薄壁钛管管头机器人焊接技术探究
2021-09-10李权朱强
李权 朱强

摘要:传统手工氩弧焊速度慢,质量不稳定,现有的机器人焊接技术不能满足薄壁钛管管头焊接要求。本文提出一种利用三维模型信息技术,根据管头形状和高度模型信息动态控制焊接参数,实现薄壁钛管管头机器人自动焊接。
关键词:机器人;薄壁钛管;焊接;动态控制
一、引言
机器人焊接是一种高度自动化的焊接技术,目前,采用机器人代替手工焊接作业是焊接技术的总体发展趋势,是提高焊接质量、降低成本、改善工作环境的重要手段。机器人焊接作为现代制造技术发展的重要标志己被国内外许多工厂所接受。机器人焊接,焊接速度快,焊枪过程不会振动,焊接过程中速度不会忽快忽慢,能得到均匀、漂亮的焊缝,所以能提高焊接效率和质量。
二、背景技术
钛是一种对海水、酸、碱等有极强的防腐能力的材料,工业纯钛强度与钢差不多,密度约为钢的一半,用于制造换热器,具有重量轻、防腐能力强的优点。然而,薄壁钛管管头焊接是一项难度极高的工作,因为钛是一种活跃金属,换热器用钛管(TA2)在350℃以上会强烈吸气、脆化、产生气孔及开裂,性能严重下降,TA2钛管熔点较高,比热小,焊接线能量大时,冷却慢,易使晶体粗大,塑性降低,线能量小时,冷却快,又会出现a相 (钛马氏体),塑性下降。
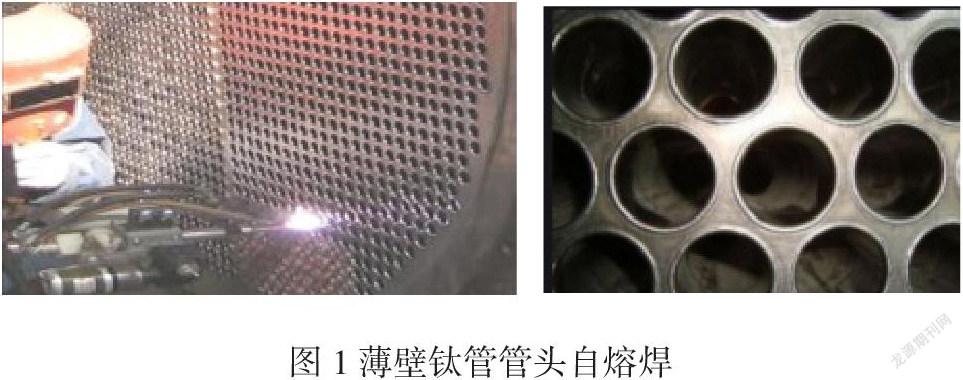
近年来,由于世界上钛管产能提高,价格下降,越来越多地被用来生产电力、化工、海水淡化等装备中的耐腐蚀换热器。钛管换热器的管头与管板需要密封,使两边流体不串通,密封方法通常为贴胀加密封焊。由于钛管很簿,采用加丝焊极易熔穿,以目前仅使用钨极氩气保护自熔焊(图1)。焊接时,管头先用胀管机贴胀,切除多余钛管管头同时时预留1-2mm高度,清洗后全位置熔焊接一圈,使管头融化与管板熔合成光滑的环形焊缝。
薄壁钛管焊接现在的技术分别是手工氩弧焊(包括手工操作的半自动机械焊接)和机器人焊接。薄壁钛管焊接前需要切除多余的钛管管头,切除后的管头受到刀具刃口变化和机械振动的影响,其切口的形状、留下管头的高度是不规则的。手工氩弧焊焊接时,工人可以根据经验调整焊接参数和焊枪方位,保证焊接质量。手工氩弧焊的缺点是对工人技术要求较高,焊枪会振动,焊接速度会改变,造成焊缝不光滑均匀,焊接速度慢,质量不稳定。机器人焊接的核心技术是示教-再现模式:首先操作机器人动作,并让机器人记住这个过程,然后让机器人根据需要重复上述动作过程。示教再现的优点是动作准确,没有偏差,并可以自动反复不断地工作,适合大批量的生产。但是,示教再现对于一些需要根据外部信息进行实时决策的应用无能为力。目前很多的机器人焊接采用焊缝视觉跟踪,也只能自动保持焊丝与焊缝的相对位置不变,但不能识别切口的形状和管头的高度,不能在焊接中途调整电流参数和焊枪距离,指所以不能满足薄壁钛管管头焊接的要求。
三、技术方案
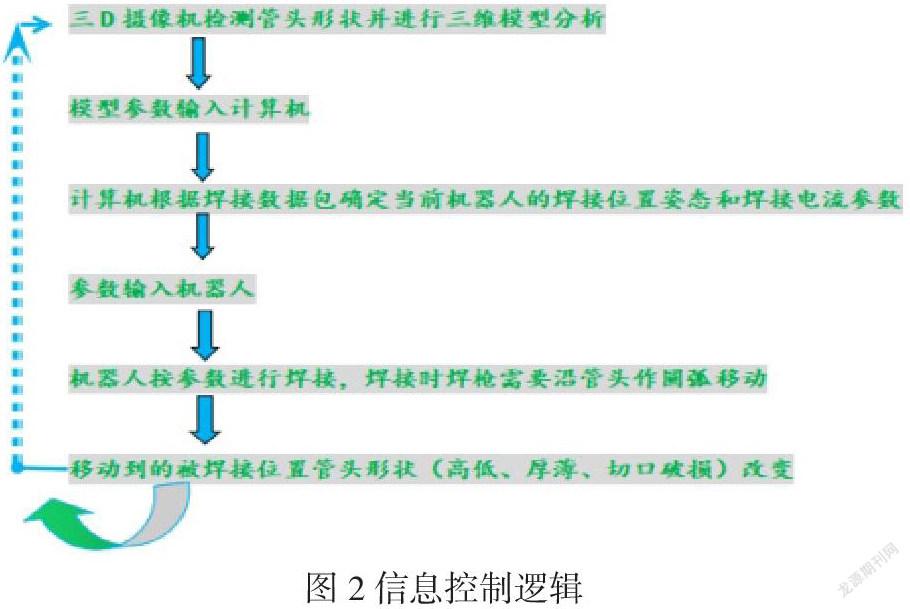
针对钛管管头形状和高度不规则的特性,我们通过研究发现,可以利用三维信息控制技术来动态控制焊接,使问题得以解决。信息控制逻辑见图2。
本技术的关键是利用三D摄像头对换热管的管头进行三维分析,得到管头模型信息参数,动态控制机器人的位置和姿态,并根据三维信息调用焊接数据包,动态设定氩弧焊机的焊接参数,实现薄壁钛管管头机器人自动焊接。技术方案如图3所示。
焊接操作過程:
1)用六轴机器人的腕部法兰安装好氩弧焊机,把三D摄像机固定在支架上,连接好数据线,把六轴机器人与三D摄像机的信号同时连接到计算机。
2)编写六轴机器人的运动程序,使氩弧焊机的焊枪钨极移动到换热管的正前方。
3)启动三D摄像机,对换热管的管头进行三维分析。
4)计算机根据换热管的管头形状和高度模型信息,动态控制六轴机器人的位置和姿态,并根据焊接数据包,动态设定氩弧焊机的焊接参数。
5)用计算机调用六轴机器人的焊接程序,使氩弧焊机对管板上的换热管管头进行自动焊接。焊接全过程设置氩气气压报警装置,在气压不足时自动停机并发出相应报警讯号。
四、应用前景
钛管换热器在中国沿海的使用量非常大,海边的石油化工厂、火力发电厂和核电站常用的海水换热器,如凝汽器、闭式水换热器、油冷却器,以及海水制盐多效蒸发器、海水淡化装置、船用换热器等,大都使用钛管。例如利用我国自主研发的第三代核电技术“华龙一号”建设的的福清核电站、巴基斯坦卡拉奇核电站,就使用了大量的钛管换热器。本技术可以解决钛管换热器工业生产中的技术瓶颈,使该行业摆脱对高水平焊工的依赖,提高作业自动化水平、提升产品的焊接效率和成形质量,将大大促进钛管换热器行业的技术进步。
参考文献:
[1]工业机器人焊接关键技术分析及应用分析[J].杨宏伟,吕建新,王娜,张伟.电子世界.2021(03)
[2]中国工业机器人数据统计[J].梁文莉.机器人技术与应用.2015(02)
[3]焊接工业机器人的动力学研究[J].李琚陈,吴刚.西安文理学院学报(自然科学版).2017(03)
[4]工业机器人在制造业中的应用[J].黄晓辉.信息记录材料.2018(08)
[5]焊接机器人技术研究现状与发展趋势探索[J].张元良,顾俊。2017(26)
作者简介:李权(1972.5- ),男,汉族,广东茂名市人,本科/学士(东南大学),教授级高级工程师,研究方向为节能环保技术、压力容器和热交换器研发、工业机器人技术等。工作单位为广东理工职业学院
广东理工职业学院 广东 广州 510000
