基于捷联惯导系统的车载导弹动态快速对准技术
2021-09-04应智慧吴学科姜永旺王宏刚高春峰
应智慧,吴学科,姜永旺,王宏刚,高春峰
(1.96723部队,柳州 545616;2.国防科技大学前沿交叉学科学院,长沙 410073)
0 引言
在导弹武器系统的发射准备过程中,弹载惯导系统的初始对准占据了发射准备的大部分时间。惯导系统的初始对准是指在系统进入导航工作前必须确定惯导系统惯性测量单元(Inertial Measurement Unit,IMU)载体系和地理系的初始姿态矩阵[1-2]。惯导系统初始对准要求用尽可能少的耗时精确地给出载体系到导航系的初始姿态矩阵,为随后的姿态更新提供初始条件。因此,通过缩短惯导初始对准时间以快速完成导弹的发射准备对提高导弹武器系统的生存概率具有重要的意义[3-6]。
动态快速对准是缩短惯导系统初始对准时间的有效方法,相关技术可以实现发射车在高速移动状态下弹体IMU的初始对准,此项技术已经被美国、俄罗斯成熟用于多型导弹中。目前,国内动态传递对准的应用主要集中于机载武器装备中,在车载导航的快速对准方面尚未有具体应用[7-11]。本文基于捷联惯导系统的陆基导弹行进间快速对准技术为研究对象,从动基座传递对准方法入手,建立了系统的误差模型,对多种动态情况下的子系统对准性能进行分析和评估,给出了最优对准方案。
1 车载陆基导弹的动态快速对准方案论证
陆基导弹发射车车载主惯导安装在车架中,采用相对精度较高的捷联惯导系统,同时与卫星、里程计等外界测量设备进行组合导航,具有相对较高的导航精度,并且具备在静态状态下的快速自对准和动态情况下的滤波对准能力。
与主惯导相比,弹体上安装的捷联惯导系统采用中低精度惯导,其自对准精度受到惯导系统自身精度的限制。因此,动基座传递对准是实现陆基导弹的动态高精度对准的理想方案。传递对准的基本流程依次为粗对准、精对准和姿态修正。在粗对准阶段,主惯导将导航结果通过安装关系直接传递给子惯导。精对准阶段通过主子惯导分别解算出的导航信息建立状态方程和测量方程,通过对传递对准误差模型的分析给出滤波器的误差传递矩阵,即可利用最优估计滤波器对子惯导的一些误差参数(如失准角)进行估计。最后,通过得到的误差参数对子系统的输出姿态进行误差补偿即姿态修正,完成对准过程。传递对准的基本工作流程如图1所示。
其中,动态传递对准需要解决的主要问题包括以下几点:
1)传递对准的误差建模;
2)传递对准的匹配方式;
3)系统的可观性;
4)相关误差补偿。

图1 动态传递对准基本工作流程Fig.1 Basic workflow of dynamic transfer alignment
下面章节将针对车载导弹的特点对其动态快速传递对准需要解决的主要问题进行研究,针对陆基导弹发射车传递对准的实际应用环境,建立最优相关误差模型,确定传递对准匹配方式,选择最优滤波方法,对载车多种动态情况下弹体姿态对准的精度进行探究。
2 车载陆基导弹的动态传递对准算法设计
匹配方式是指滤波器量测方程中相关参数的选取方式,按观测信息的类型可分为计算参数匹配和测量参数匹配。计算参数匹配法就是将主子惯导输出的测量信息进行解算,将得到的速度、位置、姿态代入量测方程中进行匹配;而测量参数匹配法则是将主子系统的输出信息直接匹配。
计算参数匹配法存在对惯导直接输出的测量信息进行积分的一个过程,因此该方法在对准速度上略慢于测量参数匹配法。但由于积分过程有一定的平滑作用,因此可以对挠曲变形、载体振动等噪声干扰起到一定的抑制,从而提高对准精度。测量参数匹配法对外界扰动较为敏感,因此当载体机动能力有限时这种匹配方式比较有利于快速传递对准。可见,这两种类型的匹配方法各有优劣,实际应用时应当视具体情况选择合适的匹配方法。匹配量的选取主要有速度匹配、角速度匹配、位置匹配、姿态角匹配等方式。
针对武器系统的主子惯导安装情况和对准需估计的相关量进行分析,本文使用基于地理系的惯导系统误差模型,认为陀螺和加速度计的噪声为白噪声,系统的状态方程如下

系统的观测方程为

状态方程变量为

状态方程包括:1)子系统的三个姿态误差φ=[φEφNφU]、 东向和北向速度误差δV=[δVEδVNδVU]; 2)导航系中等效三个陀螺漂移
由惯导系统及传递对准的误差模型,可以得到系统的状态转移矩阵F

式(4)中,



噪声驱动矩阵为
噪声向量为

在采用“姿态+速度”匹配的方式下,采用载车的主惯导与弹体子惯导的姿态误差和速度误差为滤波器的观测值,考虑到两系统的安装误差、挠曲形变误差和杆臂误差,可以得到观测方程为


通过设置合理的滤波参数,即可实现对子惯导的姿态及其他相关导航结果和参数的误差估计。
3 车载陆基导弹的动态传递对准仿真分析
陆基导弹发射车在行进中存在多种动态情况,车体行进状态包括直行、转弯、上下坡,车体受到路面颠簸还会有振动。不同的运动状态会对滤波器产生不同的激励,会间接导致所设计的传递对准滤波器的对准精度和对准时长的不同。在前文对误差模型和对准方法以及滤波器相关分析的基础上,本节针对载车的不同运动状态对传递对准精度的影响进行仿真分析。结合目前国内捷联惯导系统平均对准精度等指标,设置主惯导和子惯导的相关参数,如表1所示。

表1 传递对准仿真的相关器件参数Table 1 Related device parameters of transfer alignment simulation
3.1 静止和匀速直线运动状态下的传递对准仿真
静止和匀速直线运动是车辆最常见的运动状态,这两种状态下惯导系统的陀螺和加速度计敏感量基本不变,因此对于对准滤波器的激励是相同的,在此作为一种状态进行分析。
首先,对载车静止状态下的传递对准结果进行分析。设载车所在地的经度、纬度、高度分别为λ=112.993°、L=28.222°、h=380m,在静态情况下进行传递对准仿真,静止状态下陀螺和加速度计的输出如图2、图3所示。

图2 静止状态下陀螺的输出Fig.2 Diagram of gyroscope output under static condition
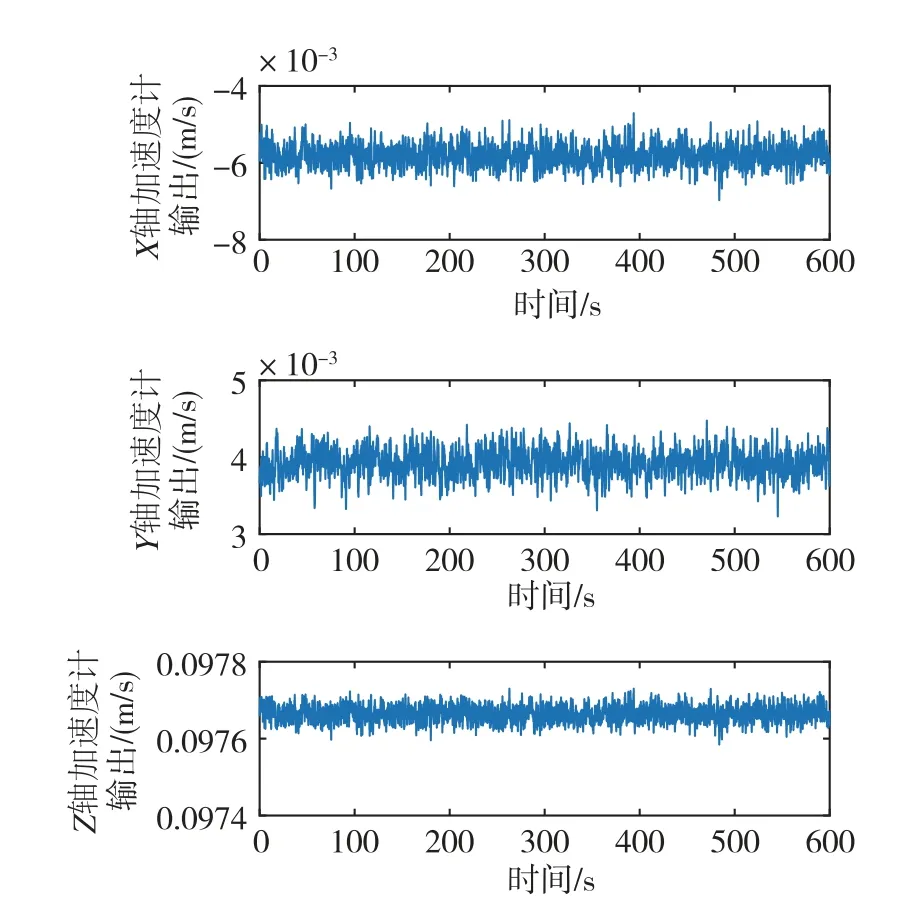
图3 静止状态下加速度计的输出Fig.3 Diagram of accelerometer output under static condition
对准过程中子系统的对准姿态结果如图4所示。

图4 静止状态下传递对准子系统姿态误差估计值收敛过程Fig.4 Convergence process of subsystem attitude error estimation under static condition
在静态状态下,采用“姿态+速度”匹配的传递对准方式,其两个水平姿态误差的收敛速度较快,航向角对准误差的收敛速度较慢,对准300s之后其结果才趋于收敛,并且后续姿态结果具有较大振荡。在600s对准结束后,系统俯仰角对准误差为-3.76′,横滚角对准误差为-12.64′,航向角对准误差为16.43′。可见静止状态下,由于系统缺乏激励,对准过程收敛较慢且对准误差相对较大。
3.2 加/减速交替状态下的传递对准仿真
当发射车处于加/减速交替状态下,由加速度计敏感加速度变化实现对传递对准的姿态激励。设载车初始速度为V0=[0 0 0]T,初始姿态为At t0=[0 0 0]T, 载车以1.5m/s2的加速度沿直线加速行驶10s后,再以0.5m/s2的加速度减速行驶10s,如此交替往复,行驶60s后陀螺和加速度计的输出如图5、图6所示。
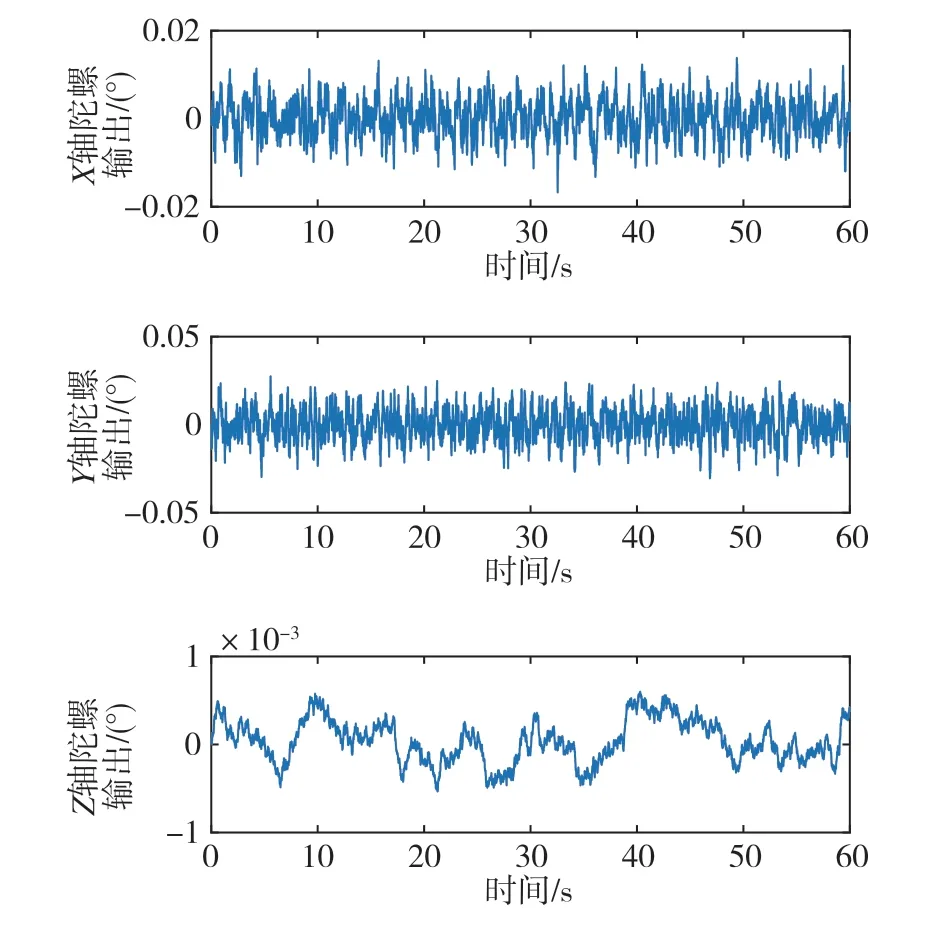
图5 加/减速交替状态下陀螺的输出Fig.5 Diagram of gyroscope output under acceleration/deceleration alternate condition
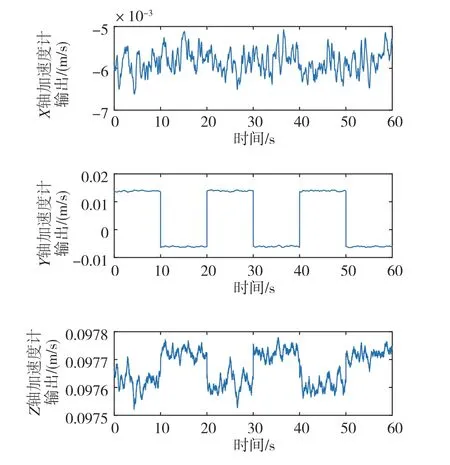
图6 加/减速交替状态下加速度计的输出Fig.6 Diagram of accelerometer output under acceleration/deceleration alternate condition
在载车运动开始时即进行传递对准,对准结果如图7所示。
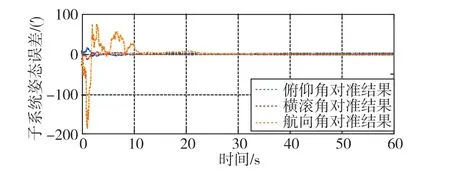
图7 加/减速交替状态下传递对准子系统姿态误差估计值收敛过程Fig.7 Convergence process of subsystem attitude error estimation under acceleration/deceleration alternate condition
在加/减速交替状态下,载车在第一个10s加速结束后进入减速过程,俯仰角对准误差、横滚角对准误差和航向角对准误差均快速收敛,在一个加减速周期结束后(20s后),三个误差量迅速收敛。在对准25s左右,三个姿态角完全收敛,此时姿态修正后的结果为:系统俯仰角对准误差为1.58′,横滚角对准误差为-2.42′,航向角对准误差为0.22′。由对准结果可知,系统的收敛速度明显较单纯加/减速状态下收敛速度更快,对准时长较静态状态下减少了一个数量级左右,且对准精度明显提高,尤其是航向角的对准精度提高尤为明显。
3.3 S形行进状态下的传递对准仿真
当载车在路面以S形方式行进时(即载车在进行S形机动),陀螺敏感载车角转动的变化实现对传递对准的姿态激励。设载车在50s之前匀速行驶,在50s时进行时长为20s的±1(°)/s的S形机动,如此交替往复,行驶140s后陀螺和加速度计的输出如图8、图9所示。

图8 S形行进状态下陀螺的输出Fig.8 Diagram of gyroscope output under S-shaped moving condition

图9 S形行进状态下加速度计的输出Fig.9 Diagram of accelerometer output under S-shaped moving condition
S形机动的传递对准结果如图10所示。

图10 S形行进状态下传递对准子系统姿态误差估计值收敛过程Fig.10 Convergence process of subsystem attitude error estimationunder S-shaped moving condition
由图10可知,载车在50s时进入S形机动状态,在50s左右三个姿态误差量有明显的收敛过程,在转动开始时姿态就迅速收敛到小量,说明载车在由直线行驶进入转动的过程对传递对准的姿态误差具有很大的激励作用。在140s第二次机动完成后,最终姿态修正后的结果为:系统俯仰角对准误差为0.176′,横滚角对准误差为-0.135′,航向角对准误差为1.440′。可以认为,当载车在刚完成S形机动状态下,传递对准的姿态误差处于小量,当系统重新进行匀速直线运动时,会导致对准精度的降低。
在陆基导弹发射车的实际工作过程中,S形机动是一种很容易实现的运动方式,可以在短时间内完成,且受车辆所在场地限制小,因此可以认为这种激励方式具有很高的可操作性。
通过以上多种运动状态下的仿真,可以总结如下:所设计的动态传递对准方法可行,在载车处于机动状态下,对准5min以内滤波器估计姿态误差收敛。在载车处于加/减速交替行进和S形机动状态下,其效果最好。因此在实际工作过程中,可以通过刻意驾驶车辆进行相关机动方式,以缩短对准时间、提高对准精度。
4 行进间快速传递对准动态跑车实验
实验设备主要包括:高精度激光陀螺捷联惯导系统(作为主惯导)、低精度激光陀螺捷联惯导系统(作为子惯导)、车载GPS(定位精度10m以内)、导航计算机、不间断电源。其中,主惯导安装在载车后部,子惯导安装在载车中部,两惯导系统均采用螺钉直接固定于车内地板,以确保两系统在短时间内相对姿态的稳定。
主子惯导系统安装完成后,通过两系统在实验车内的长时间高精度对准,完成了两系统之间的安装误差测量(两惯导之间存在(1.3221°,2.4215°,7.3290°)安装误差)和杆臂补偿。整体实验通过主惯导与GPS组合的方式给出相对准确的姿态、速度和位置,相关测量值通过两系统的安装误差矩阵转换后作为子系统的基准量。由于载车不可避免出现形变,因此此种方式给出的姿态参考基准必定存在误差。在本章节中,也结合了子惯导传递对准后一段时间的纯惯性导航结果间接反映系统的对准精度。
跑车实验在湖南长沙开展,跑车全程路线如图11所示。
实验全程主惯导陀螺和加速度计的输出如图12所示,子惯导陀螺和加速度计的输出如图13所示。

图12 行进间快速传递对准实验主惯导惯性器件输出Fig.12 Outputs of main-INS sensors in dynamic transfer alignment experiment
实验全程主惯导采用位置组合导航的方式,全程主惯导系统的姿态、速度以及定位结果如图14所示。
主惯导对准完成后,实验车由(113.1204°,28.2947°)位置出发向东北方向行驶,然后掉头,全程经过多次加/减速、转弯等机动模式,最终在(113.1318°,28.2269°)位置停车,全程实验时长近60min。
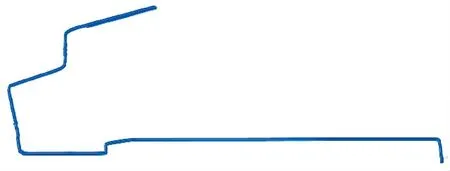
图11 行进间快速传递对准实验路线Fig.11 Diagram of dynamic transfer alignment experiment route

图13 行进间快速传递对准实验子惯导惯性器件输出Fig.13 Output of sub-INS sensors in dynamic transfer alignment experiment

图14 行进间快速传递对准实验主惯导输出导航结果Fig.14 Navigation results of main-INS in dynamic transfer alignment experiment
4.1 匀速状态下的动态传递对准结果
载车从开始出发后进行第一次动态对准,对准时长为50s,载车在此段时间内接近直线行驶,速度输出如图15所示。
由图15可知,在此段时间内,实验车接近匀速行驶。对准过程中的主惯导纯惯性输出姿态如图16所示,传递对准滤波器估计子惯导姿态误差如图17所示。

图16 匀速状态下主惯导纯惯性输出姿态Fig.16 Attitude of main-INS under constant speed condition
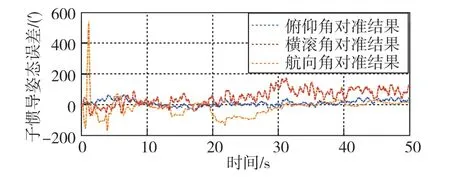
图17 匀速状态下传递对准滤波器估计子惯导姿态误差Fig.17 Filter estimator error of sub-INS under constant speed condition
由对准结果可知,在对准初期滤波器对三个姿态误差的估计值迅速收敛。对准50s后,子惯导的相对姿态误差为:俯仰角46.3987′,横滚角124.8458′,航向角19.9414′。对准完成后,子系统进行10min纯惯性导航,系统纯惯性输出的定位误差如图18所示。

图18 匀速状态下子惯导纯惯性导航定位误差结果Fig.18 Positioning error of sub-INS under constant speed condition
系统行进间对准后进入导航10min,东向定位误差最大值为62.2m,北向定位误差最大值为-315.4m。
4.2 转弯状态下的动态传递对准结果
实验车的运动路径存在多次转弯及掉头设计,以验证行进间快速传递对准在转弯状态下的对准精度。首先,采用载车在4.5min时的掉头过程进行行进间传递对准分析,载车在对准过程中的速度如图19所示。

图19 转弯状态下实验车的运行速度Fig.19 Velocity of test vehicle under turning condition
由图19可知,在50s的对准过程中,载车由向北行驶掉头开始向南行驶,掉头动作在对准进行至23s左右时开始。传递对准50s中,主惯导的输出姿态如图20所示,传递对准滤波器估计姿态误差如图21所示。

图20 转弯状态下主惯导纯惯性输出姿态Fig.20 Attitude of main-INS under turning condition

图21 转弯状态下传递对准滤波器估计子惯导姿态误差Fig.21 Filter estimator error of sub-INS under turning condition
由图20和图21可知,在对准的前23s,系统处于匀速直线行驶状态,行进间对准的输出姿态误差量级和4.1节中匀速直线行驶状态下的对准姿态误差量级接近,且姿态输出有接近100′左右的振荡。在23s掉头后,三个姿态角误差明显进一步收敛,输出姿态的振荡明显减小,尤其是俯仰角和航向角的振荡误差都在20′以内,最终50s后对准结果如下:俯仰角误差为3.366′,横滚角误差为1.741′,航向角误差为16.750′。三个姿态误差明显小于4.1节中匀速行驶过程中的对准结果,可以认为对准过程中的掉头动作可以有效激励传递对准中的姿态误差,提高对准收敛时间和对准精度。为进一步验证对准姿态精度,采用对准完成后10min的数据进行纯惯性导航验证,结果如图22所示。
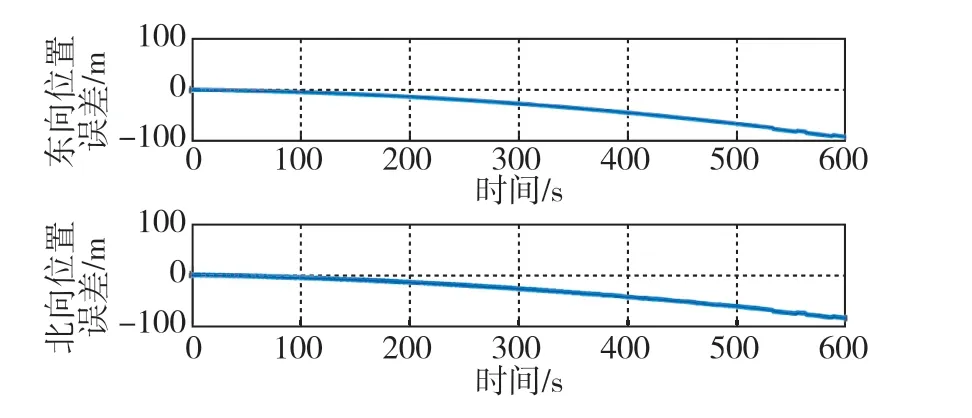
图22 转弯状态下子惯导纯惯性导航定位误差结果Fig.22 Positioning error of sub-INS under turning condition
子惯导纯惯性导航10min,东向定位误差最大值为-91.397m,北向定位误差最大值为-84.169m,定位精度明显优于4.1节中的导航结果。因此从对准后的导航验证中,同样可以得到转弯对行进间传递对准具有有效的激励作用。
4.3 加/减速状态下的动态传递对准结果
车载实验存在多次车辆加/减速过程,为验证在加/减速过程中行进间快速传递对准的效果,在实验进行了27.5min时对实验车加/减速过程进行传递对准,实验车的速度如图23所示。

图23 加减速交替状态下实验车的运行速度Fig.23 Velocity of test vehicle under acceleration/deceleration alternate condition
传递对准50s中,主惯导的输出姿态如图24所示,传递对准滤波器估计姿态误差如图25所示。
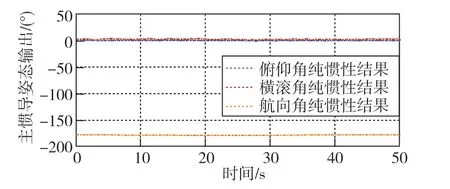
图24 加减速交替状态下主惯导纯惯性输出姿态Fig.24 Attitude of main-INS under acceleration/deceleration alternate condition

图25 加减速交替状态下传递对准滤波器估计子惯导姿态误差Fig.25 Filter estimator errorof sub-INS under acceleration/deceleration alternate condition
传递对准50s过程中,载车前20s处于加速状态,20s~30s处于减速状态,加速度在0.15m/s2左右。对准姿态误差很快趋于收敛,三个姿态角对准结果如下:俯仰角姿态误差为8.7400′,横滚角姿态误差为-3.3424′,航向角姿态误差为50.6637′。采用对准结果进行10min纯惯导导航验证,结果如图26所示。

图26 加减速交替状态下子惯导纯惯性导航定位误差结果Fig.26 Positioning error of sub-INS under acceleration/deceleration alternate condition
纯惯性导航10min,东向定位误差最大值为-141.2570m,北向定位误差最大值为-30.0435m。由导航结果可知,对准姿态角误差优于匀速状态下结果,但由于车载状态下加速度较慢,因此激励效果不明显。
5 结论
本文针对陆基导弹发射车动态传递对准的实现方案进行了研究,对对准方案、误差建模以及补偿方法进行了分析,确定了对准匹配方式,完成了滤波器的搭建,并通过模拟载体不同运动状态下的惯导输出,对所设计的传递对准算法进行了仿真分析,提出了相应的陆基导弹发射车在对准过程中的运动方式,用以提高对姿态误差的激励。本文综合考虑了不同运动状态下的动态传递对准效果,验证了所设计的行进间快速对准方案的可行性和精度。由实验结果可知,载车在加/减速和转弯状态下可以在50s内实现子惯导系统的有效对准,相关实验结果和仿真结果基本吻合。因此可以认为,在陆基巡航导弹实际行进间传递对准过程中,通过载车适当进行加/减速和转弯等机动动作,可以有效提高弹体的对准精度,实现弹体在短时间内的高精度对准。通过理论分析、仿真和实验验证,本方案具备可行性,能够保证在高精度导航的条件下快速完成初始对准,能够有效缩短车载陆基导弹发射准备时间,优化发射流程,提高其生存概率,对作战部队实现快速发射、提升作战效力具有积极意义。