面向全自动运行系统的ATP 自动过分相关键技术研究
2021-09-08李晓刚吕文龙贾庆东
李晓刚,吕文龙,贾庆东
(1.北京市轨道交通建设管理有限公司,北京 100068;2.城市轨道交通全自动运行系统与安全监控北京市重点实验室,北京 100068;3.交控科技股份有限公司,北京 100070)
0 引言
统计显示,截至2020 年5 月,中国大陆地区共有4座城市的10 条城市轨道交通运营线路采用全自动运行(fully automatic operation,FAO)系统,运营线路里程达209.43 km;10 座城市的39 条城市轨道交通在建线路采用FAO 系统,在建里程达1 278.08 km。 可以预见,中国大陆地区将有更多城市轨道交通新建线路及改造线路采用FAO 系统。 北京燕房线是国内首条具有完全自主知识产权的、按照全自动驾驶系统设计、开发、测试、部署的地铁线路,已于2017 年年底开通运营。 2019 年9 月,设计速度达到160 km/h、具有市域快线特性的北京大兴国际机场线开通运营。
大兴机场线是全自动地铁线路,采用高压25 kV交流供电方式,在线路区间多个位置存在供电分区[1]。为提高线路运营效率、减少运营人员的工作量、提升全自动运行的智能化水平,需要具备实现全自动列车自动防护(automatic train protection,ATP)过分相功能。
1 传统车辆过分相区方式分析
分相区指的是在交流牵引电气化区段的两个供电分区之间的接触网无电区。 接触网-受电弓-车辆-钢轨形成一个完整的电流回路。 而相邻的供电分区之间的电流方向是相反的,一个是A 相电,一个是B 相电。 如果机车车辆的受电弓同时跨接了两个供电分区,会造成两相相间短路,从而导致变电所跳闸、机车变压器击穿甚至接触网塌架等严重事故。 所以《铁路机车操作规程》中规定,严禁在分相区双弓运行,在分相区必须断开主断路器[2]。 双弓过分相短路故障如图1 所示。
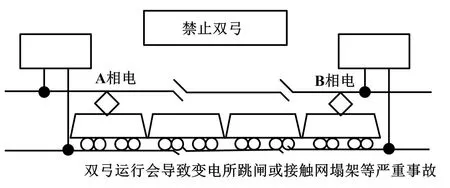
图1 双弓过分相短路故障示意图Fig.1 Schematic diagram of double pantograph passing neutral zone short circuit fault
动车组多采用通过感应地面磁钢设备确定车辆与分相区的相对位置(地面磁钢和车辆采集信号分别采用斜对称埋设和备份接收,以保证自动过分相的安全和可靠)。 车辆根据其位置自动发出过分相信号,封锁车辆牵引指令,断开主断路器;通过分相区后,自动闭合主断路器/启动牵引,从而实现车辆自动通过分相区[3]。 车辆自动过分相如图2 所示。

图2 车辆自动过分相示意图Fig.2 Schematic diagram of vehicle automatic passing neutral zone
图2 中:G1点为预告点位置,车辆接收到地面信号,进入预告模式;控制牵引电流下降至零,断开辅机系统和主断路器。 G2点为强迫断点位置,车辆接收到强迫断信号。 若按预告模式处理完毕,接收到强迫断信号失效;否则,进入强迫断模式,立即封锁牵引电机电流,并分断主断路器。 G3为恢复点1,G4为恢复点2。 “恢复1”“恢复2”信号都可以使系统进入恢复模式,发出“合主断”指令,并控制辅机系统重启和恢复牵引电机电流。
除此之外,动车组可通过装备车载ATP 设备实现自动过分相。 国内通常有以下3 种方式。
①ATP 控车并处于C2 等级时,通过接收地面应答器中的分相区信息,输出过分相禁止信号和过分相控制信号,以实现自动过分相。
②ATP 控车并处于C3 等级时,通过接收无限闭塞中心发送的分相区信息,输出过分相禁止信号和过分相控制信号,以实现自动过分相。
③在ATP 切除状态下,通过车辆上的感应接收器接收地面磁钢定位信号,确定动车组与分相点的相对位置,以实现自动过分相[4]。
综上所述,动车组过分相时,在无信号系统参与情况下,车辆通过固定的磁钢过分相。 在信号系统参与情况下,车载ATP 通过地面应答器或无限闭塞中心信息实现自动过分相。 但是信号系统两种过分相方式中,车辆与信号系统交互彼此状态信息有限,各自独立完成。 在发生信号系统未输出过分相或无效输出时,需要立刻人工介入,切换人工过分相维持运营[5]。 司机需要在每次过分相时,通过显示屏实时关注信号系统的过分相情况,以便随时介入。 另外,采用自动过分相装置时,如果在切断牵引时车辆速度较低,极有可能发生车辆惰行停在分相区无电区内的情况。 若发生这种情况,则需由司机向控制中心汇报,由调度人员协助进行分相区供电,倒切车辆受电弓,从而实现车辆再次启动。 这种方式操作复杂、耗费人力且影响行车效率。而在全自动运行中,车辆通过分相区时,司机可能未在车辆或司机室内,如发生上述过分相失败,会降低全自动运行的可靠性和可用性。
2 全自动运行系统自动过分相分析
在全自动运行系统条件下,车辆运行过程中可能无司机值守。 而分相区设置在区间,如发生停在分相区事件,会大大降低全自动系统的可用性。 相对于有司机值守运行车辆,全自动运行情况下的分相区救援时间更长、影响范围更广,使安抚故障车辆乘客的难度更大。
在车辆ATP 自动过分相基础上,针对全自动运行系统需要进一步优化车辆自动过分相功能,实现车辆全自动运行过程中的分相区位置校正、分相区车辆入口速度控制,以及结合车辆移动授权控制,保证车辆自动通过分相区,避免车辆带电过分相区或在分相区停车的情况,从而提高全自动系统的可用性、减少因分相区失败而救援的次数。
综合考虑全自动系统特点及自动过分相区的功能,需要重点关注以下内容。
①结合车辆性能参数、网络传输延迟、线路和分相区参数,确定用于分相区入口及出口位置的应答器设置地点,进行车辆接近及离开分相区的位置校正。
②通过一套计算方法,确保车辆惰行通过分相区的入口速度、出口速度,保证车辆自动通过分相区,避免车辆停在分相区内。
③根据确定的入口速度,计算允许的车辆启动位置,确定分相区防护信号机的设置地点。
3 自动过分相的流程分析
分相区前,车载信号通过当前位置、速度和网络通信状态等元素进行判断,向车辆发送过分相使能,使车辆网络系统确认使用信号系统过分相功能;否则,网络会忽略信号系统发送的指令,倒切为采用地面磁钢过分相功能。 基于此,可实现无需司机参与,信号系统过分相功能和磁钢过分相功能自动倒切的全自动系统过分相,使磁钢过分相功能作为信号系统过分相的后备功能,提高整车过分相的可靠性和可用性。
信号系统自动过分相流程如下。
首先,车载ATP 通过地面应答器确认车辆位置,判断即将到达分相区,向车辆持续发送ATP 自动过分相使能信号。 仅当车载ATP 设备判断满足以下所有条件时,方可向车辆发送“ATP 自动过分相使能信号”;否则,禁止向车辆发送该信号。 车载ATP 判断发送使能信号的条件为:车辆当前模式在点式、基于通信的列车控制(communication based train control,CBTC)系统或FAO 模式;车辆运行速度高于过分相最小入口速度;车载ATP 与车辆通信正常。
其次,车辆网络[6]根据收到的ATP 自动过分相使能信号,向车载ATP 系统反馈其接收状态。 车载ATP在判断其过分相使能有效和车辆准确接收到使能信号后,会向车辆发送ATP 自动过分相指令。 车辆网络收到此信号后,开始降负载,断开主断路器,完成车辆过分相前准备[7]。 注意:若车辆持续超过一定时间(一般为1 s,可配置)未反馈接收到过分相使能,则车载ATP 立即撤销ATP 自动过分相使能信号且不会发送过分相指令。 后续由车辆网络直接通过轨旁磁钢自动过分相区。 最后,车载ATP 在过分相区过程中,会主动控制切除车辆牵引,维持车辆惰行,实现配合车辆通过分相区。 车载ATP 通过地面应答器确认车辆已经离开分相区指示位置,车载ATP 立刻撤销ATP 自动过分相使能信号及ATP 自动过分相指令,恢复正常控车输出继续运营。
ATP 自动过分相流程如图3 所示。
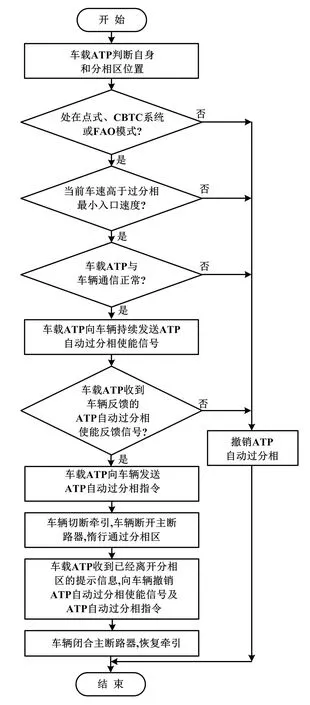
图3 ATP 自动过分相流程图Fig.3 Flowchart of ATP automatic passing neutral zone
4 自动过分相的关键技术分析
4.1 分相区位置校正
在正向和反向即将到达分相区入口处的适当地点,设置用于校正分相区位置的无源应答器,使车载ATP 校正当前位置。 应答器位置应考虑到车载ATP处理应答器报文的延时、丢失应答器的位置误差、信号系统与车辆列车控制监控系统(train control monitor system,TCMS)的通信延迟时间、车辆反馈时间以及车辆可能的运行速度等因素。 根据以上因素计算得出的距离值还需累加轨旁预告点G1的位置,从而实现信号系统过分相使能提前于磁钢信息发给车辆网络。
在正向和反向已经离开分相区出口后的适当地点,设置用于校正分相区位置的无源应答器,使车载ATP 确认已离开分相区范围。 出口处应答器设置位置应保证车尾已出清分相区。
4.2 分相区入口速度及出口速度控制
在正向和反向进入分相区之前设置信号机。 此信号机与分相区之间的距离应满足车辆在该信号机前方停车再启动后,车辆到达分相区起点时的车辆速度。该设计能够保证离开分相区终点时,车辆仍能具备一定的运行速度,避免车辆分相区内惰行至停车,造成分相区救援。
4.3 移动授权控制
为避免车辆过分相时停在无电区内,车载ATP 需将车辆移动授权与分相区位置匹配。 移动授权终点不得落在分相区内。
在CBTC 级别计算移动授权时,应保证分相区有车占用情况下,移动授权不允许越过分相区防护信号机;仅前方车辆出清分相区且距离分相区末端距离大于一定值时(一般考虑一列车辆长度),方可将移动授权越过分相区。
后备级别下,按后备进路模式进行防护,即进路完全空闲时方可开放分相区防护信号机。
分相区车辆移动授权如图4 所示。
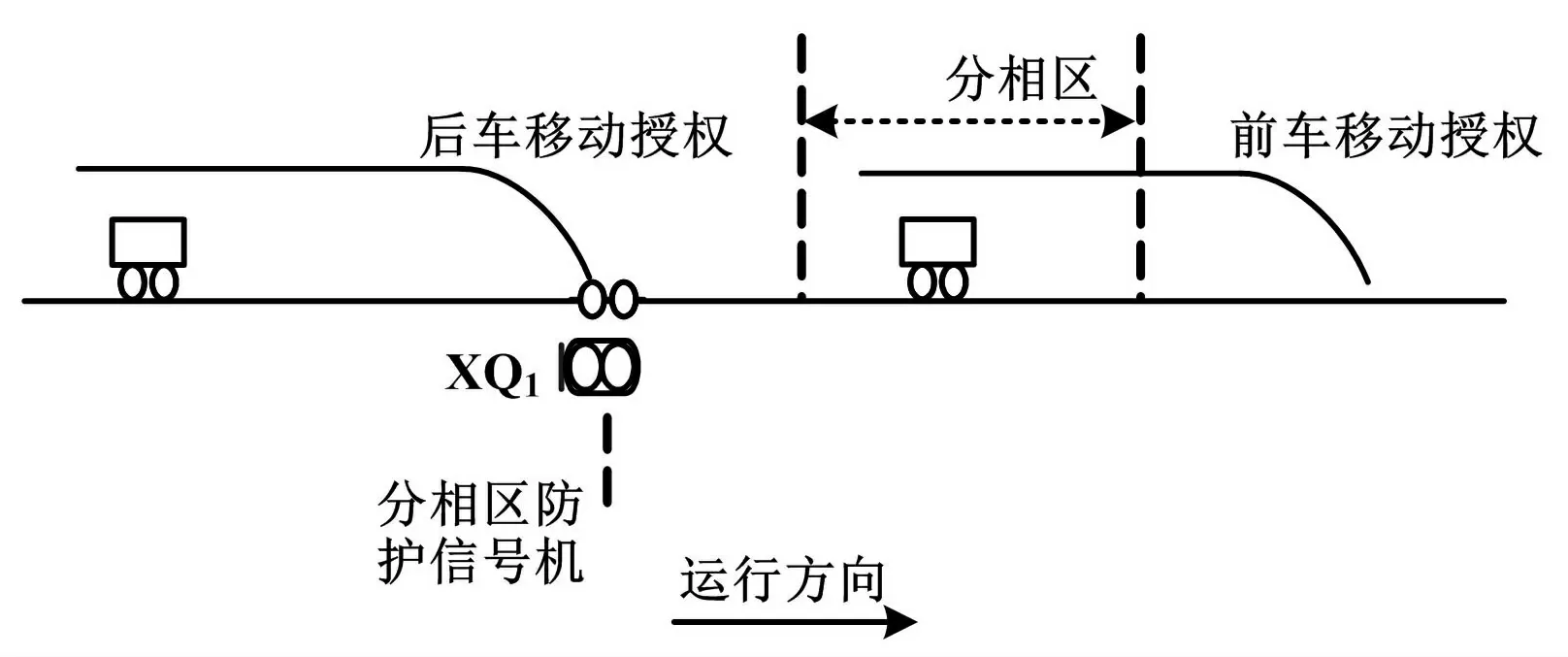
图4 分相区车辆移动授权示意图Fig.4 Schematic diagram of vehicle movement authorization in neutral zone
4.4 信号系统轨旁设备配置
下面将对结合上述流程和关键点分析,对全自动运行系统车载ATP 自动过分相的轨旁设备布置原则进行阐述。
ATP 自动过分相的双向轨旁设备布置如图5所示。

图5 ATP 自动过分相的双向轨旁设备布置示意图Fig.5 Schematic layout diagram of two-way trackside equipment layout for ATP automatic passing neutral zone
分相区防护信号机及计轴:在正向和反向即将到达分相区起点处的S 信号机距离处,设置分相区防护信号机和计轴[8],保证车辆移动授权与分相区位置匹配,并满足车辆自动过分相区的入口速度及出口速度要求。
分相区入口位置校正应答器:在正向和反向即将到达分相区入口处的S 预告距离处,设置用于校正分相区位置的无源应答器;由车载ATP 进行位置校正,并根据位置发出ATP 自动过分相指令。
分相区出口位置校正应答器:在正向和反向已经离开分相区出口后的S 出口距离处,设置用于汇报分相区位置的无源应答器;车载ATP 进行位置校正,并根据位置发出撤销自动过分相区指令。
通过上述全自动运行系统ATP 自动过分相的轨旁设备布置,结合ATP 系统流程和关键点设计,可实现ATP 控制车辆自动通过分相区,以及ATP 控制无效时自动倒切磁钢过分相功能。 该设计可避免车辆带电过分相区或在分相区停车的情况。
5 自动过分相技术的应用前景
全自动运行系统新增的过分相功能对既有信号设计原则提出了更多、更复杂的要求。 只有在系统功能开发与轨旁信号设备布置配合到位、思路一致的条件下,才能整体保证全自动运行系统功能的准确性和稳定性。 本文提出的全自动运行系统ATP 自动过分相解决方案,可有效提高带分相区的全自动系统的可靠性和可用性,可推广应用于有分相区的全自动运行线路中。 需要特别说明的是,由于城市轨道交通不同线路车辆性能[9]及线路参数不尽相同,在实际应用中需对相关参数进行校核确认,并考虑一定裕量,从而得出适应实际工程的全自动ATP自动过分相实施方案。
6 结语
本文研究了适用于具备分相区的城市轨道交通全自动运行系统ATP 自动过分相的解决方案,并对ATP自动过分相的流程、关键点、配置原则等内容进行了阐述。 通过轨旁信号设备布置、车载ATP 系统功能和车辆网络相结合的方式,实现在车辆运行过程中提前进行分相区使能确认,并保证车辆到达分相区之前具备一定速度,从而实现车辆自动惰行通过分相区,避免车辆带电过分相区或在分相区停车的情况。 全自动运行系统ATP 自动过分相的应用降低了司机和调度人员的工作强度,并提高了乘客舒适度,提升了全自动系统过分相区的可靠性和可用性。
