面向自治对象的火电机组风烟系统APS 功能设计与应用
2021-09-05张新胜王剑平丁伟聪
张新胜,胡 欣,王剑平,丁伟聪
(1.国网浙江省电力有限公司电力科学研究院,杭州 310014;2.杭州意能电力技术有限公司,杭州 310012;3.浙江浙能镇海发电有限责任公司,浙江 宁波 315208;4.浙江省能源集团有限公司,杭州 310007)
0 引言
送风机和引风机是火力发电机组的主、重要辅机,其组成的风烟系统[1-2]是保证锅炉安全燃烧运行的基本系统。风烟系统的主要功能是向炉膛提供与燃料相匹配的风量,保证煤粉充分燃烧,同时使得送风量与引风量相适应,保持炉膛负压在安全范围内。基于以上功能,风烟系统一般包括引风机本体及油站、送风机本体及油站、风烟挡板及二次风门等,随着机组装机容量的增加,在启停过程中涉及的电动机、阀门等一次设备越来越多,启停过程包含大量操作,大大加重了运行人员的操作负担。
作为火力发电机组智能化发展的重要方向,机组APS(自启停控制系统)经过多年的发展与实践,其设计理念及操作模式逐渐被发电行业认可,并逐步应用在大型电厂的控制系统中[3-7]。而由于风烟系统是一个功能相对独立的系统,对风烟系统APS 功能的设计也越来越多,以完成风烟系统的启停和全程控制[8-10]。但传统的风烟系统APS技术主要是面向过程的顺序程序设计模式,路线设计单一固定,变工况无法自治,一旦针对机组特点固化下来,可以起到减轻运行人员操作负担的作用,但由于在启停过程中容错与操作自由度方面考虑不多,启停次数较少、磨合不够充分,运行人员对顺控操作的接受度不高,导致实用率较低、认可度不高。
针对上述问题,提出了一种面向自治对象的风烟系统APS 功能设计方法,采用面向对象的设计模式,围绕风烟系统形成了若干个相对独立的自治对象系统,启动路径灵活多样,变工况自治规划,人机协作性强,启动过程中任何位置、任何时间都可中断,任何中断处都可继续操作。运行人员在风烟系统启动过程中从一次设备的操作中解脱出来,进而关注的是过程,提出的是需求,面对的是对象,操作的是系统。该功能在某660 MW 超超临界机组上进行实际应用,在风机两侧启动、单侧启动、自动并列运行以及RB(辅机故障减负荷)工况下,风机启动与并列运行等各种工况实现风烟全程控制,控制系统具备较强的自治性和健壮性,大大提高了风烟系统APS 功能组的使用率与机组自动化水平。
1 面向自治对象的风烟系统APS 结构设计
火力发电机组中面对操作复杂的风烟控制系统,为了减轻运行人员操作负担,最简单有效的方法是化整为零,采用面向对象的设计模式,针对风烟系统的特性,将计算机科学中“面向对象编程技术”引入风烟系统全程控制中[11-12]。面向对象的程序设计是一种包含各种独立而又相互调用对象的设计模式,摒弃传统的顺序编程思想,为风烟系统APS 功能组赋予拥有行为能力、拥有意识、拥有智能的对象,根据工况变化自治改变执行路径,过程中无需运行人员干预。面向自治对象的风烟系统APS 功能以分布式自治的对象系统为基础,串接全局任务规划与调用结构,结构框架如图1 所示。

图1 面向自治对象的风烟系统APS 功能原理结构
由图1 可知,面向自治对象的风烟系统APS功能原理结构包括任务规划系统、操作管理系统以及进度监视系统。任务规划系统作为风烟系统APS 功能的规划运行层,负责布局风烟系统全局控制流程与指标要求,运行操作员在启停授权的前提下,对功能组进行启动或停运指令的下发,另外还负责运行人员对过程层面的操作目的、目标值以及过程参数品质的设定。操作管理系统作为对象任务层,接收任务规划系统的操作指令,围绕风烟系统本体形成了引风机功能子组对象、送风机功能子组对象以及并退功能子组对象,3个功能子组对象相互独立又相互调用,调用路径灵活多样,通过预置模块自治规划调用顺序,预置模块收集任务规划系统指令确定3 个功能子组对象调用顺序与运行偏好,还可作为运行的干预节点。进度监视系统作为功能组的辅助层,对操作管理系统的进度进行管理,显示已启动、已达到控制状态以及已停运,并显示报警信息,为运行人员指明干预方向。
面向自治对象的风烟系统APS 功能在任务规划系统以及操作管理系统的作用下,可以完成风烟系统的启动、停运和并退任务。在启动过程中,操作管理系统可以根据任务规划系统的设定,自治规划不同的启动路径,其完整的调用结构如图2 所示。
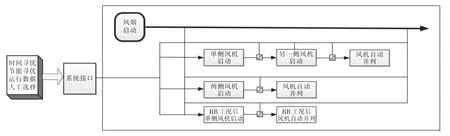
图2 面向自治对象的风烟系统启动功能调用结构
由图2 可知,面向自治对象的风烟系统APS功能在风烟系统启动过程中,规划了3 条路径:启机前期单侧风机启动,机组启动后期另一侧风机启动以及风机自动并列;机组启动前期,两侧风机启动以及风机并列;RB 工况后停运侧风机启动以及风机自动并列。3 条路径组成风烟系统启动自治对象,根据时间寻优、节能寻优、运行数据或人工选择自主完成路径选择,在启动过程取消了风烟系统主、辅设备的单操功能,运行人员只需对风量参数、炉膛负压指标与目标进行设定,过程节点预置完成后,设备层的相关操作由对象系统内的程序控制自动完成。
2 面向自治对象的风烟系统全程控制策略设计
面向自治对象的风烟系统全程控制基本功能主要包括:引风机启动、送风机启动、引风机自动调平以及送风机自动调平。送、引风机启动可以自治区分启机过程启动与另一侧已带负荷启动,启机过程启动可以根据运行人员选择进行两侧风机和单侧风机启动,另一侧已带负荷启动可以自动判断,启动后自动进行两侧风机出力调平。
2.1 风烟系统启动功能组
风烟系统启动功能组是风烟系统的最高控制层,对风烟系统的整个运行工况进行监视,根据运行人员选择,自治地向风烟系统各子系统发出控制指令,在人工少量干预的情况下完成对风烟系统的全程自动控制,设计框图如图3 所示。
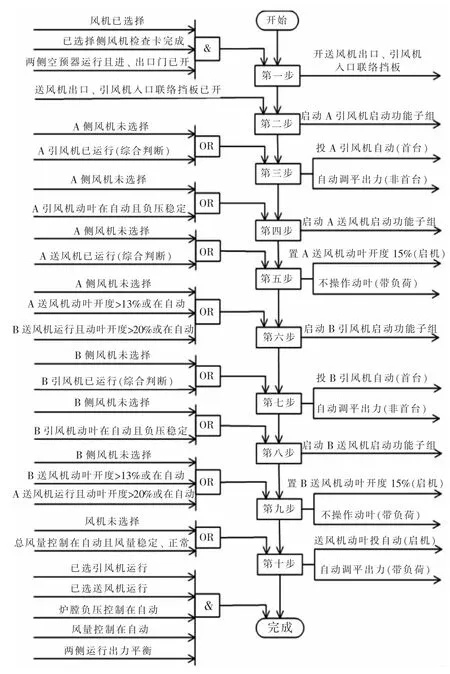
图3 风烟系统启动功能组逻辑框图
如图3 所示,风烟系统启动功能组可以灵活对送、引风机进行操作,操作员只需根据需求进行选择,输入目标后,点击开始,启动功能组可以自行判断出风烟系统启动是在启机过程中还是带负荷辅机跳闸后的,然后执行对送、引风机的启动以及动叶的操作。具体如下:
第三步执行时,先判断是否首台启动,首台启动直接对A 引风机动叶投自动,炉膛负压设定值-150 Pa;否则,调用引风机自动调平功能,调平两侧出力后,投入A 引风机动叶自动,包括高负荷下引风机RB 工况以及低负荷下引风机跳闸后启动工况。
第五步执行时,先根据B 送风机运行情况、动叶开度以及A 送风机动叶开度综合判断是否为启机过程:若是,即直接对A 送风机动叶开度按一定速率置15%;否则,认为是带负荷工况,避免操作A 送风机动叶,防止对风量以及炉膛负压造成扰动,后期直接调用送风机自动调平功能。
第十步执行时,根据前期判断出的启机过程或带负荷工况对总风量控制进行操作,若是启机过程(两侧或单侧),即在送风机动叶开度15%基础上,投入送风机动叶自动,对总风量进行自动控制,设定值缓慢加至吹扫风量650 t/h;若为带负荷工况,则调用送风机自动调平功能,投入动叶自动,风量设定值维持不变。
2.2 风机自动调平功能
风烟系统启动功能组中设置了送、引风机自动调平功能,当一侧风机已运行且有一定出力时,另一侧风机启动后,在兼顾炉膛负压、总风量以及机组运行状态时,自动安全可靠地调平两侧风机出力,过程中操作员可随时根据机组状况进行干预。主要针对如下工况:启机过程中单侧风机启动后,另一侧风机启动时;送、引风机RB后,重新启动跳闸侧风机时;深度调峰期间,辅机跳闸(送、引风机)后,重新启动跳闸侧风机时。以引风机并列为例,阐述风机并列原理[13-15],控制逻辑框图如图4 所示。
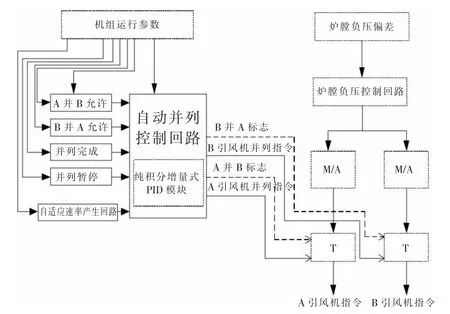
图4 引风机并列控制逻辑框图
由图4 可知,引风机自动调平功能中,操作员可以通过风烟系统启动功能组进行调用。另外,为了灵活管理,还设置了引风机自动调平按钮,操作员打开按钮后,投入并引风机功能,自动并列控制回路会根据机组运行数据自动判断是A 引风机并B 引风机还是B 引风机并A 引风机,然后对其动叶进行操作。在调平两侧引风机出力时,操作员可根据风机出力情况以及机组状态随时干预,通过退出并引风机功能按钮,退出并风机过程,自行对其动叶进行操作,恢复正常后,重新投入并引风机功能按钮,在当前状态继续执行并风机过程。
根据纯积分增量式PID 模块组成的自动并列控制回路作出判断:若是A 引风机并B 引风机,则生成A 并B 标志以及A 引风机并列指令,对A引风机动叶指令进行无扰切换;若是B 引风机并A 引风机,则生成B 并A 标志以及B 引风机并列指令,对B 引风机动叶指令进行无扰切换。其中,PID 积分时间设置60 s,PID 的输入偏差由自适应速率产生回路自动生成,原理如下:以两侧引风机电流偏差为依据,将并引风机过程划分为3 个阶段:电流偏差大于(包括等于)20 A 为第一阶段;电流偏差在10~20 A(包括等于10 A)为第二阶段;电流偏差小于10 A 为第三阶段。以每分钟30%的基准速率进行动叶操作,根据持续时间ti1(i=1,2,3)控制每次对动叶的操作量,根据间断时间ti2(i=1,2,3)控制每次操作动叶的间断时间,并根据炉膛负压的波动情况自适应改变间断时间,自适应速率产生回路设计思路见图5。

图5 自适应速率产生回路设计思路
如图5 所示,第一阶段时,t11为10 s,t12为20 s,即每次对动叶操作5%,间断20 s,直至电流偏差小于20 A;第二阶段时,t21为5 s,t22为30 s,即每次对动叶操作2.5%,间断30 s,直至电流偏差小于10 A;第三阶段时,t31为1 s,t32为40 s,即每次对动叶操作0.5%,间断40 s,直至电流偏差小于2 A。当两侧引风机电流偏差小于2 A 时,投入A 引风机动叶自动,并风机过程完成。
3 风烟系统APS 功能组投运效果
在某660 MW 超超临界机组上进行了面向自治对象的风烟系统APS 功能的实际投运,分别应用在单侧风机启动、两侧风机启动以及RB 工况后停运侧风机启动与自动并列上,应用效果良好,炉膛负压和风量的调节品质均达到很好的效果。整个启动过程中,运行人员无需对风烟系统挡板、风机油站、风机动叶以及电机等一次设备进行单独操作,大大减轻了运行人员的操作负担,真正意义上从繁琐的设备操作中解脱出来,只需面对对象,对系统进行操作,关注风机运行状态、炉膛负压和风量的调节品质,提高了操作灵活性与工况适应性,在面向自治对象的风烟系统APS 功能的作用下,相关参数运行曲线如图6—8 所示。
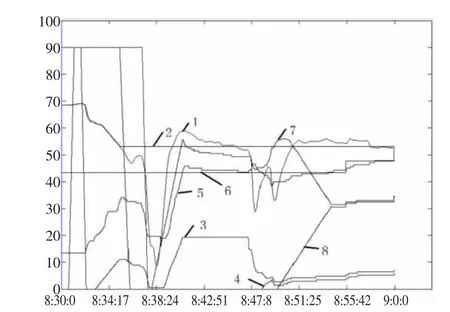
图6 单侧风机启动投运效果
图6 为风机单侧启动的投用效果曲线。由图6 可知,采用面向自治对象的风烟系统APS 功能在进行单侧风机启动时,耗时少于10 min,A 引风机动叶自动控制炉膛负压-150 Pa,A 送风机动叶自动控制总风量800 t/h,在启机后期B 侧风机启动,自动完成B 引风机和B 送风机并列,整个并列过程负压波动小于±100 Pa,总风量波动小于±50 t/h。
图7 为风机两侧启动的投用效果曲线。由图7 可知,采用面向自治对象的风烟系统APS 功能在进行两侧风机启动时,耗时少于12 min,A,B引风机动叶自动控制炉膛负压-150 Pa,A 送风机启动后动叶开度置15%,B 送风机启动后动叶开度同样置15%,然后自动同时操作动叶开度至风量800 t/h,A,B 送风机动叶投自动控制总风量800 t/h。

图7 两侧风机启动投运效果
图8 为RB 工况后风机自动并列的投用效果曲线。由图8 可知,采用面向自治对象的风烟系统APS 功能在进行RB 工况后风机自动并列时,引风机并列耗时少于5 min,送风机并列耗时少于5 min,风机RB 工况后,根据运行数据自动规划启动路径,完成停运侧风机启动,自动完成引风机和送风机并列,整个并列过程负压波动小于±150 Pa,总风量波动小于±50 t/h。
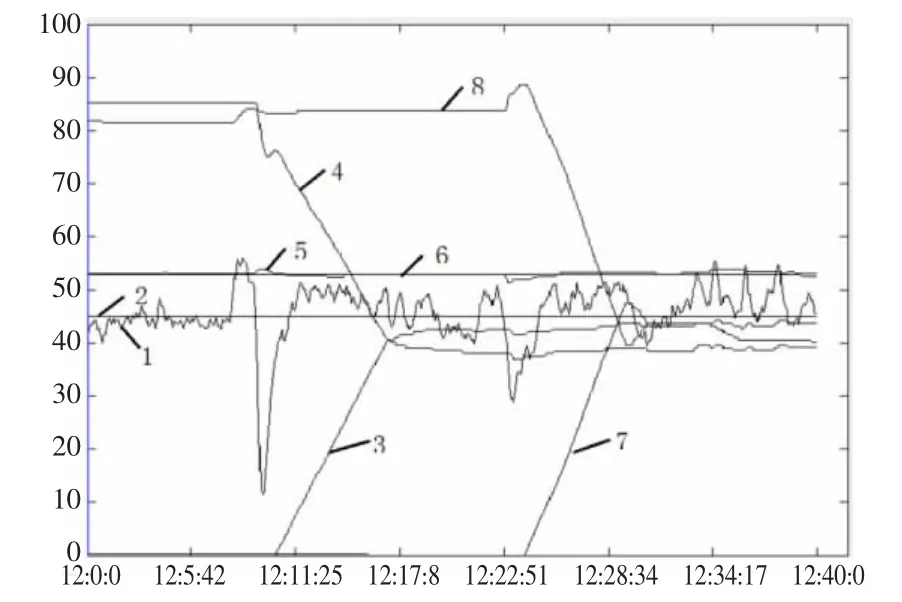
图8 RB 工况风机自动并列投运效果
4 结语
依据火电机组风烟系统控制的特点,摒弃传统相对单一固化的面向过程的设计模式,将面向对象编程技术引入风烟全程控制中,提出了一种面向自治对象的风烟系统APS 功能,启动路径灵活多样,在复杂多变的工况下自治规划路径。控制系统具备较强的自治性和健壮性,大大提高了风烟系统APS 功能组的使用率与机组自动化水平。
面向自治对象的风烟系统APS 功能在无需运行人员干预的情况下,实现了在风机两侧启动、单侧启动、自动并列运行以及RB 工况下风机启动与并列运行等各种工况的风烟全程控制,取消了风烟系统主、辅设备的单操功能,将运行人员从挡板、电动机等一次设备的操作中解脱出来,更关注系统层面的参数、指标与目标的设定,在整个启动过程中,炉膛负压、总风量始终控制在目标值附近,提高了风烟系统启动的安全性能,大大减轻了运行人员的操作强度。
