脚的制动状态信号均通过硬线给 LCU 进行采集,该处信号为一个0.4 bar压力开关信号,每个智能阀(网关阀)制动状态判断逻辑是:制动缸压力大于 0.4 bar 时,判定该阀为制动状态;制动缸压力不大于 0.4 bar 时,判定该阀为缓解状态。LCU采集该信号后发送到TCMS系统。
另一方面,制动系统BCU对于制动状态(施加或者缓解)通过 EP2002 阀内置控制软件实时读取制动缸压力予以判断,并向 TCMS系统实时反馈。
1.2 制动状态故障判断逻辑
本项目中,TCMS系统将每节车的BCU反馈网络的制动状态信号与LCU采集的制动状态硬线信号作一致性判断,其判断逻辑如下:
①BCU 反馈转向架 1 或转向架 2 制动未施加,同时 LCU 反馈转向架 1空气制动或转向架 2空气制动未缓解;
②BCU 反馈转向架 1 且转向架 2 制动已施加,同时 LCU 反馈转向架 1空气制动且转向架 2空气制动已缓解。
上述情况下,持续时间超过 8 s报出制动状态故障。
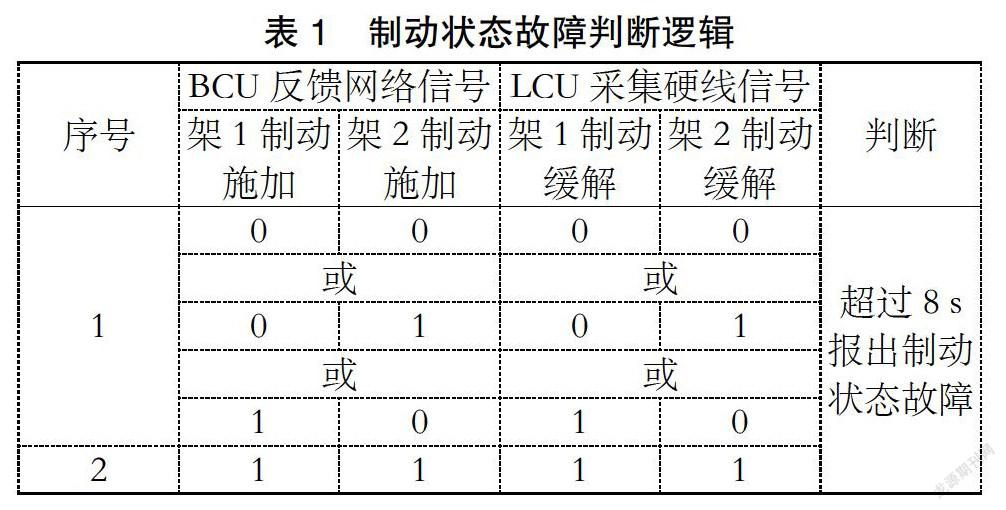
即对BCU 反馈转向架 1 和转向架 2的制动施加信号取“与”运算,对LCU 反馈转向架 1和转向架 2制动缓解信号取“与”运算,二者结果相等时,持续时间超过 8 s报出制动状态故障。其具体判断逻辑如表1所示,当每节车的BCU反馈网络信号与LCU采集硬线信号符合下述条件时,则判断制动状态故障。
该逻辑本意是比较LCU从智能阀(网关阀)采集的硬线信号与BCU通过MVB网络发出的制动状态信号是否一致,当不一致时,报出制动状态故障。但实际上从表1来看,当单节车架1与架2的制动信号不一致时,尽管此时BCU反馈网络的制动状态信号与LCU采集的制动状态硬线信号一致,超过 8 s也会报出制动状态故障。
例如,当单节车架1与架2制动状态不一致时,表中信号(BCU架1制动施加,BCU架2制动施加,LCU架1制动缓解,LCU架2制动缓解)为0 1 1 0 或者1 0 0 1,超过8 s也会报出制动状态故障。此时,BCU反馈网络的制动状态信号与LCU采集的制动状态硬线信号实际上是一致的。
2 故障数据分析
T555车与T252车的制动系统数据无异常,因此,对T555车与T252车的TCMS故障数据进行分析。
2.1 T555车故障数据分析
查询TCMS系统数据,在10:57:54时,架1制动缸压力34 kPa,架2制动缸压力36 kPa,BCU判断架1制动未施加,架2制动已施加,LCU采集信号架1制动缓解,架2制动未缓解,反馈给TCMS系统信号(BCU架1制动施加,BCU架2制动施加,LCU架1制动缓解,LCU架2制动缓解)为(0 1 1 0),此时,BCU与LCU反馈信号一致,架1缓解,架2制动,此状态延续10 s至10:58:04。制动状态故障判断逻辑成立,因此报出制动状态故障。
2.2 T252车故障数据分析
查询TCMS系统数据,在05:45:31时,B1车架1制动缸压力37 kPa,B1车架2制动缸压力37 kPa,BCU判断B1车架1制动已施加,B1车架2制动未施加,LCU采集信号架1制动未缓解,架2制动缓解,反馈给网络系统信号(BCU架1制动施加,BCU架2制动施加,LCU架1制动缓解,LCU架2制动缓解)为(1 0 0 1),此时,BCU与LCU反馈信号一致,架1制动,架2缓解,此状态延续8 s至05:45:38。制动状态故障判断逻辑成立,因此报出2车制动状态故障。
在05:45:31时,C1车架1制动缸压力37 kPa,C1车架2制动缸压力35 kPa,反馈给网络系统信号为(0 1 1 0),此状态延续8 s至05:45:38。制动状态故障判断逻辑成立,因此报出3车制动状态故障。同理,C2车架1制动缸压力38 kPa,C2车架2制动缸压力34 kPa,反馈给网络系统信号为(1 0 0 1),报出6车制动状态故障。
3 原因分析与改进措施
3.1 原因分析
原因主要有以下2点:
①BCU 对于制动状态(施加或者缓解)通过 EP2002 阀内置控制软件实时读取制动缸压力予以判断,并向 TCMS 实时反馈。LCU 读取信号源为 EP2002 阀 PL2 插头针脚 压力开关信号。LCU所使用开关信号触发值均参考如下名义值:
- 制动压力下降沿(缓解方向) 动作值: 0.25 bar;
- 制动压力上升沿(施加方向) 动作值: 0.4 bar;
在不同的制动进程里,同样的BCP压力在临界区间,可能会对应着不同的制动状态信号。
上述报出故障的车辆BCP压力记录值在0.34 bar~0.38 bar上下,该压力处于制动施加/缓解状态判断临界点附近,EP2002阀随机报告制动缓解或者制动施加属正常现象。
②对于制动状态一致性的判断,在以往的车控式制动系统中,是从每节车的信号一致性进行判断,因为车控式制动系统的特点,整车制动状态是一致的,所以该控制逻辑在运用过程中未出现过问题。而在本项目中,由于使用了架控式的EP2002制动系统,再沿用以前的控制逻辑,从每节车的信号一致性进行比较,就会导致在架1与架2制动状态不一致时,会报出制动状态故障。而在架控式制动系统中,各转向架制动状态都是独立控制的,不同转向架的制动状态存在短暂的不一致是正常现象。
3.2 改进措施
对每节车的信号一致性进行判断,会导致在架1与架2制动状态不一致时,也会报制动状态故障。因此将每节车的信号一致性判断改成每一转向架的信号一致性判断。
另外,制动工況时没有判断制动状态的需求,信号一致性主要用于制动未缓解的识别,避免发生制动未缓解,带闸行驶影响行车安全。因此在制动工况不需要进行信号一致性判断,可以改为在非制动工况下进行信号一致性判断。
综上,针对制动状态的一致性判断逻辑改成如下:当列车在非制动的工况下,如果检测到该架的硬线制动状态输出信号和BCU软件制动状态输出不一致超过8 s则判断制动状态故障。本项目在制动状态故障判断逻辑更改后,安全运行至今未发生一起制动状态故障。
4 结论
本文对本项目制动状态故障的判断逻辑进行了深入分析,找出了该项目频繁报出制动状态故障现象的根本原因,并作出了相应的改进措施,经改进后,运用良好,未再出现该故障现象。
参考文献:
[1]何晔,罗庆.广州地铁5号线车辆EP2002制动系统故障分析及改进[J].机车电传动,2011(4):50-51.
[2]马喜成,龙倩倩.地铁车辆用EP2002制动控制系统[J].机车电传动,2007(4):38-42+61.
