基于动态规划的PHEV能耗分析
2021-09-09张盟阳
张盟阳
(长安大学 汽车学院,陕西 西安 710064)
引言
日益严重的能源与环境问题使新能源汽车的研究受到更多的人关注。插电式混合动力汽车(PHEV)有良好的续航能力,补充燃料与充电方便,在市场上广受欢迎[1],成为新能源汽车过渡时期的重要产品。在行驶过程中合理利用PHEV的多个动力源使其能耗最小是研究人员的工作重点。在多种能量管理策略中,规则性策略在功率分配过程中有极大的浪费;全局优化算法如:动态规划(DP)[2]、凸优化(CP)[3]等不能实时使用,瞬时优化策略需要大量数据训练,仍在不断优化。局部优化策略[4]在预测时易受外界干扰。动态规划作为经典优化策略,在此基础上发展出多个实时规则控制,得到广泛使用。
本文针对一款PHEV,基于动态规划算法,针对不同行驶里程,仿真分析能耗结果。
1 插电式混合动力车模型
整车动力系统结构如图1所示,发动机与ISG电机组成的EGU单元与动力电池为整车动力源,因此PHEV有多个工作模式。EGU开启时刻、EGU开启次数以及EGU输出功率与需求功率比值决定了PHEV的工作模式,同时也是功率分配的重点研究内容。
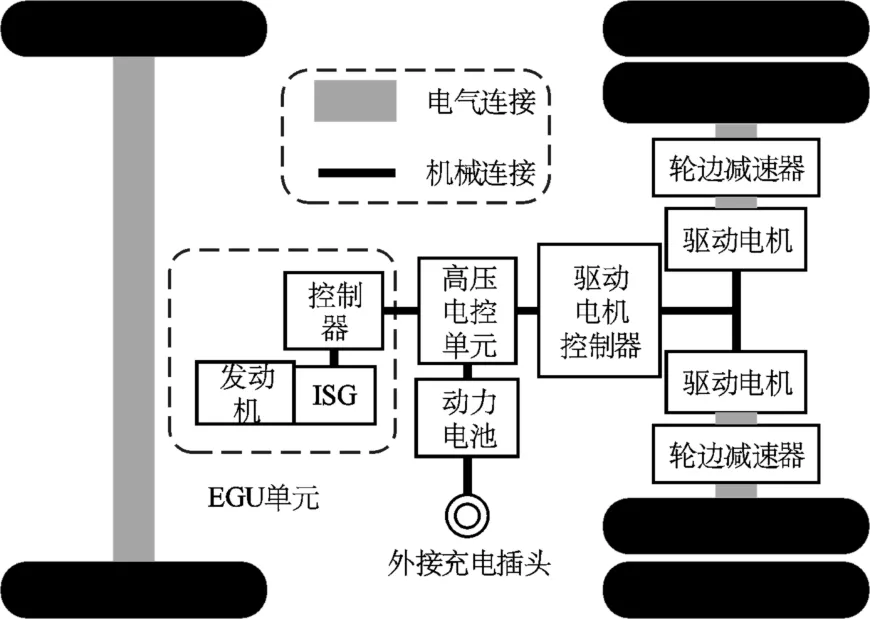
图1 整车动力系统结构图
功率分配过程中功率平衡方程如下:

式中:η1为驱动电机效率;Paux为整车附件消耗功率;Pb为动力电池输出功率,为保护电池,限制电池最大充电功率为-30kW;Pegu为EGU单元输出功率。
整车质量为14 500 kg,车身长12 m,减速器减速比为13.5,动力电池选择总电压为537.6 V,电池容量为180 Ah的磷酸铁锂电池,发动机以天然气为燃料,最大输出功率为88 kW。
2 动态规划算法
动态规划是逆向寻优的全局优化算法,可以寻找目标函数最小值,目标函数包括天然气费用和电费,如下所示:

式中:J为行驶总能耗成本;i为当前时刻;N为工况长度;Ce,Cf分别为电价与天然气单价,分别取值0.8元/kWh和3.8元/m3;Pbat,i为当前时刻电池组消耗功率,是电池输出功率与电池组电流的函数;mf,i为当前时刻燃油消耗量,是EGU单元输出功率函数。
动态规划计算时选择电池荷电状态(SOC)为状态变量,控制量为电池输出功率,EGU输出功率,在当前系统中,独立的控制变量只需选择电池输出功率,逆向寻优计算公式如下:
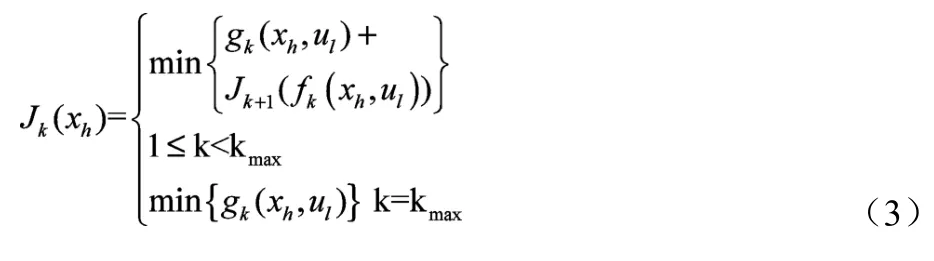
式中:k为时间(运行工况);kmax为行驶工况长度;xh为各离散SOC状态;ul为状态转移变量,即离散的电池功率序列;Jk(xh)为在k时刻,SOC状态为xh时,到PHEV工况结束且SOC到达下限值的最优总能耗;gk(xh,ul)为在k时刻,SOC状态为xh,电池功率为ul时,k时刻的单步能耗成本;fk(xh,ul)=xk+1,xk+1为k+1时刻的SOC状态,满足此时SOC不得超出设置的上限值与下限值;Jk+1(Jk(xk,ul))=xk+1为k+1时刻,SOC状态为xk+1下的最优总能耗成本,若xk+1超出SOC范围,该值取为惩罚项α=0.05。
计算时需满足多个约束条件:
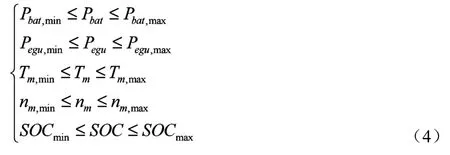
式中:Tm为电机转矩;nm为电机转速;SOCmin为SOC下限值0.3。SOCmax为SOC上限值1。
3 DP与CD-CS仿真分析
CD-CS策略在电量消耗阶段只利用动力电池一个动力源,在SOC到达下限值0.3后,EGU开启,输出恒定功率,此时为电量维持阶段,选择燃油消耗率最低的40kW作为EGU恒定输出功率,同时设置电量维持阶段上限值为0.35,保证充分利用电池电能,重复这两个过程,直到PHEV工况结束。
11个CCBC条件下SOC轨迹变化如图2(a)所示,EGU 输出功率如图2(b)所示。
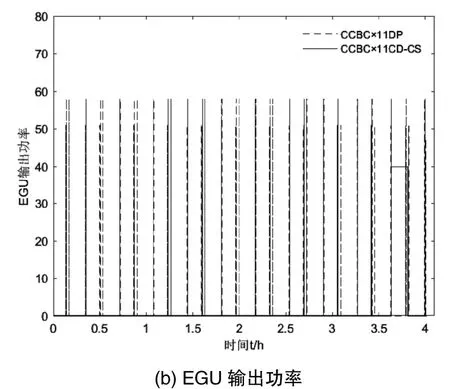
图2 11个CCBC工况下DP与CD-CS仿真结果
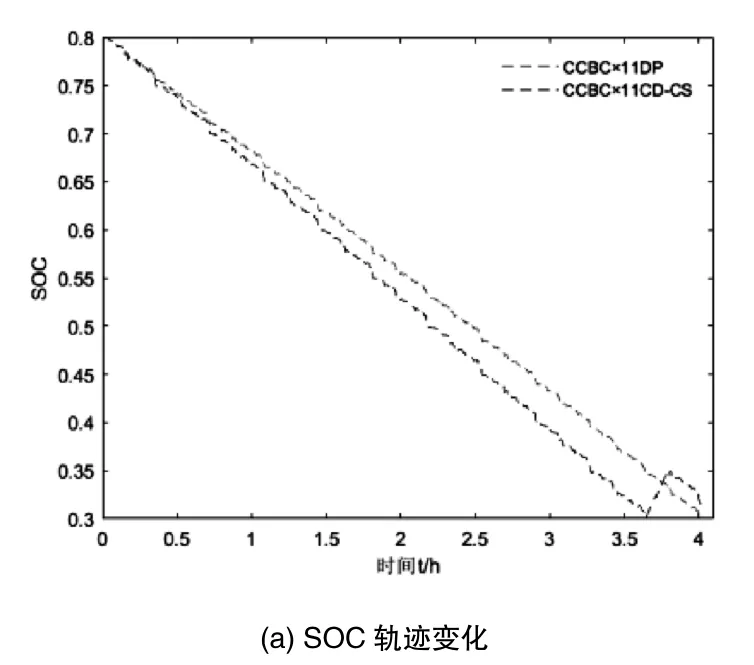
由图2中SOC变化轨迹可以看出,DP计算所得的90%以上的SOC值要高于CD-CS仿真所得SOC,仅在工况将要结束的时间附近,DP计算SOC低于CD-CS仿真结果。因为DP从全局角度考虑,为了充分利用电能,使SOC末值到达0.3,EGU在整个工况下开启,CD-CS策略下的EGU仅在电量维持阶段开启,因此DP计算所得SOC值较大。CD-CS策略SOC末值都高于0.3,动力电池电能没有充分利用。因此,全局优化策略DP计算所得能耗成本始终优于CD-CS仿真结果。
从EGU输出功率来看,DP仿真结果EGU开启次数为323次,CD-CS策略下EGU开启次数为613次。DP策略小于CD-CS策略下EGU开启次数,因此DP可以充分利用动力电池电能。
4 不同里程仿真分析
为分析动态规划能耗计算结果,在不同里程条件下,在SOC初始值为0.8,SOC下限值为0.3条件下,分别对11、13、15个中国城市公交工况(CCBC)循环仿真计算总能耗,并与恒温器控制策略(CD-CS)进行对比,分析节能效果。
13个CCBC条件下SOC轨迹变化如图3(a)所示,EGU输出功率如图3(b)所示;15个CCBC条件下SOC轨迹变化如图4(a)所示,EGU 输出功率如图4(b)所示。
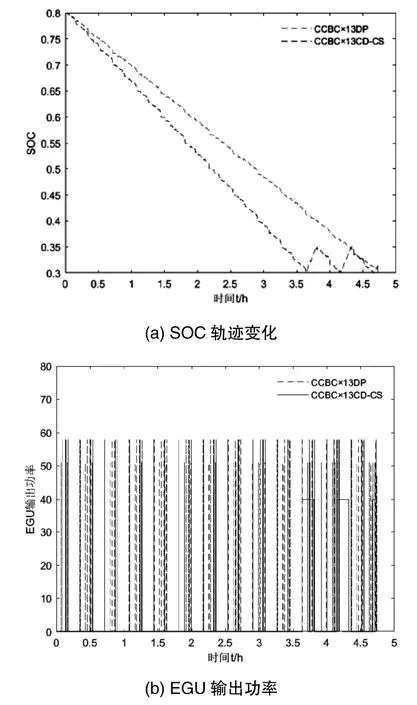
图3 13个CCBC工况下DP与CD-CS仿真结果
由图2-图4中SOC轨迹变化可以看出,在不同的里程条件下,CD-CS控制策略SOC轨迹变化相同,首次到达SOC下限值0.3的时间也相同。里程的增加只是延长了电量消耗与电量维持两个阶段的时间,DP在不同的里程条件下始终保证功率分配满足全局最优,SOC直到最后时刻到达SOC下限值。
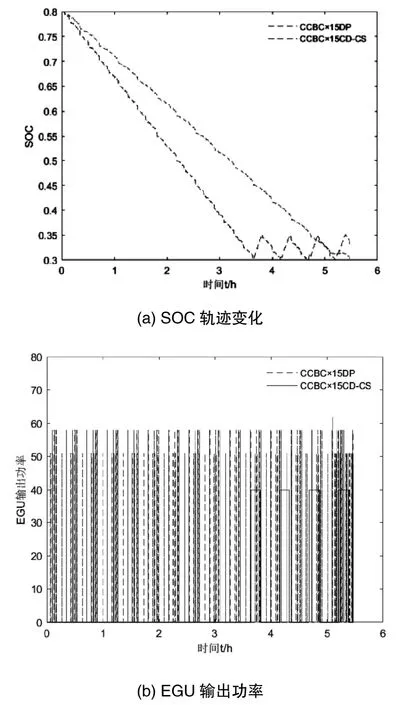
图4 15个CCBC工况下DP与CD-CS仿真结果
定义EGU开启次数差值为CD-CS策略下EGU开启次数比DP策略EGU多开启的次数。随着里程的增加,EGU开启次数差值从290次增加至926次。EGU开启次数差值逐渐增加,因此,随着里程的增加,消耗的天然气量的差值越来越大,DP节约成本就越多。
能耗结果如表1所示。随着里程的增加,DP比CD-CS的总能耗减少量从1.08元增加至3.06元,减少的百分比从2.38%提高至4.54%,节能效果越来越好。因此,随着里程的增加,DP比CD-CS减少的能耗成本更多,DP节能效果随着里程的增加变得更好。
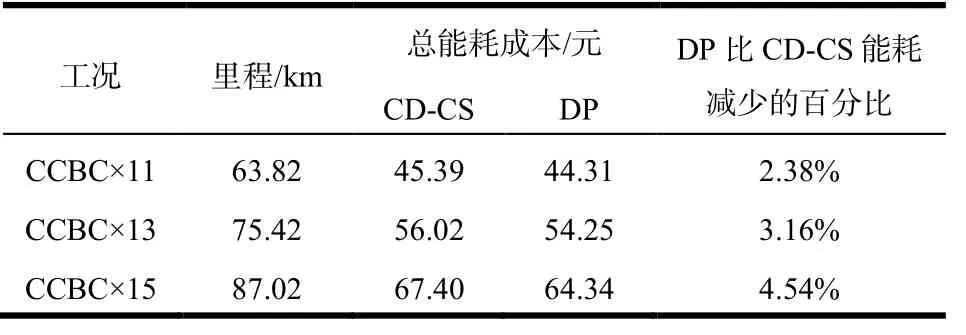
表1 不同里程能耗结果
5 结论
在不同里程下仿真计算,结果表明:
(1)DP计算总能耗成本都比CD-CS策略计算总能耗成本要低,EGU开启次数在整个工况中均匀分布,充分利用了电能,证明了动态规划算法的节能效果明显。
(2)随着里程的增加,EGU开启次数差值越来越大。DP计算成本比CD-CS计算成本减少量逐渐增加,DP节能效果越来越明显。
(3)本文仿真过程中未考虑电池寿命老化成本,在下一步研究中需要加以完善。
