工业机器人用交流永磁同步伺服电动机设计分析
2021-09-08王霖,胡晓
王 霖,胡 晓
(广州数控设备有限公司,广东 广州 510530)
工业机器人主要包括本体、伺服系统、减速器、控制器四大关键部分,电机作为工业机器人伺服系统的关键零部件之一,已成为我国相关单位的研究热点。如中科院电工所、新松机器人、广州数控等有关单位相继开展了对关节型工业机器人用电机的研究工作,其部分产品已在国产工业机器人中得到应用。本文设计交流永磁同步伺服电动机也是立足于自动生产线需求基础上研发的,能适应相关系列的工业机器人配套使用。
1 机器人对电机的特殊要求
针对国产关节型工业机器人落后于国外、急需实现产品中高端化的需求,基于市场调研应用的常见工况作为基本工况,研究本体构件拓扑优化设计,探索负载自重比与整机刚度的优化平衡方法,考虑最大运动范围、最大负载以及负载质心偏置影响的极限工况,提升机器人负载自重比,最终结合机器人的设计参数对电机的功率、重量与整机长度等设计参数提出了更高的需求,以实现机器人轻量化设计的目的。
2 电机主要设计参数
根据研究任务的要求,本文设计一款系列化工业机器人用电机,其主要设计参数如表1所示。

表1 电机主要参数设计
在电机设计过程中,借助有限元件经过详细的理论分析,通过建模对影响电机性能的主要参数进行多次综合分析与优化,最终确定了更为精准的解算结果,满足机器人使用要求。
3 电机方案设计
本文的电机是专门为工业机器人的配套需求而开发设计,在设计中充分考虑实际生产工艺,特别是基于工业机器人基础上构建的自动化生产线,力求通过工业机器人反哺应用于电机的生产,从而促进整个生产线的效率和产品质量,使得电机和工业机器人相得益彰。
3.1 电机的设计思路
工业机器人用电机中,制动器作为一种将转子位置保持制动或紧急制动的有效机构,无励磁型失电制动器就是其中一种。使用该类型制动器电机的设计方案中,制动器在轴向上的位置位于定子负荷侧或反负荷侧、与定子并列,因其结构、电机部件的尺寸问题,电机总体长度一般较长,进而会影响机械、设备的安装尺寸。因此,从产品应用的行业及市场的反馈来看,均期望能够针对电机的总体长度进行一定程度的优化。
为响应上述需求,在参考国外同类型电机性能参数和工业机器人用电机关键技术指标基础上,结合自动化生产手段等因素,对电机各零件进行不断试验和优化,并进行整机的紧凑结构组合设计,最终设计出齿槽转矩低、转速平稳、体积小、过载能力好的电机。
3.2 电机的方案设计
为了克服电机现存的总体长度长、结构复杂、薄壁件加工难度大、成本高等技术的不足,本文设计的交流永磁同步电动机包括定子、转子、端盖、罩壳及无励磁型失电制动器,其特征在于:转子铁芯固定设置于电机的转轴上,无励磁型失电制动器位于定子反负荷侧与后端盖之间,且至少一部分与定子绕组在径向上重合;定子设置于转子外周,定子外周、转子侧端及转轴外周形成容纳空间,容纳空间可容纳无励磁型失电制动器的重合部分,定子绕组突出部最小内径与无励磁型失电制动器最大外径间存在间隙,其轴向截面结构如图1所示。

图1 电机轴向截面结构示意图
电机设计中,制动器为弹簧密闭式无励磁失电制动器,位于电机定子反负荷侧与后端盖之间,从定子反负荷侧至后端盖以底板、制动器转子、电枢板、制动器定子的顺序排列。制动器装配时,制动器转子毂通过弹性挡圈及平键紧固至转轴上,制动器装配后,制动器转子与制动器转子毂处于间隙配合状态,当制动器断电时,通过弹簧对电枢板施加压力,底板、电枢板与制动器转子之间相互接触产生的摩擦力使得制动器转子毂处于制动状态,进而使得转子处于制动状态。制动器装配后,至少部分与定子绕组在径向上重合,以实现电机整体长度在轴向上的薄型化。
本设计中,与电机径向重合部分为底板、制动器转子、制动器转子毂和电枢板,径向重合部分需保证定子绕组最小内径与制动器最大外径间存在一定间隙,并且制动器线圈及制动器定子位于定子绕组外侧,不属于电机径向重合部分。
本方案设计的电机,整机长度较同功率下制动器后置的常规方案短30mm左右,重量轻0.5kg左右。
3.3 电机的设计验证
使用Ansys Maxwell对电机磁路进行仿真建模,如图2所示,通过调整转子铁芯错极角度的手段,分析电机齿槽转矩波动率,选择最优方案,即齿槽转矩峰峰值约8.9mN.m,如图3所示,计算齿槽转矩波动率约0.045%。

图2 电机仿真模型
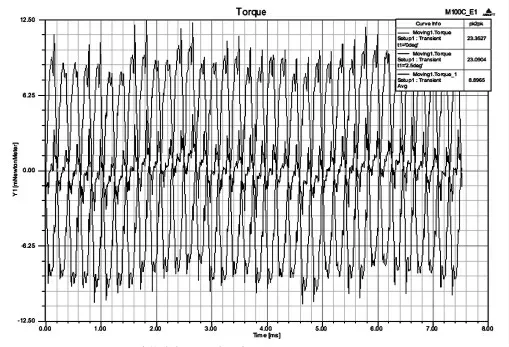
图3 齿槽转矩峰峰值曲线
确定基本磁路方案后,使用Workbench对转子结构进行建模,分析转子的振动频谱变化特征,图4为转子临界转速的坎贝尔图,在7200r/min左右时出现强烈振动,由此可知该方案的临界转速错开了电机的使用转速范围。
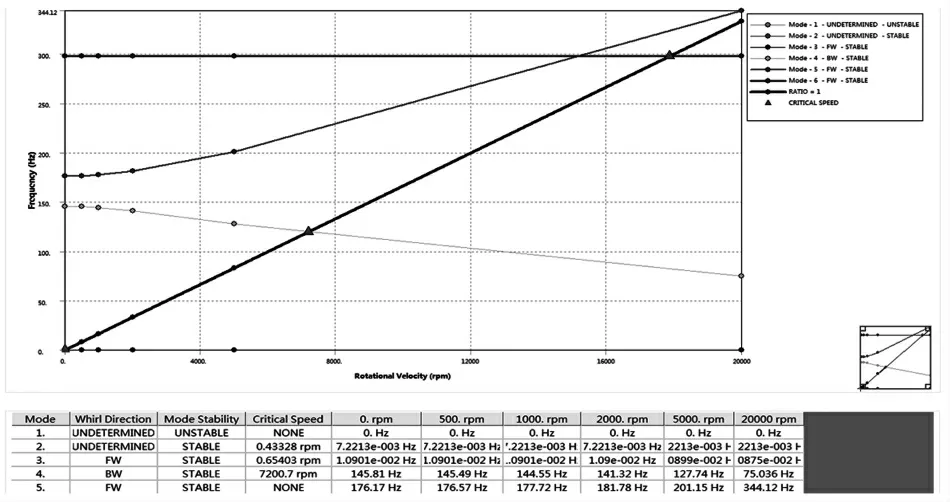
图4 转子临界转速分析(未添加端部质量块)
通过多次调整,将样机依据测试标准《JBT 11991-2014工业机械数字控制系统用交流伺服电动机》规定的测试方法进行振动、噪声、齿槽转矩测试,实测数据如表2所示。
通过表2的测试数据可以看出,样机在满足轻量化工业机器人对电机重量、整机尺寸要求的基础上,具有在输出转矩范围内具备较低的齿槽转矩波动率及振动、噪声等特点。

表2 样机测试数据对比
4 应用验证
文述电机装配的工业机器人在焊接、搬运、码垛、食品3C、协作、教育等领域均有应用示范。目前广州数控设备有限公司已经借助总线平台实现对工业机器人、数控机床、自动传送带等集成,最终实现车间智能化管理。本次设计的电机用公司型式试验测试平台,并按照公司机器人测试标准《QGZSK 20-2019 RB系列搬运机器人》进行性能测试,包括对电机的空载、负载工作特性、温升和噪声等指标进行详细测试和试验,最终测试结果表明本次设计的工业机器人用交流永磁同步伺服电动机的各项性能良好,符合自动化生产线的需求。
如RB50工业搬运机器人是公司自主研发的产品,其4、5、6轴均使用了150SJTR系列电机,而应用RB50机器人的某公司空调压缩机上下料生产线,1台机器人在工作节拍及操作空间上可同时满足2台机床上下料的需求。
5 结束语
本文出于对工业机器人组建的自动化生产手段等因素考虑,在基于关键技术和性能要求的基础上,设计的工业机器人用交流永磁同步伺服电动机。电机为三相交流永磁同步电动机,但是在不脱离技术构思的情况下,设计的实施方式不限于此,还可以结合不同的生产线要求做出其他多种形式的修改、替换或变更,为系列化设计及生产制造打下基础。
