柔性直流接入电网后的高频谐振及其抑制策略
2021-09-05周竞宇刘汉军
周竞宇,赵 玲,张 军,刘汉军
(1.中国南方电网超高压输电公司,广州 510620;2.特变电工新疆新能源股份有限公司,西安 710000)
0 引言
基于MMC(模块化多电平换流器)的VSCHVDC(柔性高压直流,以下简称“柔直”)输电技术具有无换相失败风险、可实现有功和无功功率独立控制、运行范围宽、调节范围广等优点,已成为构建智能电网的关键技术之一[1-3]。目前,鲁西、渝鄂以及在建的乌东德工程都采用了MMC拓扑[4]。随着柔直工程单个换流站电压和容量的提升,换流站已经从配网转变为主网接入,其安全可靠运行对交流大电网的影响逐渐增大[5]。
对于基于MMC 的柔直换流站的稳定性分析,以往的研究大多集中在系统低频段[6-9],高频段特性的报道较少。然而,不同程度的高频振荡现象已随着柔直工程项目的不断深入而出现。例如舟山工程从联网转孤岛时发生高频振荡,厦门工程直流侧发生550 Hz 高频振荡,鲁西工程交流侧发生1271 Hz 高频振荡,渝鄂联网工程发生700 Hz 和1.8 kHz 附近的高频振荡[10-14]。文献[15]建立了MMC 高频阻抗模型,分析得出电压前馈延时是导致高频振荡的主要因素之一。文献[16]建立了MMC 在dq 坐标下的阻抗模型,详细分析了各环节对柔直高频阻抗特性的影响,提出高频振荡阻尼控制策略。
本文在以上研究的基础上,推导了柔直系统高频阻抗数学模型和柔直系统接入电网发生高频谐振的机理。并在此基础上,从柔直换流站控制角度出发,提出一种基于准PR(比例谐振)控制的柔直输电系统高频谐振抑制策略,给出了准PR 控制参数设计。最后通过PSCAD/EMTDC 仿真验证了所提控制策略的可行性。
1 柔直系统高频阻抗模型
以半桥型MMC 为例,推导柔直系统的高频阻抗模型。如图1 所示,换流阀由三相6 个桥臂构成,每个桥臂由N 个半桥模块、桥臂电感Larm和等效电阻Rarm组成。其中,usa,usb,usc为系统电压;uva,uvb,uvc为MMC 交流出口处输出电压;iva,ivb,ivc为MMC 交流出口处输出电流;Lt和Rt分别为联接变压器的等效漏感和电阻,ipa,ipb,ipc分别为三相上桥臂电流;ina,inb,inc分别为三相下桥臂电 流;upa,upb,upc分别为三相上桥臂电压;una,unb,unc分别为三相下桥臂电压;Udc为直流电压。
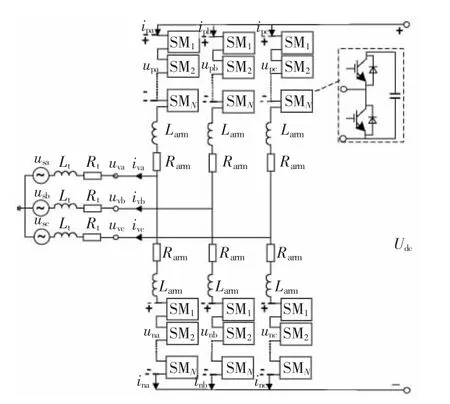
图1 MMC 拓扑结构
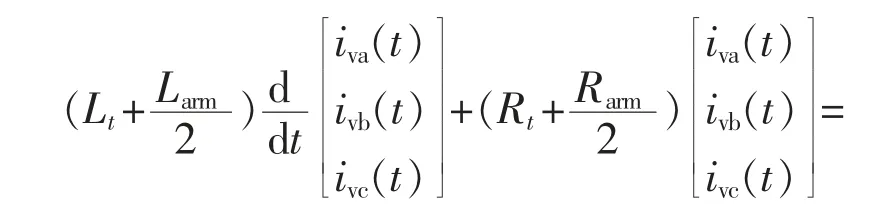
根据基尔霍夫电压定律可得abc 三相坐标下MMC 的基频动态方程为:
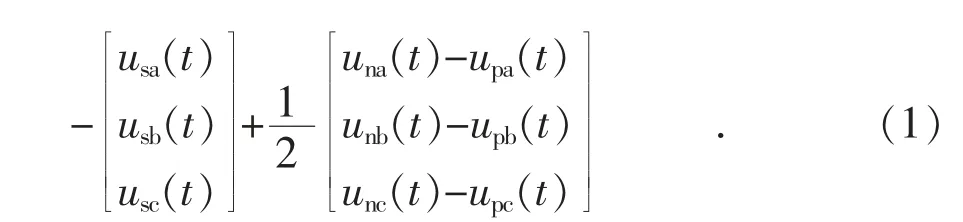
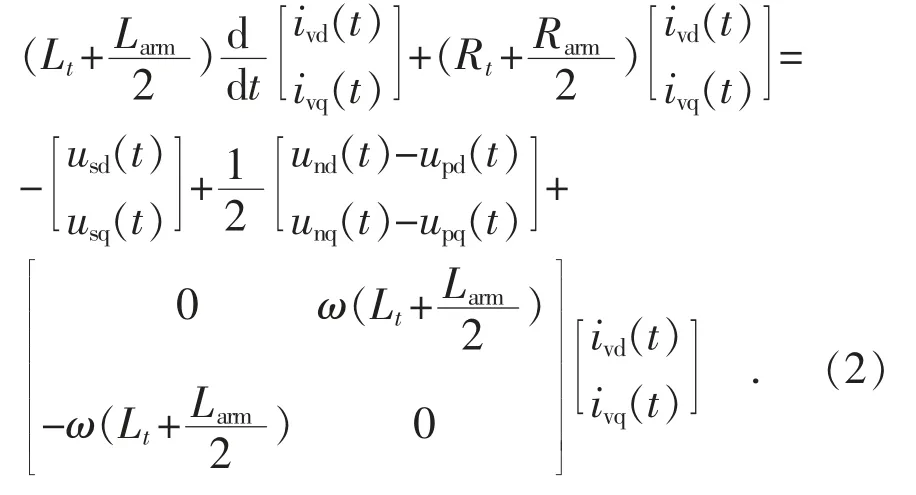
经dq 变换后的数学模型为:
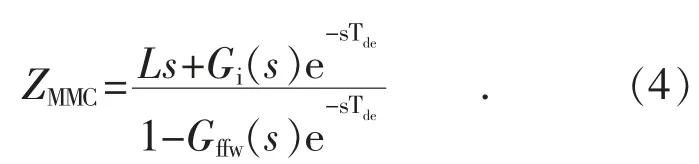
对式(2)进行拉普拉斯变换可得MMC 在dq坐标下的频域模型为:
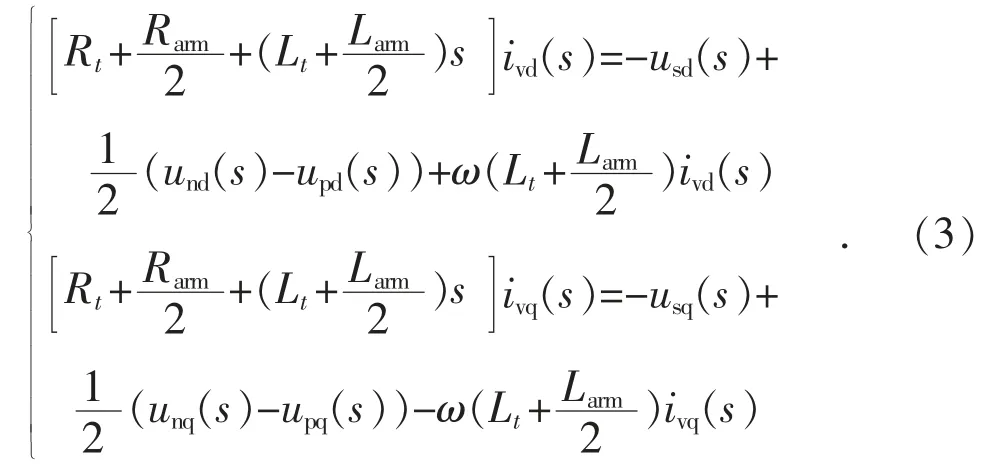
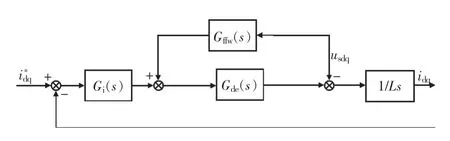
图2 柔直系统控制框图
2 交流系统模型
当系统运行工况发生变化时,交流系统网络阻抗由阻感性变为容性,可由图3 进行等效。
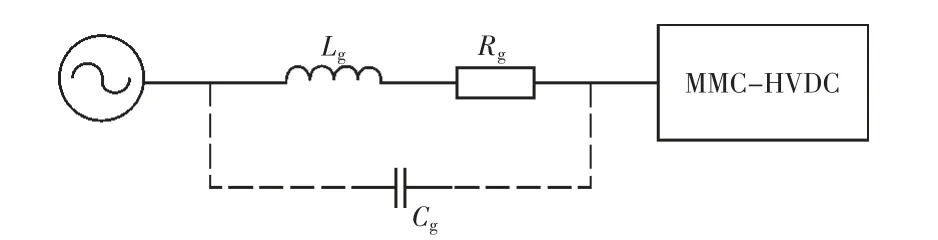
图3 交流系统等效模型
3 柔直系统高频谐振现象
主电路参数和控制系统参数见表1。
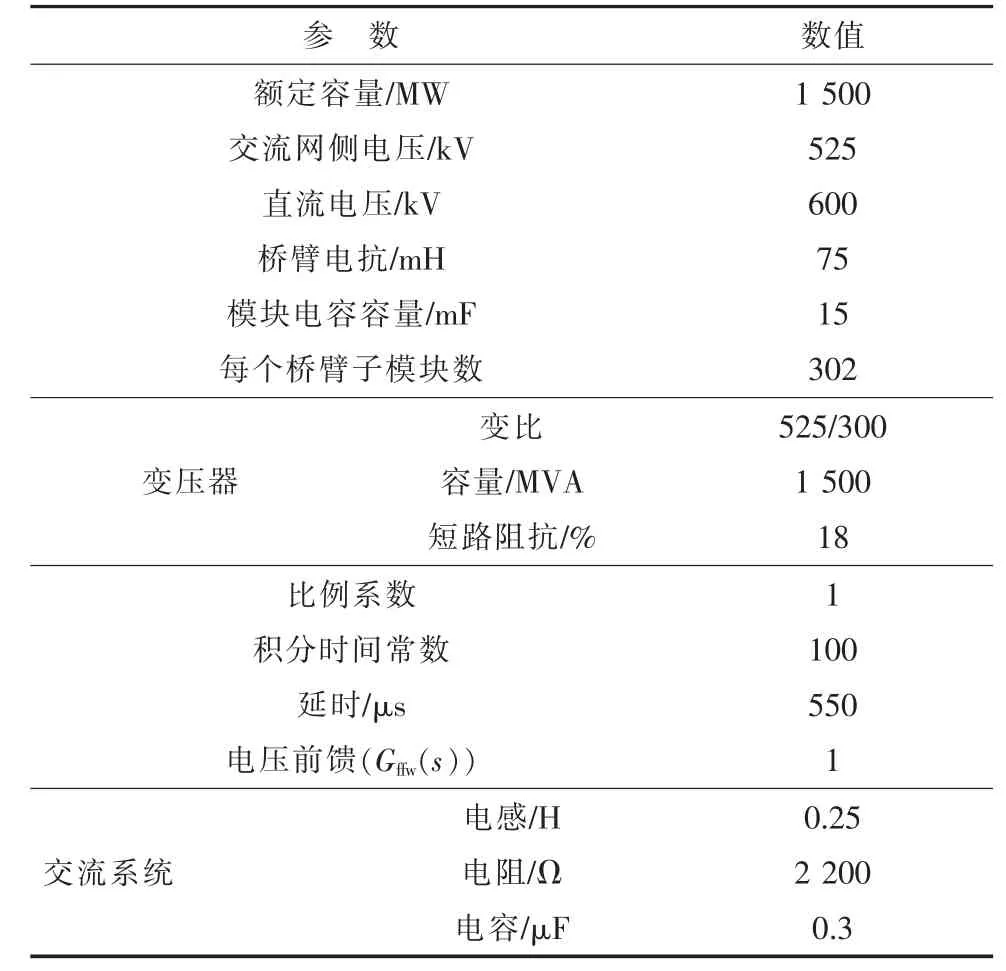
表1 柔直系统参数
当交流系统阻抗加入电容呈阻容性时,柔直系统高频阻抗与交流系统阻抗曲线相交,如图4(a)所示,交点频率为1 000 Hz 左右,相位差为194.5°。根据奈奎斯特稳定判据可知,系统发生振荡;当交流系统不加电容支路,阻抗呈阻感性时,如图4(b)所示,柔直系统高频阻抗与交流系统阻抗曲线交点相位差为88.6°,因此系统不会发生振荡。
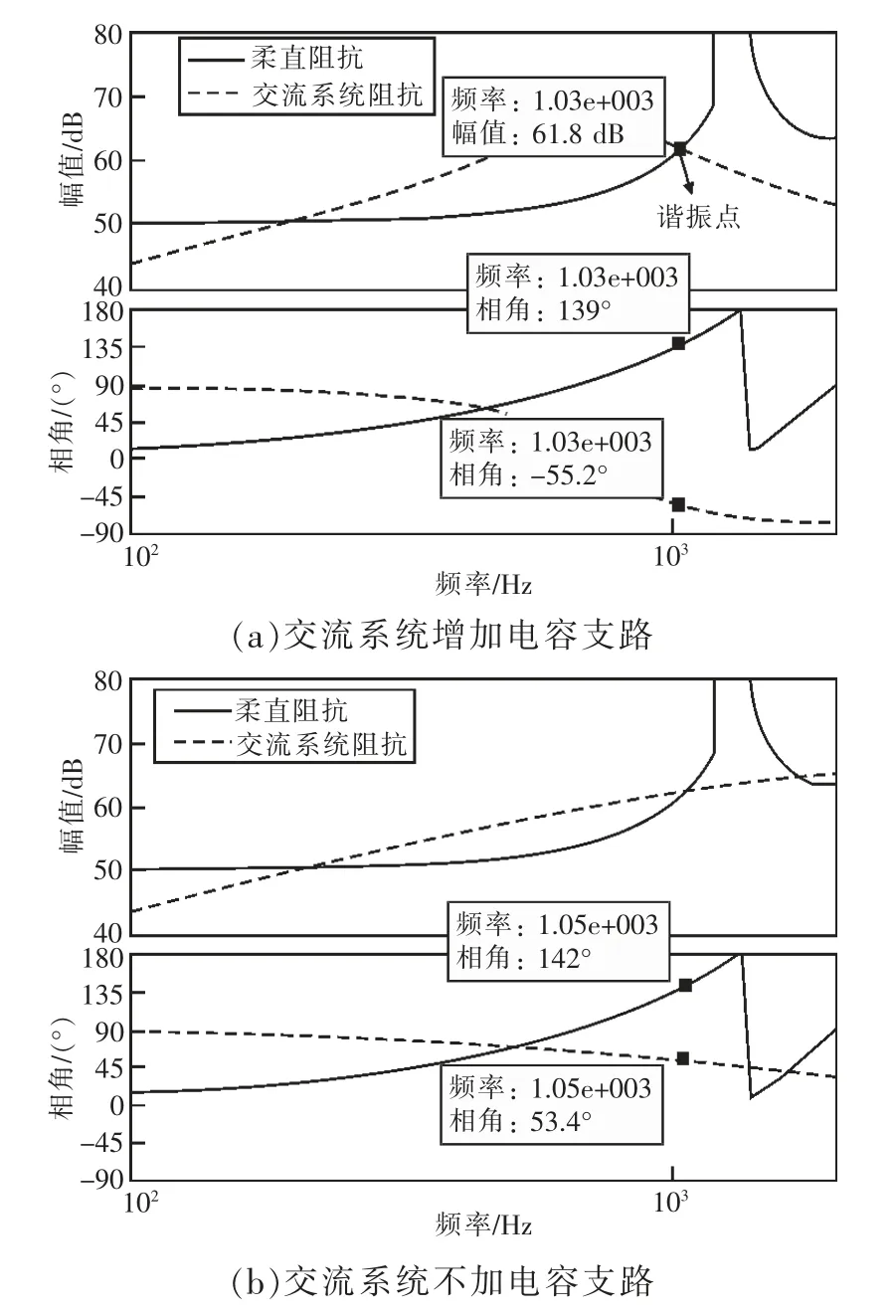
图4 系统阻抗bode 图
为了验证上述理论分析的正确性,在PSCAD/EMTDC 中搭建柔直系统仿真模型,仿真波形如图5 所示。
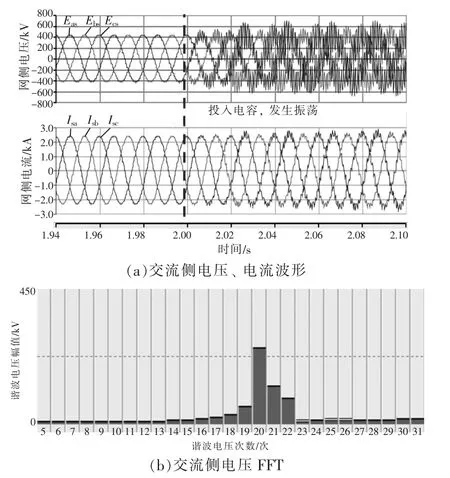
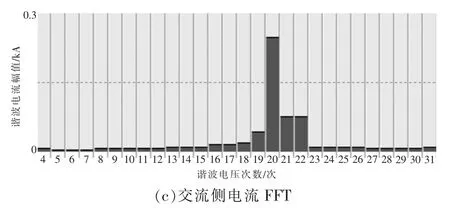
图5 交流系统电压电流波形
由图5(a)可见,2 s 时交流系统阻抗发生变化,增加电容支路,系统发生振荡。系统电压、电流振荡频次为20 次,频率为1 000 Hz 左右,如图5(b)、图5(c)所示,与图4 的理论分析一致。
4 基于准PR 控制的高频谐振抑制策略
本文从柔直换流站控制的角度出发,通过在电流内环PI 控制中并联准PR 控制后得到最终的调制波信号,以达到抑制系统高频谐振的目的。
图6 所示为基于准PR 控制的高频谐振抑制策略,即在电流内环PI 控制器中并联准谐振控制器R,得到柔直换流站控制系统电流内环调节量,通过限幅、电压前馈、坐标变换最终形成调制波,完成柔直输电系统接入电网引起的高频振荡抑制。准谐振控制器R 的传递函数为:
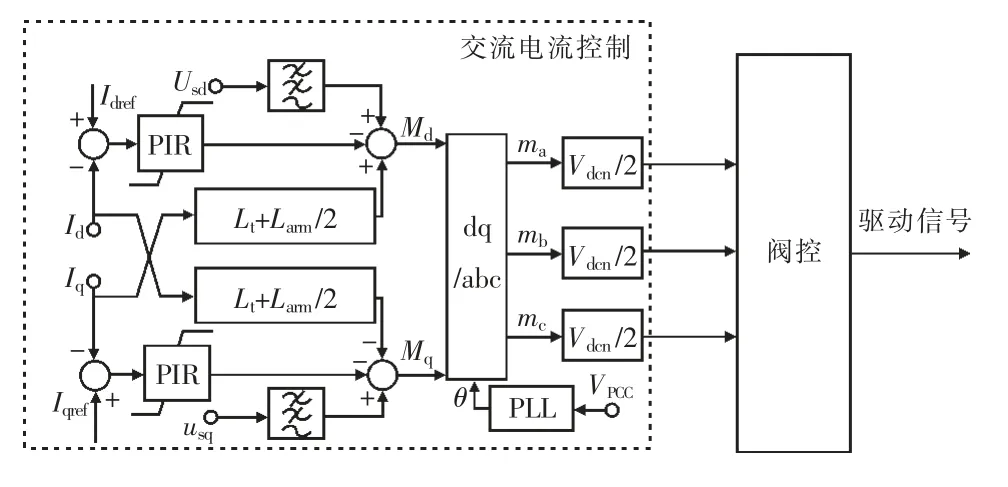
图6 基于准PR 控制的高频谐振抑制框图

式中:ωn为谐振频率;ωc为谐振控制器带宽;kr为谐振控制器增益。
为了提高系统的动态性能和稳定性,必须保证控制器有足够的带宽,对于ωc和kr的设计方法如下:
如图7 所示,调节ωc主要改变谐振点频带,ωc越大,带宽越大,ωc对谐振频率处的增益没有影响。在调试过程中,主要根据电网频率波动大小来调节,若电网频率波动较大,可加大ωc,反之减小。
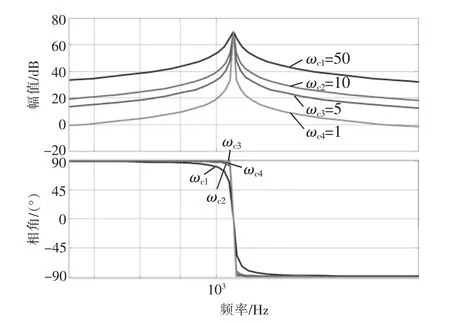
图7 ωc 对控制器的影响
由图8 可见,Kr只影响控制器的增益,并不影响控制器的带宽,控制器的增益和Kr成正比。在调试过程中,若某次谐波含量较大,可加大Kr,反之减小。
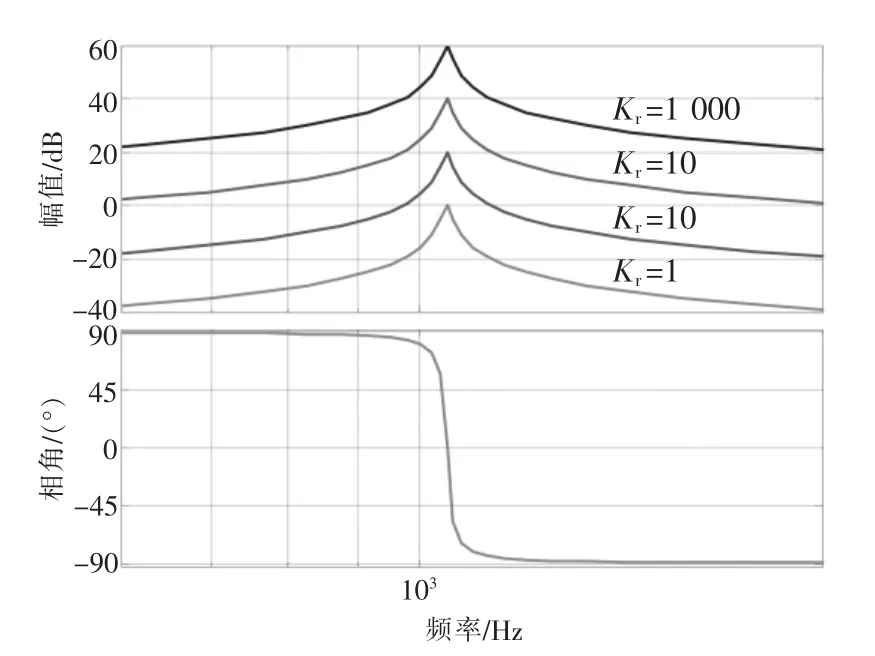
图8 Kr 对控制器的影响
柔直系统与交流系统之间的谐振是由阻抗特性引起的,阻抗的改变会影响系统谐振频率,增加准PR 控制器的目的在于滤除可能引起谐振的频率,实现系统的稳定、可靠运行。
5 仿真验证
将上节所提控制策略加入PSCAD/EMTDC 中搭建的柔直系统仿真模型,验证基于陷波控制的柔直系统高频谐振抑制策略的正确性。
由图9 可知,柔直系统与交流系统可能发生高频谐振的频段为(962~1 350 Hz),综合考虑工频衰减和系统动态特性,选取截止频率ρ=750 Hz。仿真波形如图10 所示。
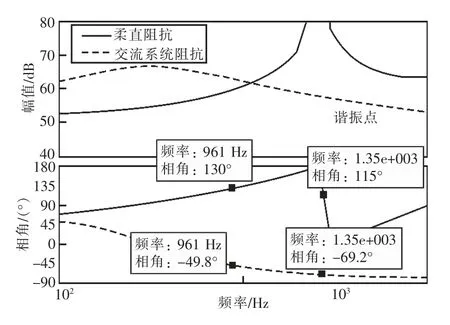
图9 系统阻抗bode 图
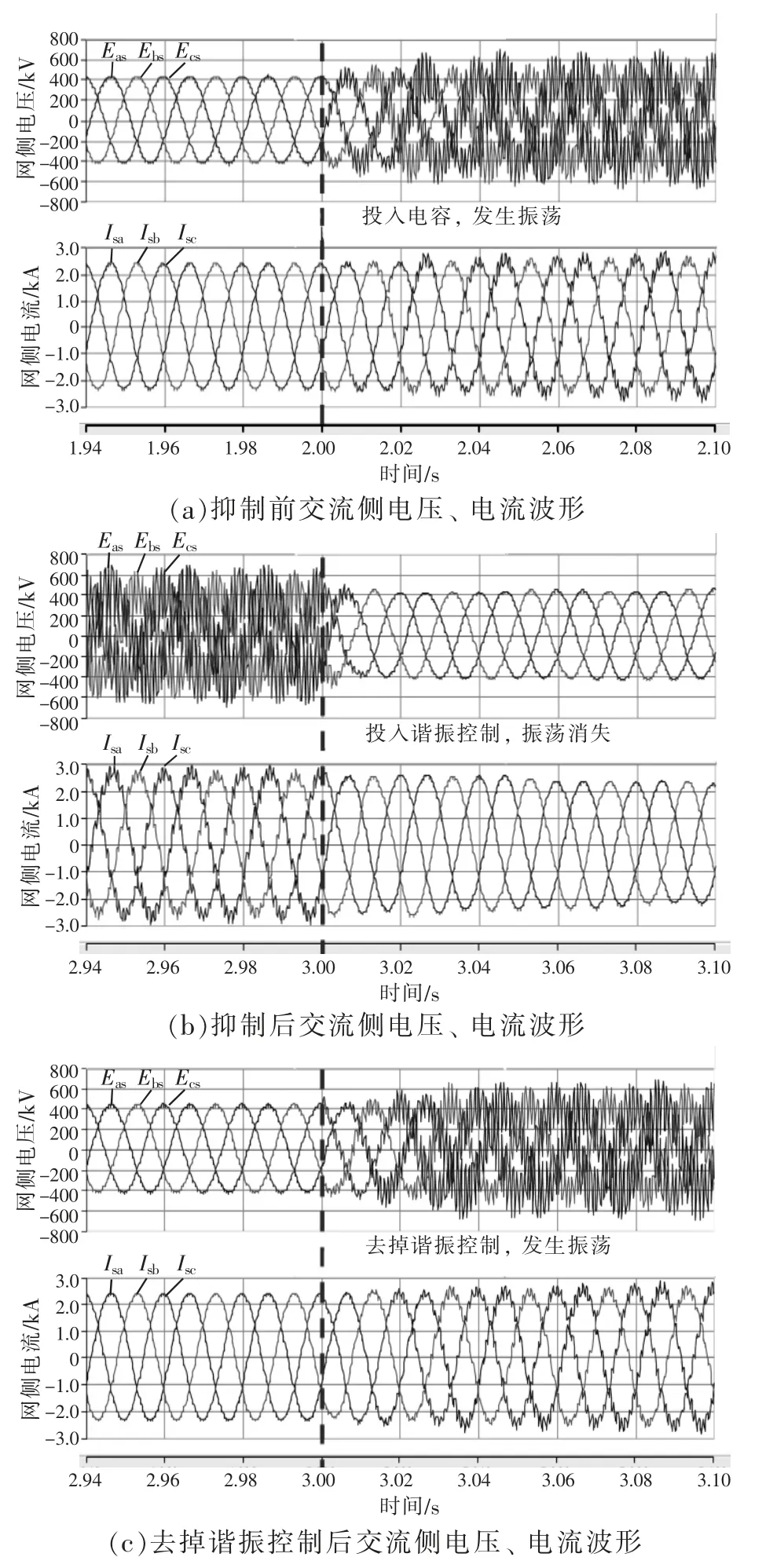
图10 网侧电压、电流波形
如图10(a)所示,2 s 时投入电容支路,交流系统阻抗发生变化,系统发生谐振;3 s 时在电流内环增加准谐振控制环节,经过5 ms 左右,高频谐振消失,仿真波形如图10(b)所示;5 s 时去掉谐振控制,系统再次发生振荡,如图10(c)所示。可见,该控制策略对高频谐振具有较好的抑制效果。
6 结论
本文针对柔直输电系统高频谐振的问题,推导了柔直输电系统高频段阻抗模型,分析了高频振荡产生机理,提出基于准谐振控制的柔直输电系统高频谐振抑制策略,经过理论分析和仿真验证,得出以下结论:
(1)所提出的准谐振控制器R 参数设计方法是可行的,根据所提方法得到的参数可有效抑制高频谐振。
(2)基于准谐振控制的柔直系统高频谐振抑制策略,可有效抑制高频谐振问题,提高系统的稳定性、可靠性。
