基于PSO算法的增氧灌溉TDF-IMC-PID控制研究
2021-09-10马月虹
刘 德, 马月虹,, 刘 娜,, 王 彦
(1. 新疆农业大学机电工程学院,新疆 乌鲁木齐 830052; 2. 新疆农业科学院农业机械化研究所,新疆 乌鲁木齐 830091)
0 引 言
在现代农业领域,灌溉是很重要的一个方面。传统的灌溉方式可以满足作物根部对水分的需要,但同时水分会排除作物根部的氧气含量,造成根部区域的水氧矛盾[1]。农作物的根部在持续缺氧的环境下,呼吸作用会减弱,作物干物质的积累量也会减少[2]。目前推广的微纳米曝气技术对灌溉水增氧,使用微纳米气泡发生器对水体直接进行充氧,装置的核心是气液混合泵,水体经过管道连接曝气头,曝气头中的减压释气孔具有降压的作用,当水气混合物流经释气孔时,曝气头的喉部区域产生负压进而水中的溶解气体释放为微气泡[3]。微纳米气泡的气液比表面积较大,在水体中存留的时间较长,可达到的溶氧量较高且衰减速度慢[4]。对水体加氧的实现过程中,曝气溶氧控制系统下的溶解氧浓度值是一个重要的指标,由于此控制中存在较大的滞后,常规PID控制策略不能做到精确稳定的控制,存在控制精度不够,产生较大超调量,造成鲁棒性和稳定性较差[5]。常规PID在参数整定的过程中,往往需要根据建立的数学模型做大量的人工调整,这个过程是比较费时的,而且最终得到的也不是最佳的参数[6]。若需要调节的参数过多,那么对于PID参数的调整优化更加困难,IMC-PID(内模PID)对于存在大时滞部分的数学模型有较好的控制效果,但是只对一个参数进行整定优化,往往需要在系统的目标跟踪和抗干扰性能之间进行折中,难以兼顾平衡[7]。为了使目标跟踪性和抗干扰性同时达到最优,本研究采用TDF-IMC-PID(二自由度内模PID),然而对两个参数的整定过程是比较繁琐的[8],在控制器的参数进行整定寻优方面,相关人员做了大量的研究,彭炫等采用差分进化算法整定优化控制器参数[9],孙功武等采用最大灵敏度指标确定控制器参数[10],张堃等采用预测优选专家控制整定参数[11],翟维枫等采用BP神经网络控制,从而实现溶氧浓度的快速控制[12]。上述整定算法存在控制器复杂,需要积累大量的经验才能对参数做到合理整定,通过试凑法整定参数具有很大的盲目性[13]。本研究采用ITAE目标评价函数,结合PSO粒子群算法[14],提出了一种基于PSO粒子群优化的TDF-IMC-PID控制来调节整定相关参数,该算法参数优化速度快,在保证响应速度的情况下,同时兼顾较好的跟踪性能和鲁棒稳定性[15]。
1 灌溉水增氧及灌溉过程
本系统选定 370 W 自吸泵,电源 220 V/50 Hz,转速:2860 r/min;最大流量:22 L/min,额定流量:16 L/min。额定扬程:12 m ,通过调压调速的方式控制自吸泵的流量。气液混合泵的功率为0.55 kW,制氧机的最大流量为5 L/min,且流量可调节,曝气水箱中水体容积为6 L,增氧灌溉装置示意图见图1。

图1 增氧灌溉装置示意图
上图中的溶氧工艺过程为,气液混合泵对曝气水箱不断循环增氧,制氧机给气液混合泵通入氧气,同时自吸泵从温室蓄水池抽水,将水体输到曝气水箱,水箱出口接与抽水自吸泵相同流量的自吸泵抽水至灌溉区域,若是将水体输送至灌溉蓄水容器,再由此容器流向灌溉区域,那么可以增加曝气水箱的高度,水箱开溢流口,达到自流效果,故出水管路处无需接自吸泵。曝气水箱中水气混合反应比较剧烈,不利于溶氧值的检测,故检测曝气水箱出水管道末端的溶氧值。考虑到增氧过程中长距离灌溉下管路中水体溶氧值的损失,常规以空气为气源的条件下难以达到较高的饱和溶氧浓度,结合相关种植经验,为实现作物增产,对到达作物根部处的水体溶氧值应保证在9 mg/L以上,自曝气水箱沿管路向作物根部区域的输送过程中氧浓度值衰减性较大,结合试验现场管路的实际衰减情况,为保证最终实现可靠溶氧效果,故应将曝气水箱的出水管路末端的溶氧值设定为12 mg/L,夏季气温较高时受温度的影响,根部区域溶氧衰减会较大,目标值应设置为14 mg/L。经过现场勘验,自吸泵从蓄水池抽水至出水,大约50 s后才会出水。而对6 L水量采用本文的增氧设备充氧至12 mg/L,需要15 s左右。若对曝气水箱先增氧后再通过自吸泵抽水,为了避免曝气浪费,需要对气液泵进行启停操作,30 s后再开启,会造成设备的一次启停,且系统各个设备存在延迟,达不到同时启停,存在工况不稳定的状况。由此将过程定为先给曝气水箱通水,再开启溶气泵进行通气增氧。在这种过程中发现开始通氧后至达到稳定工况,响应过程存在一定的时间,本文将对这个问题进行相关研究分析,设计控制器进而再通过对相关控制量的可靠调节来减少超调量并缩短系统响应时间。
2 溶氧系统中控制量的确定
在实现增氧灌溉过程中,通气量会对灌溉管路中的水体溶氧浓度产生显著影响,输送到作物根部区域的氧浓度值会直接影响根部区域的呼吸环境,为保证水体输送至根部区域具有可靠氧浓度值,需要持续且稳定供气。其次水体温度、进气量、进水量、进气氧浓度、以及泵内压力、出水压力等因素均会对溶氧效果造成影响。由溶气原理可知,进气量与进水量的比值会影响装置溶氧效果。当气液混合泵进气量过大时,气体不能完全溶解于水中,在这种情况下会导致水泵出口处形成大气泡。其次进气量太小时,虽然通过系统可以形成微气泡,但是气泡的产量也随之降低。参考该泵的工作特性,泵内的压力变化与进水量变化为负相关,该泵的出口压力一般由流量控制阀调节,流量越大则压力越小,流量越小则压力越大。
2.1 不同通气量下的溶氧值研究
本文以通入空气量作为控制量,研究以不同通气量对气液混合泵的溶氧能力做了如下研究。实验水体为中性,水体温为20 ℃,为了使曝气性能充分体现,本实验使用去离子水80 L。进行曝气试验开始前,首先使用化学试剂去除水体内原有的溶解氧,接着开始曝气试验,通入空气量分别为 1, 2, 3, 4,5 L/min,然后使用便携式溶氧仪测定水体溶氧量。测定循环曝气过程中1~ 25 min的溶氧值,结果如图2所示。

图2 通气量大小对溶氧值的影响
经过测定得到了如下实验结果,随着曝气时间的增加,水体中的溶氧量以曲线增加。气量越高,达到曝气饱和溶氧值的时间也越短,但是从能耗角度来看,1 L/min和5 L/min两种通气量下的溶氧状况,当后者通气量是前者的5倍时,溶氧量的上升速率是后者的1.6倍。
2.2 一定通气量下不同含氧率的溶氧量研究
本实验中水体容量为80 L,对实验水体处理与上节条件相同,通入气体量恒定为5 L/min,通气方式为两支路通气,其中一支路通入空气,另一支路通入纯氧气体。空气中氧浓度为20%,因通气量较小,在此空气与氧气视作同特性气体。两支路通过节流阀门控制气体流量。通入气量分别为5 L/min空气,2.5 L/min 纯氧和 2.5 L/min 空气,5 L/min 纯氧。折合氧浓度分别为20%,60%,100%。利用溶氧仪测定循环曝气至饱和溶氧状态,这一过程中不同时间下的溶氧值,如图3所示。
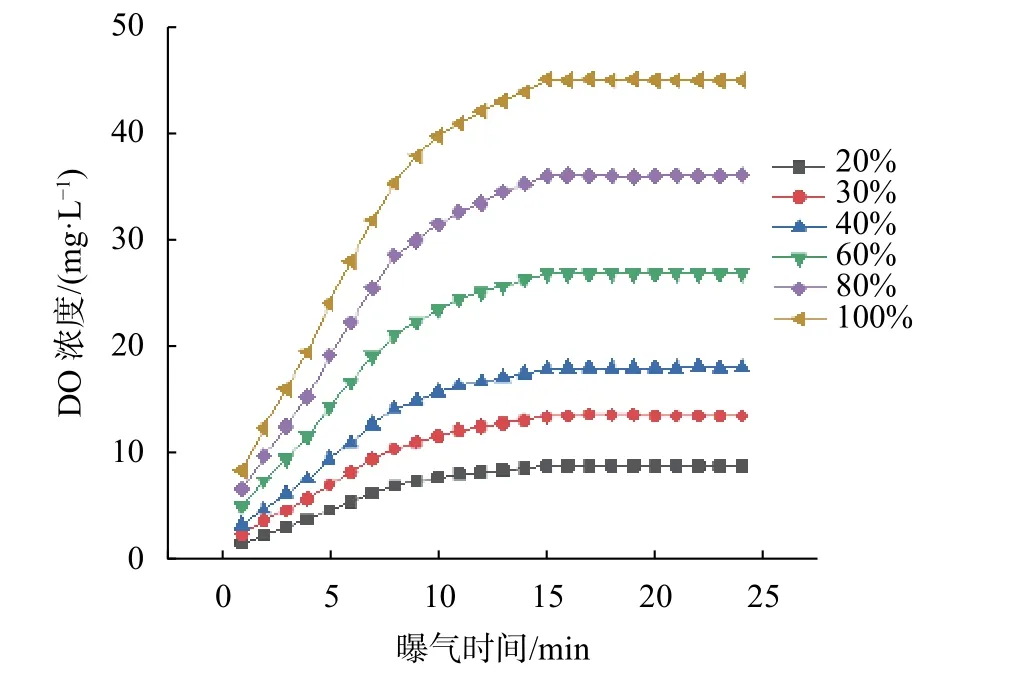
图3 通气含氧率的大小对溶氧值的影响
可以看出氧浓度含量越高,达到的饱和溶氧量越高,并且饱和溶氧量与通入气体含氧率成正比,3种通入气体含氧率为1∶3∶5,测定的3个饱和溶氧量的比值为1∶2.8∶4.8,基本呈相关正比关系。与上节的实验相比较,通入纯氧是较好的。通过查阅相关文献可知自吸泵的特性,泵内压力会随通气量的增大而减小,且通气量的变化能较大程度影响泵的压力与流量。
2.3 动态增氧条件下不同进水量下的溶氧值
进行曝气试验之前,用化学试剂将曝气池以及温室蓄水池溶氧量降低为0 mg/L。这样得到的试验数据比较可靠直观。本研究的目的是在动态增氧的条件下,边进水,边增氧,边出水,以期达到目标溶氧值的过程。由此可知自吸泵进水量也可以影响溶氧效果。通入气体为纯氧,曝气水箱为6 L,且通气量恒定为5 L/min时,把进水量的值分别设定为22 L/min,18 L/min,14 L/min,12 L/min,根据即时采样,即时测量的准则,静置几分钟,待抽取的溶氧水体状况稳定时,使用溶氧仪测定出水管道末端的溶氧值,经过一段时间后不同进水量下达到的饱和溶氧值结果如图4所示。

图4 进水量值的大小对溶氧值的影响
由结果可知,边曝气边进出水这一过程是切实可行的。并且在不同的进水量下,通气量恒定的情况下会得到不同的溶氧值。简而言之就是在通气量一定的情况下,进水量越小,得到的溶氧值就越高,进水量越大得到的溶氧值就越低。
2.4 系统中控制量及相关参数的确定
综上述因素,在边进水,边曝气,边出水的控制过程中,为提高系统的响应速度,若以通气量作为控制量,增氧速率增加的不是很理想,通过比较通气量为5 L/min和1 L/min的溶氧上升速率,前者是后者的1.6倍。查阅相关资料,通气量的变化对气液泵的压力和流量影响较大,变化频繁会使得气液混合泵工作状态不稳定,影响曝气效果。若以氧气浓度作为控制量,在恒定通气量下,氧气浓度越高达到的饱和溶氧值也越高,但是考虑到溶氧效率和控制的实现简易程度,比较而言直接通入纯氧效果最好,且本文曝气溶氧控制的目的是提升控制系统响应能力,精准调控溶氧值不适合作为控制标准。最后通过调节自吸泵进水量来提高系统的响应速度,对于三相电机驱动的自吸泵可以采用变频器控制进水量,对于单相电机驱动的自吸泵可以采用调压调速器改变电压值,调节电机转速,进而控制自吸泵进水量,控制过程简单。综上所述,本溶氧控制系统的控制量确定为先通水,状态稳定时,再对曝气水箱进行循环增氧处理,以达到边曝气边出水的设计。为保证自吸泵进水能持续稳定,自吸泵的进水流量的调节范围应该在12~ 22 L/min之间。
2.5 建立相关数学模型
控制过程中的数学模型对整个控制系统响应性能至关重要。通常采用的两种建立数学模型方法为机理法和实验法。原则上采用机理法建立出数学模型是可行的,但是对于溶氧来说一般是物料平衡的过程,参考前人做的研究还与曝气水深温度等直接相关,解析法获得的动态特性比较复杂,且这种工程问题,通过现场实验测试的也就是辨识的方法获得动态特性更加符合实际。由此可以将过程控制看作为一般工业过程,将其简化为一阶惯性加滞后环节,即常规一阶纯滞后传递函数。

将气液混合泵的通气量与自吸泵的进水量之比作为输入控制量,其中前者为定值,通气量为5 L/min,将溶氧值作为输出反馈量。通过对2.3节的曝气过程进行阶跃响应建模,得到下列参数值,R=75,T=19,=10。因为 τ /T ≈0.52>0.5,由此可以看出该控制是一个大时滞过程。
3 TDF-IMC-PID控制系统的设计
根据经验建模的方式建立的灌溉水体增氧的数学模型,受到水体因素和环境因素的波动会导致实际动态模型和建立的模型出现偏差,这种情况是模型失配。建立的一阶纯滞后曝气模型的比例系数,惯性系数和滞后时间在模型失配的条件下更容易受到干扰,常规的IMC-PID控制方法会出现系统抗干扰能力下降。本文提出在IMC-PID控制系统中的反馈中再加入一个内模控制器,这样构成二自由度的IMC-PID控制结构,称为TDF-IMC-PID。这两个内模控制器再协同作用下可以提高系统的抗干扰能力。TDF-IMC结构框图如图5所示。

图5 TDF-IMC-PID结构图
TDF-IMC-PID控制器可以对两个参变量进行调节,可以增强控制系统的跟踪性能和抗干扰能力。常规PID整定3个参数的过程是繁琐的,对于TDFIMC-PID中的两个参数的整定也是相对困难的,由于这两个参数之间相互影响且相对灵敏,通常需要多次的整定才能达到较理想的控制效果。其中G(s)为被控制对象的实际模型,M(s)为内部过程模型,P1(s)和P2(s)为二自由度内模控制器,R(s)和Y(s)分别为系统的输入和输出,D(s)为干扰量。将二自由度内模控制结构图转换为二自由度PID控制,如图6所示。

图6 TDF-IMC等效PID图
C1(s)和C2(s)分别为设定值滤波器和调节器,以此形成二自由度内模控制。

由此可以看出P1(s)和P2(s)对TDF-IMC-PID的控制性能有直接影响,其中P1(s)为目标跟踪控制器,P2(s)为抗干扰控制器。根据上一节关于内模控制器的设计步骤,可以得到二自由度内模PID控制器:

系统中P1(s)和P2(s)的设计方法为,内模控制器中的两个滤波器f1(s)和f2(s)可以使系统的目标跟踪性能和抗干扰性能更佳,其表达式为:

其中滤波器的阶数β与M(s)的阶数相等,故β=1。所以对于二自由度内模PID的控制性能,需要调节的参数为滤波器参数a1和a2。


将式(8)和式(4)及式(5)代入式(2)和式(3)可得
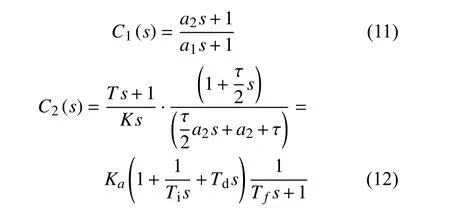
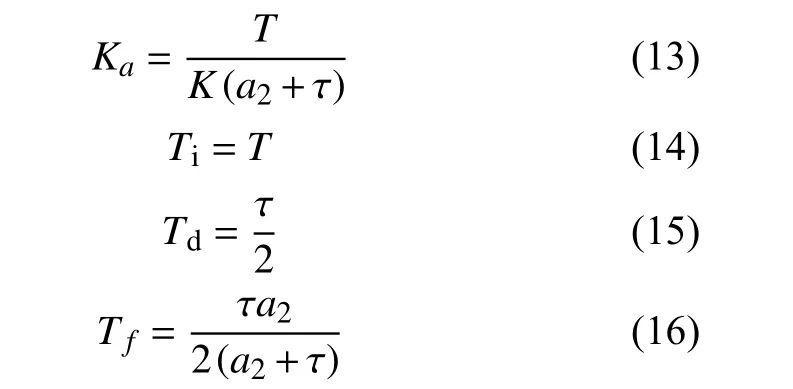
由式(12)可知,可以将控制器C2(s)等效为滤波器和一个PID控制器串联。其中:
4 基于PSO算法的TDF-IMC-PID控制
根据TDF-IMC-PID的结构特性,有以下整定原则,其中对于参数a1的取值倾向于提高系统的响应速度和稳定性,参数a2的取值倾向于增强系统的干扰衰减和鲁棒性能,两参数具有很强的相互影响性,常规试凑整定法存在较大的盲目性。经过PSO粒子群优化的TDF-IMC-PID算法的结构框图如图7所示。

图7 PSO-TDF-IMC结构图
针对上述现象提出基于PSO算法的二自由度内模PID控制,此算法以ITAE为目标函数,根据群体搜寻和个体搜寻不断地变更自己最新的位置和速度,以此来优化参数a1和a2,从而解决了常规整定中参数优化的困难问题。
PSO算法是一种仿生粒子群体迭代算法,这种算法需要整定的参数较少,不存在交叉和变异过程。所以收敛速度较快,主要通过迭代方式实现算法,PSO算法首先要对一群粒子初始化,在粒子的速度不断更新迭代中找到最优解。在每次粒子群更新迭代的过程中,粒子群在迭代中会出现两个极值,个体的最优解和群体最优
其中迭代公式为:
经过不断地迭代运算比较,最终得到群体最优值gbest,将得到的2个参数代入到控制器中进行计算。
很多仿真运算都表明,对于存在时滞性较大的系统,可以把ITAE指标作为优化对象的目标函数。选取的目标函数为:
根据PSO的算法流程如图8所示,本系统算法实现的具体步骤如下:

图8 PSO粒子群算法流程图
1)种群数量初始化m=50,由于需要对两个参数优化整定,所以粒子的维数j=2,对于常量参数C1=C2=2,最大迭代次数n=40,为随着迭代次数线性递减,递减公式为

2)将初值代入PSO算法中得到不断更新的位置和速度,根据适应度函数J,找到最新的个体的最优解,并且与群体最优解相比较,如果当前的个体极值比上一代的群体最优解更合适,则替换为最新的群体最优值。
3)根据算法流程,粒子在空间中不断地更新个体以及群体最优解,直到在迭代过程中找到最优解。
5 算法仿真结果分析
为了验证控制策略的有效性,以建立的相关数学模型为研究对象,在Simulink软件平台上进行仿真,为了研究不同控制算法整定PID参数对溶氧浓度控制效果,在Simulink平台上对本文的控制方案进行了仿真研究,分别对不同控制方法的响应效果进行分析,尤其是对利用PSO粒子群算法对TDFIMC-PID控制中的两个参数的整定过程进行研究。根据仿真的阶跃曲线响应情况得到不同控制方案的优缺点。对常规PID,IMC-PID,TDF-IMC-PID,三者均采用PSO粒子群算法进行参数优化。
在数学模型参数合适时,根据Simulink中搭建好的模型,不同控制策略下对参数的整定结果如表1所示。

表1 不同控制策略下的参数整定
在实际的控制过程中,会受到温度以及管道老化带来的扰动,所以有必要对抗扰动能力分析。在t=80 s时添加一个幅值为2的阶跃扰动,见图9。
根据上述3种控制策略的阶跃响应曲线可以得出,基于PSO算法的TDF-IMC-PID控制方案的效果为最佳,达到稳态的时间在3种策略最短,在48 s左右,产生的超调量也最小,系统在达到稳态之后在受到扰动后也可较快地达到平衡值。IMC-PID的阶跃响应能力与TDF-IMC-PID保持一致,无明显差别,相比之下常规PID控制会产生较大超调,且最终达到稳态的时间在62 s左右。在受到阶跃扰动时,这3种方案的具体控制效果也如图9所示,

图9 标准条件下和受到扰动后的阶跃响应曲线
TDF-IMC-PID重新达到稳态的响应时间最短,且无超调出现,IMC-PID重新达到稳定状态的时间次之,常规PID重新达到稳态的时间最长,且出现了超调。
对于实际溶氧过程,建立的数学模型不是固定的,也就是所谓的模型失配。基于这种现象有必要对系统的鲁棒性进行检验。T增加10%和滞后时间增加10%。依次按照上述参数,建立新的传递函数。在模型失配的传递函数下控制的阶跃响应结果如图10所示。
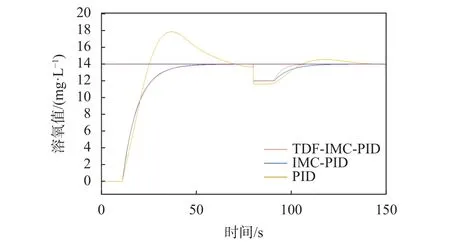
图10 参数摄动条件下和受到扰动后的阶跃响应曲线
以上结果表明,在模型失配的情况下,TDF-IMCPID控制方案的效果为最佳,IMC-PID和TDF-IMCPID同样表现出了良好的稳定性和鲁棒性,即超调量最小,响应时间最短,抗干扰性好,依旧表现出了良好的稳定性和鲁棒性。常规PID控制在模型失配下,出现了较大的超调,系统达到稳态的时间也变得更长。在受到与上节同样的阶跃干扰时,TDFIMC-PID在短时间内就能恢复平衡状态,IMC-PID达到稳定的时间较长,但是产生的超调量小,而常规PID出现了较大的超调,且控制过程不稳定。由上述可知,TDF-IMC-PID可以改善系统的目标跟踪性能和抗干扰性,和常规内模控制只能调节一个参数相比,二自由度内模控制提高其中一种性能不用去降低另一种性能,两者都可以通过调节不同的参数达到最优。以上结果充分表明了基于PSO算法的优势。
本系统中对自吸泵进出水量的控制,主要由调压调速控制器调节电机转速,从而调节进水流量。从控制角度来看,自吸泵进水量和气液泵通气量的比值对控制效果有决定性影响。3种控制方式下阶跃响应过程中控制量的变化情况见图11~ 图13。

图11 IMC-PID下的输入控制量的变化曲线

图12 TDF-IMC-PID下的输入控制量的变化曲线
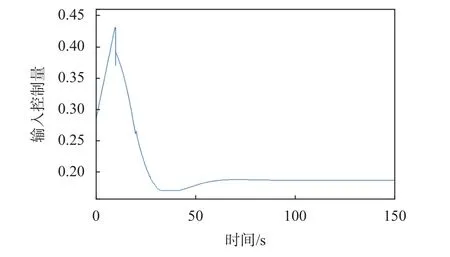
图13 PID下的输入控制量的变化曲线
从结果可以看出常规PID下的控制阶跃调节,进出水量与进气量比值变化幅度较大,因为调压调速器调节水流量存在一定滞后性,这样剧烈波动不利于控制的稳定,而TDF-IMC-PID和IMC-PID均调控平稳,从设备性能角度来看,更有利于控制的实现。
6 控制系统应用及仿真验证
本系统选用西门子S7-200系列PLC为工作平台,测试主出水管路末端的溶氧值,然后转化为标准的4~ 20 mA的信号上传到PLC的模拟量输出模块,经过OPC协议将实时数据送入到Matlab工作区,经过Matlab内的基于PSO算法优化的TDFIMC-PID控制器处理,得到溶氧控制系统所需要的相关参数。然后将结果通过OPC协议送回到PLC,经过模拟量输出模块输送到调压控制器,进而调节自吸泵的电压来改变进水的流量。考虑到水管沿路溶氧损失以及其他因素影响,通入气体为纯氧,水体温度为20 ℃,目标溶氧值为14 mg/L。监控由上位机实现,具体WINCC组态软件实现监控,主要针对灌溉水DO浓度,调压调速自吸泵流量控制器等的监控和相关参数初值的设定以及现场各种阀门和机器的启停控制的功能。
本控制系统已经在新疆和田县和谐新村日光温室应用,此日光温室为蓄水池供水,稳定运行状态时溶氧检测值持续稳定在14 mg/L上下,满足增氧灌溉的需求。
7 结束语
本文针对溶氧过程中存在的时滞问题设计的TDF-IMC-PID控制器,相较于常规PID控制而言,前者在系统响应达到稳态的过程中超调量小,且系统达到稳态的时间更短;在模型失配和受到干扰的情况下,常规PID的控制效果出现较大波动,前者表现出了良好的稳定性和鲁棒性。TDF-IMC-PID和IMC-PID在模型失配和标称条件下,控制效果相同,但是在受到干扰的情况下,前者能更快地重新达到稳态。针对TDF-IMC-PID的两个参数在采用传统试凑法时不易整定的问题,引入PSO粒子群算法可以快速整定参数,从而使系统较快地达到动态溶氧饱和值。相比于常规PID,TDF-IMC控制下的系统达到溶氧设定值的过程更为平稳,使得自吸泵的流量调节控制平稳可靠,且有利溶氧仪的跟踪监测。