二自由度自抗扰控制的整定方法
2021-09-08陈宗祥张武林陈克难
陈宗祥,张武林,陈克难,熊 宣
(安徽工业大学电气与信息工程学院,安徽马鞍山 243032)
在韩京清提出自抗扰控制(active disturbance rejection control,ADRC)的初期,ADRC 方法就与比例积分微分(proportional integral derivative,PID)控制存在着千丝万缕的联系。ADRC 的核心机制如跟踪微分器(tracking differentiator,TD)、扩张状态观测器(extended state observer,ESO)、状态误差反馈环节(state error feedback,SEF)等都是通过特殊的非线性函数构造的,难以对其进行理论分析。之后,Gao提出了线性自抗扰控制(linear active disturbance rejection control,LADRC),将自抗扰控制线性化,使得经典控制理论的分析方法得到应用,但并未给出控制器参数的定量设计方法。鉴于此,自抗扰参数的整定问题成为热点,学界、业界对其展开了大量研究。傅彩芬等通过先设计一个H
回路成型控制器获得ADRC 参数初始值,但对于不熟悉回路成型的工程控制人员不够便捷;马星河等通过人工蜂群算法实现ADRC 参数的自整定,取得了优良的控制效果,但其整定参数时难以给出各参数的搜索范围与搜索初值,盲目给出一个较大的搜索空间会极大延长参数整定所需时间;Jin 等将二阶LADRC 等效为二自由度PID,其环内控制器等效为PID 控制器串联二阶低通滤波器,通过设计PID控制器和滤波器获取ADRC的初始参数,但主要考虑二阶LADRC;韩文杰等通过推导LADRC 的积分作用与扰动、补偿之间的关系,得出LADRC 与PID 控制器能相互近似转化,且在低阶时具有良好的鲁棒性;邵立伟等将ADRC 应用在电机控制系统,结合时间尺度与自抗扰控制参数的关系,提出了一种新的参数整定方法,使参数整定更容易;Qing等、Zhang等利用改进的混沌量子粒子群优化算法对LADRC进行参数整定,克服了模型不确定的影响,获得了较强的鲁棒性与适应性。电力电子变换器是一类强非线性系统,存在输入电压与负载等系列的外部扰动,变换器的自身参数也往往由于生产工艺、系统温升等存在不确定性。ADRC 能够有效抑制系统的外扰、内扰并对其进行正确补偿,因此ADRC在电力电子变换器控制领域得到广泛应用。王孝洪等将ADRC应用到全桥变换器的电压外环上,减小了负载变化时输出电压的超调量,改善了系统的动态性能;杨惠等将ADRC 应用到光伏储能变换器的充放电内环中,使变换器能够有效抑制直流母线电压波动;Guerrero 等基于广义比例积分观测器ADRC 的思想,研究了均流分布的并联Buck 变换器驱动直流电机的控制器,该控制器能有效抵消级联变换器与电机引起的扰动,最终在实现均流的情况下,使电动机的角速度能跟踪期望值;Su 等将ADRC 应用到单相级联H桥整流器上,通过改进的连续性非线性函数抑制传统ADRC抖动问题,也能获得较好的动态性能与抗干扰能力;Khan等提出了五电平T型混合功率变换器的鲁棒控制策略,通过外部滑模控制与扩张状态观测器相结合的形式,动态计算出内部电流跟踪控制器的输入,改善了系统不确定时的动态性能及稳态性能,但主电路拓扑及控制电路较复杂。为综合改善LADRC 参数没有定量计算方法的问题,针对一阶LADRC 的等效二自由度系统,基于等效PI 控制器、滤波器的参数对应关系,提出一种LADRC 参数确定方法,且将所提方法应用到Buck变换器的串级控制上,通过仿真和实验验证方法的有效性。
1 一阶LADRC的等效二自由度系统及其参数等效方法
考虑以下一阶系统

d
为外部扰动;b
为控制量的增益;t
为时间;f
(y
,d
,t
)为系统内未知时变动态与外扰的综合特性;y
,u
分别为系统的输出和输入。多数情况,b
的精确值不易获取,可认为b
部分已知,已知部分为b
。此时系统变为
ω
=f
(y
,d
,t
) +(b
-b
)u
,为扩张状态,即为需要估计的总扰动。引入状态变量x
=y
,x
=ω
,则式(2)的状态空间表达式为
x
,x
,设计二阶线性扩张观测器(linear extended state observer,LESO),如
β
,β
为两个可调的观测器增益;z
̇,z
̇为x
̇,x
̇的估计;z
,z
为观测器的状态变量。将LESO观测所得总扰动实时补偿到控制量,可把控制律设置为
k
为控制器唯一可调参数;r
为系统输出的给定值。若观测器增益经良好整定,则z
→y
,z
→ω
。将式(5)代入式(2),可发现经过LADRC补偿的一阶系统被简化为一单积分器,通过比例控制就可达到良好的控制效果。
u
=k
(r
-y
)。考虑到观测器的估计能力,其输出跟踪输入有一个过渡过程。故还需考虑观测器的传递函数,将式(5)代入式(4),观测器的输入变成y
,r
,重写观测器方程
y,r
为输入,u
为输出的双输入单输出线性系统。为求得系统传递函数矩阵,写出式(1)的传递函数矩阵
r
和y
到u
的传递函数。
通过式(9)可将LADRC等效成一个如图1所示的二自由度控制器。其中:


图1 LADRC的等效二自由度控制框图Fig.1 Equivalent 2-DOF control block diagram of LADRC
实际上,环内控制器C
(s
)等效于一阶低通滤波器与PI控制器串联,即
可解得等效关系为:

k
',k
'为等效系数,需求解的控制器参数为β
,β
,k
。对式(12)进行数学变换,可得关于β
的一元三次方程
l
= -k
'b
;l
=k
'Tb
;l
= -(k
'b
)。通过式(13)解得β
,即可依次获得β
,k
的值。故只要设计PI控制器与低通滤波器即可获得等效的LADRC 参数。相较直接使用PI 控制器,LADRC 的给定经前置滤波器柔化,在给定量r
突变的情况下,不易出现控制器深度饱和现象。此外,LADRC 相当于反馈回路额外加入一个低通滤波器,更能有效地处理输出反馈中引入的高频干扰。2 Buck变换器的自抗扰PI串级控制器设计
2.1 Buck变换器的数学模型
图2 为典型Buck 变换器主电路拓扑。其中包含输入电压U
、输出电压U
、全控型开关管VT、电感L
、电容C
、续流二极管VD1 和负载电阻R
。为使开关管VT 工作在开关状态,在VT 控制端施加周期一定、占空比可调的驱动信号U
。其中:i,i
分别为电感和开关管的电流;i
为负载电流。
图2 Buck变换器拓扑Fig.2 Buck converter topology
通过状态空间平均法对Buck 变换器进行小信号建模,可得其输出电压环路与电感电流环路的传递函数:

d
(s
)为控制量。2.2 LADRC控制器设计方法
采用图3所示的控制器结构,电流内环为PI控制器,电压外环为一阶LADRC控制器。

图3 变换器控制结构Fig.3 Converter control structure

c
=K
RU
;c
=K
RU
;a
=LRC
;a
=L
+CK
RU
;a
=R
+K
U
+CK
RU
;a
=K
U
。求解电压环参数需确定如下参数:电压环的比例积分常数K
,K
;电压环低通滤波器时间常数T
;电压环控制量增益b
。K
,K
确定方法与电流环类似,不再赘述。LADRC中的等效一阶低通滤波器设计主要有如下约束:变换器的实际有效带宽不会超过1/2开关频率,为保证有效信号幅值不被衰减,相位无滞后,可将滤波器的截止频率设置成比1/2 开关频率略大。为确定电压环控制量增益b
,在自抗扰的范式下,将传递函数变为微分方程后对两端进行积分,式(16)中系统可视为如式(17)所示的一阶系统。
b
=c
/a
,在此基础上根据系统的响应速度对b
进一步调整。3 仿真分析
为验证本文所提LADRC 参数整定方法的有效性,以控制对象模型为基准选定b
的初值,在此基础上调整b
,求解多组LADRC 参数。将设计的LADRC 参数应用在Buck变换器上,利用MATLAB/Simulink平台对该控制系统进行仿真分析。其中Buck变换器的输入电压U
= 12 V,输出电压U
= 2.5 V、电感L
= 15 μH、电容C
= 200 μF、最小负载电阻R
= 0.25 Ω、最大负载电阻R
= 0.5 Ω、开关频率f
= 100 kHz。将变换器电流环、电压环的穿越频率分别设置为30,6 kHz,求得两个环路的比例积分常数分别为:

T
=2.268×10。将Buck 变换器参数代入式(17)可求得b
= 4 330,将其作为调节b
时的初值。一阶LADRC 与PI 控制器补偿后的系统波特图如图4。从图4可看到:系统的低频段与中频段,幅值增益曲线几乎重合,在穿越频率处以-20 dB 的斜率穿越0 dB 线,故PI 和一阶LADRC 有类似的动态响应性能;高频段,一阶LADRC 以-40 dB 的斜率衰减,一阶LADRC 的等效串联一阶低通滤波器带来了额外的幅值衰减,与前文的分析相符。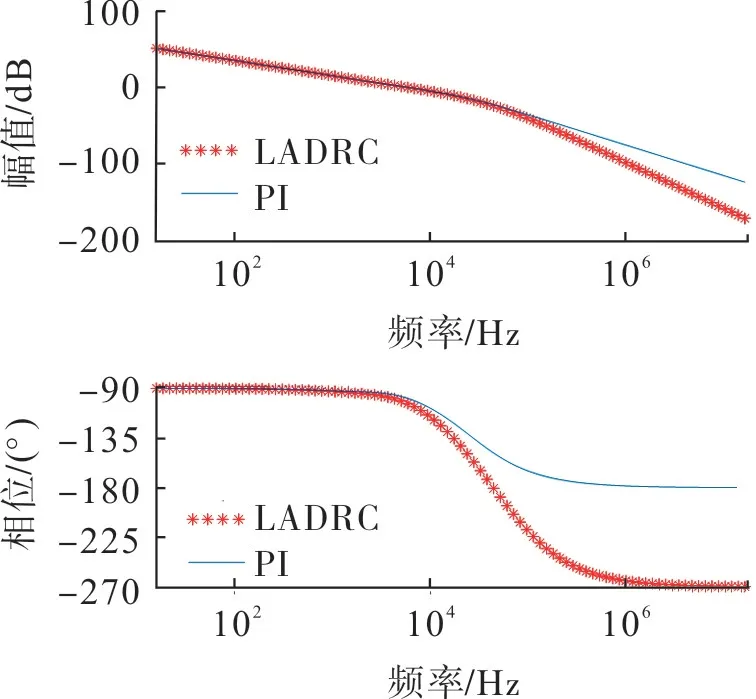
图4 LADRC与PI控制器补偿后的系统波特图Fig.4 Bode diagram of system compensated by LADRC and PI controller
一阶LADRC的时域响应波形如图5。由图5可看出:应用式整定的LADRC 参数,启动过程中出现较大振荡;逐渐增大b
,b
= 17 800 时,启动过程振荡程度减小,b
= 21200时,得到快速无超调的启动过程;值得注意的是,3 组LADRC 参数在频域上是等效的,其时域响应不同,这是由于变换器的输出电流不能无限增大,在电流环中加入了限幅环节;饱和非线性的存在使3组相同频域特性的参数时域响应不同,较小的b
意味着LADRC 输出时控制量经过较小的衰减,在启动过程中易使电流内环PI 控制量饱和。3组LADRC参数如表1。
表1 不同b0 下的LADRC参数Tab.1 LADRC parameters under different b0 conditions
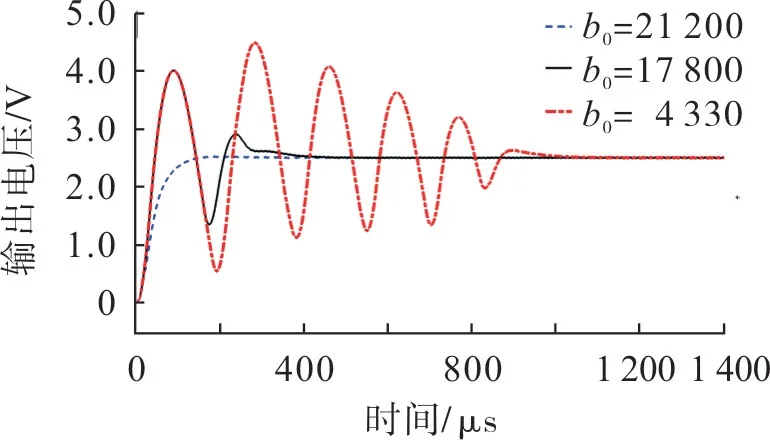
图5 不同条件下变换器的启动过程Fig.5 Starting process of converters under different conditions
图6 为负载跳变时变换器输出电压的波形。由图6 可看出:在2 000 μs 时变换器所带负载由5 A 向10 A 跳变,输出电压跌落340 mV,经过约110 μs 回到稳态(即11 个开关周期);在2 500 μs 时所带负载由10 A 向5 A 跳变,输出电压过冲380 mV,经过约100 μs 回到稳态(10 个开关周期)。由此表明,本文所提方法整定的LADRC 参数具备良好的抗扰性能。从时域上看,采用不同b
整定的一阶LADRC具有类似的暂态性能。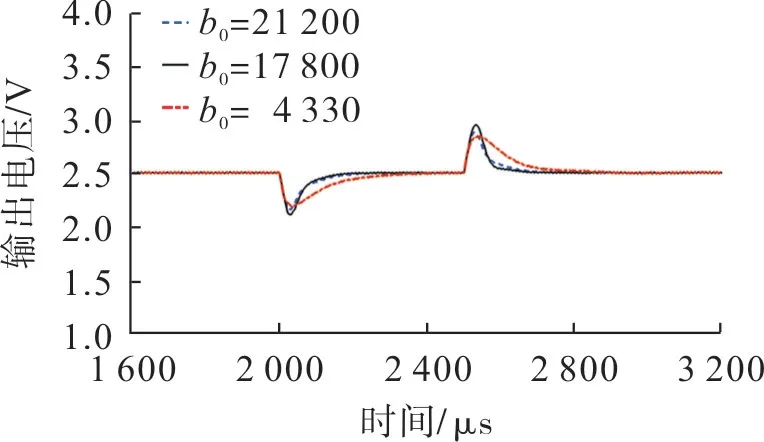
图6 不同条件下电压动态响应过程Fig.6 Voltage dynamic response process under different conditions
完成LADRC 的整定后,将等效PI 控制器与之进行比较,结果如图7,8。由图7可看出,LADRC 的启动性能优于PI 控制器。根据上节理论推导,一阶LADRC 可等效为二自由度PI 控制器,其给定经过前置滤波器柔化,可解释其在启动过程中的优势。由图8 可看出,两种控制器具有类似的暂态性能,超调量与恢复时间较为接近,验证了前文频域分析所得结果。
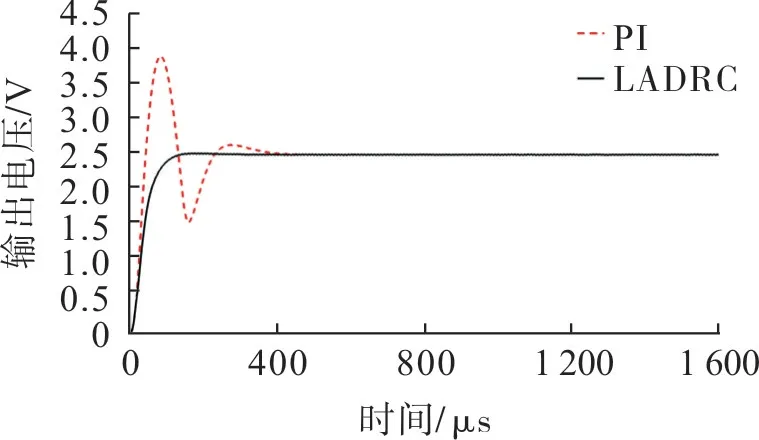
图7 LADRC与PI控制器的启动过程Fig.7 Starting process of LADRC and PI controller
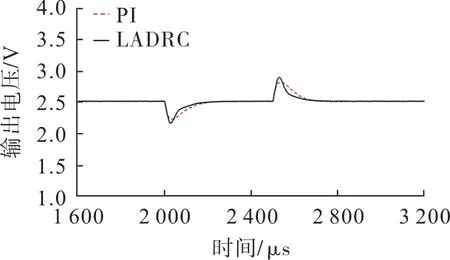
图8 LADRC与PI控制器电压暂态响应过程Fig.8 Voltage transient response process of LADRC and PI controller
4 实验分析
搭建实验样机对所提整定方法进行验证,Buck变换器样机参数与仿真参数保持一致。图9为基于DSP28377 的Buck 变换器实验平台,并对其各部分功能进行标注。
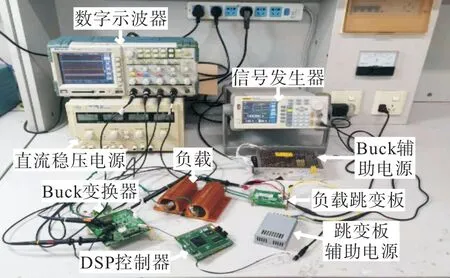
图9 基于DSP的Buck实验平台Fig.9 Buck experimental platform based on DSP
4.1 启动过程
LADRC 控制器与PI 控制器在启动过程输出电压波形如图10。图中从上到下依次是PWM 信号,输出电压U
。
图10 PI与LADRC控制下变换器启动过程Fig.10 Starting process of converter under the control of LADRC and PI
由图10 可看出:超调量方面,PI 控制下输出电压超调量为1.5 V,LADRC 控制下输出电压超调量为0.1 V,LADRC 在启动过程中超调较小;响应时间方面,PI 控制下输出电压在启动后500 μs 进入稳定状态,LADRC控制下启动时间缩短到260 μs,LADRC在启动过程中瞬态过程更短。
4.2 负载跳变过程
LADRC 与PI控制下的加载跳变过程如图11。由图11可看出,负载由5 A 跳变至10 A 的过程中,PI控制下变换器输出电压需200 μs 恢复稳态,LADRC 控制下只需100 μs。LADRC 与PI 控制下的减载跳变过程如图12。由图12 可看出,负载由10 A 跳变至5 A 的过程中,PI 控制下变换器输出电压需150 μs 恢复稳态,LADRC控制下仅需100 μs,故加减载过程中LADRC均表现出更强的快速性。
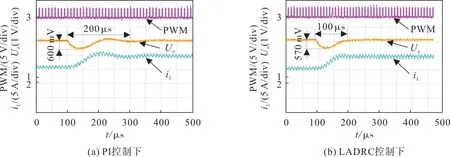
图11 PI与LADRC控制下5 A→10 A波形Fig.11 5 A →10 A waveform under the control of PI and LADRC

图12 PI与LADRC控制下10 A→5 A波形Fig.12 10 A→5 A waveform under the control of PI and LADRC
综上可看出,实验波形与仿真波形略有不同,实验中PI 控制下系统的暂态过程较LADRC 慢。究其原因:实验中使用的元器件存在诸多非理想因素,如器件容差、电感、电容都会与仿真环境存在差别;对电感电流和输出电压的采样易在控制系统中引入高频噪声,LADRC 控制器对高频噪声的抑制能力更强,在实际中应用中表现更佳。
5 结 论
将一阶LADRC 等效为二自由度控制器,得出其等效二自由度系统的环内控制器与PI 控制器存在等价关系,提出通过设计PI参数快速对LADRC控制器进行整定的方法,将所提整定方法应用到电力电子领域最常用的Buck 变换器上。仿真与实验结果表明:所提整定方法可有效将PI 参数转换为LADRC 参数,系统的启动性能与暂态性能均较PI 控制下更佳,启动过程调节时间减少240 μs,超调量减小56%;加载过程调节时间减少100 μs,超调量减小1.2%;减载过程调节时间减少50 μs。
