圆盘多环内双梁谐振陀螺的结构设计和制备方法
2021-09-04李志伟张卫平谷留涛刘朝阳朱甲强
李志伟,张卫平,谷留涛,刘朝阳,朱甲强
(1.微米/纳米加工技术国家重点实验室,上海 200240;2.上海交通大学电子信息与电气工程学院微纳电子学系,上海 200240)
0 引言
陀螺是一种能够敏感检测载体角度或角速度的惯性器件,在姿态控制和导航定位等领域有着非常重要的作用。随着国防科技和航空、航天工业的发展,惯性导航系统对于陀螺的要求也向着低成本、小体积、高精度、多轴检测、高可靠性、能适应各种恶劣环境的方向发展。微机电系统(Micro Electro Mechanical System,MEMS)利用微电子技术在微纳加工制造等领域的应用使得器件小型化成为可能,在此基础上,基于Coriolis效应的MEMS微陀螺逐渐兴起。基于MEMS技术的微陀螺采用微纳制造技术批量加工,其成本、尺寸、功耗都很低,而且环境适应性、工作寿命、可靠性、集成度与传统技术相比有极大的提高。多环型MEMS陀螺由于其全对称结构而具有谐振频率匹配好、对振动和加速度抑制能力强等优点,同时环形谐振器没有大的集中质量块从而具有更好的抗冲击性能。因此,MEMS多环谐振陀螺成为惯性器件领域的研究热点[1-4]。
最早的环形陀螺为单环陀螺。日本的Silicon Sensing公司所制造的单环陀螺采用电磁驱动和测量的原理,谐振器仅为一圈环。美国的喷气推进实验室和波音公司在单环谐振陀螺的基础上提出了多环结构的MEMS碟形陀螺方案,即多环谐振盘式陀螺。2013年,美国斯坦福大学研制出了一种多环谐振陀螺,该陀螺以中心锚点为支撑,采用多圈同心圆环作为谐振结构[5]。国内对多环陀螺的研究起步较晚。2017年,上海交通大学制备出直径为4mm的硅微圆盘多环谐振陀螺,并对有关性能的测试方法作了介绍[6-7]。2018年,国防科技大学研制出一种通过悬挂质量块来降低谐振频率的多环陀螺,同年还提出了一种类似于蜂巢状的多环新型谐振器[8]。苏州大学也于2018年提出了蜘蛛网状的新结构[9]。
基于以上研究,本文提出了一种圆盘多环内双梁谐振陀螺,这一结构设计通过内双梁的柔性降低了多环谐振子的刚度,可以增加谐振子的灵敏度,保持了环式陀螺的高对称性。同时,本文也对其结构设计和加工工艺进行了研究。
1 圆盘多环内双梁谐振陀螺的结构设计
本文所设计的圆盘多环内双梁谐振陀螺的三维结构图如图1所示,其结构主要由基底、圆盘多环内双梁谐振器以及一组分布在圆盘多环内双梁谐振器外围边缘的电极构成。

图1 圆盘多环内双梁谐振陀螺的三维结构图Fig.1 Three-dimensionalstructure diagram of disc multi-ring resonator gyroscope with inner double-beams
其中,谐振器是圆盘多环内双梁谐振陀螺的核心结构,直径为4mm的多环谐振器包含了中央圆柱、8个双梁孤立圆环、10个同心圆环以及16组辐条,其结构示意图如图2(a)所示。中央圆柱与基底相连,位于谐振器的中心位置,起到固定支撑的作用;多个同心圆环的中心轴均与中央圆柱的中心轴重合,以尽可能实现结构对称、受力均匀,且多个同心环宽度相等,环与环之间间隔相等;同心圆环之间通过多个辐条相连,同心圆环间的辐条均匀间隔排列,辐条个数为16个,每组辐条间隔角度为22.5°;8个双梁孤立圆环均匀分布,间隔45°,其两端均分别与中央圆柱和同心圆环中最小圆环内侧相连;辐条、双梁宽度与同心圆环的宽度相同。
电极将多环陀螺产生的信号传输到外部电路,电极与多环谐振器的相对位置如图2(b)所示。电极分布在圆盘多环内双梁孤立圆环谐振器外围边缘,且每个电极分别与基底相连。电极为8个扇环形状的结构,8个电极的位置与8个双梁孤立圆环的位置一一对应,且每个电极的中心轴均与圆盘多环内双梁孤立圆环谐振器的中心轴重合,8个电极与同心圆环中最大圆环之间的间隙距离均相等,电极包含4个驱动电极和4个检测电极,驱动电极和检测电极沿谐振器外围边缘均匀间隔排布。
基底起到承载整个器件的固定支撑作用,其结构如图2(c)所示。基底上设有凸出的部分,凸出的部分包括中央圆柱和8个外围边缘离散的扇环部分。其中,中央圆柱和8个外围边缘离散的扇环部分的高均相等,8个外围边缘离散的扇环部分等间距分布且每个扇环部分的宽均相等。基底上最外围边缘为8个等间距分布的电极片,电极片与外围边缘离散的扇环部分的位置一一对应,电极片分别与外围边缘离散的扇环部分用导线相连,且电极片与外围边缘离散的扇环部分之间的距离均相等,每个电极片的宽度、厚度均相等。基底上的中央圆柱上将引出一条引线,用于接地或接零电势。

图2 圆盘多环内双梁谐振陀螺的内部结构示意图Fig.2 Internalstructure diagram of disc multi-ring resonator gyroscope with inner double-beams
2 圆盘多环内双梁谐振陀螺的模态分析
MEMS多环陀螺在工作时,同心圆环谐振子的振动形态比较复杂。因此,本文利用有限元软件对圆盘多环内双梁谐振陀螺的振型以及每个模态的特征频率进行分析。首先,利用Comsol有限元软件建立内双梁及同心圆环谐振结构的机械模型,并进行网格化分,如图3所示。

图3 圆盘多环内双梁谐振陀螺模型及网格划分图Fig.3 Model and meshing diagram of disc multi-ring resonator gyroscope with inner double-beams
之后,对陀螺进行振动模态仿真分析。根据有限元分析的结果,谐振频率为36938Hz和36975Hz的振动模态正好对应于波数n=2的面内“圆-椭圆-圆”四波腹振动模态,其振型如图4所示。当驱动信号使陀螺谐振子共振时,可激励出谐振子在驱动轴方向的振动,称为驱动模态,如图4(a)所示。当敏感轴有输入角速度Ωz时,由于科氏力的作用,可激励出谐振子在检测轴方向的振动,称为检测模态,如图4(b)所示。对于完全对称的环形谐振结构,这两种模态的振动波腹与波节是严格正交的,而且这两种振动模态的振动主轴(波腹轴)之间的夹角是45°。本文所设计的圆盘多环内双梁结构工作模态与干扰模态最小频差为2772Hz,驱动和检测模态频差为37Hz,既可以远离环境振动的干扰,也能在较高灵敏度的基础上保证带宽。


图4 谐振陀螺四波腹振动模态示意图Fig.4 Schematic diagram of resonant gyroscope four-antinodes vibration modal
3 圆盘多环内双梁谐振陀螺的实施工艺设计
通过MEMS工艺最终制备出来的圆盘多环内双梁谐振陀螺主要有三个部分:1)基底层;2)连接于基底上的锚点层;3)连接于锚点上的器件层。器件层的制备都是基于成熟的硅微工艺,因此对于整个工艺流程而言,关键在于中间锚点层的制备和其与另外两层的连接问题。针对这一问题,本文提出了两种解决方案。
3.1 基于SOI片的工艺设计
第一种方案利用SOI片的三层结构,device layer作为器件层,oxide layer作为锚点层,handle layer作为基底层。然后,直接在device layer上制作出器件层,暴露出oxide layer。最后,通过各向同性湿法腐蚀,控制好时间,使得器件层悬浮结构下的二氧化硅被完全腐蚀掉的同时,非悬浮结构下的二氧化硅还有保留,这些保留的二氧化硅就是锚点层。具体的工艺流程如图5所示。
步骤1:如图5(a)所示,对SOI片进行预处理。SOI片表面可能存在热氧化层,采用稀释的氢氟酸浸泡30min,然后用去离子水清洗并甩干,完成SOI片的清洁。
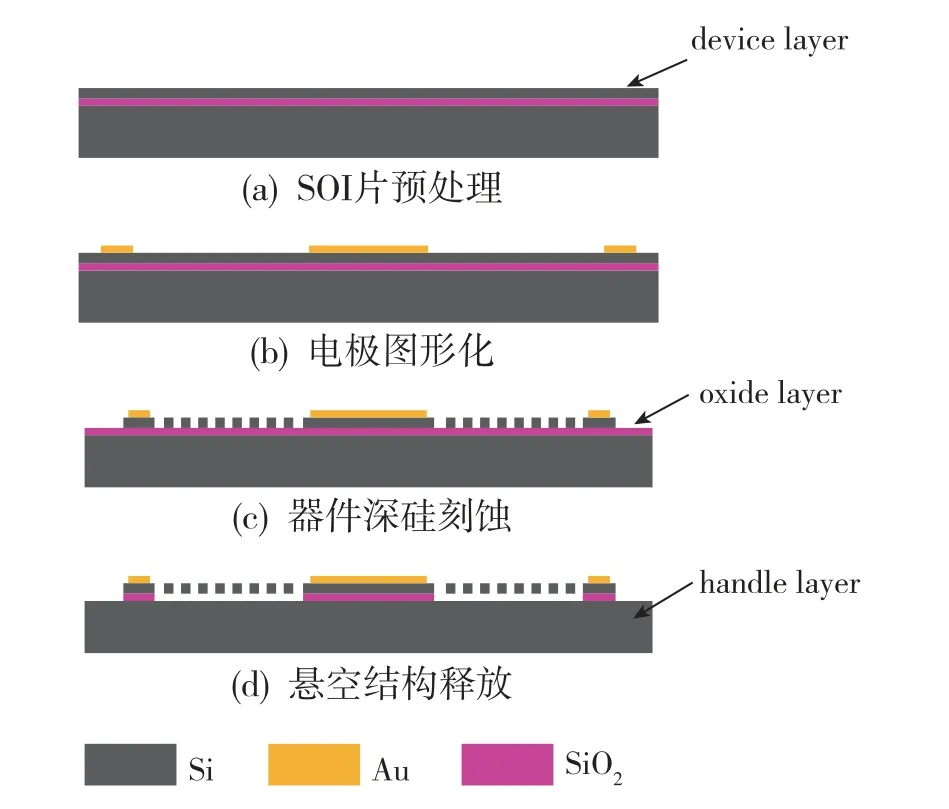
图5 基于SOI的工艺流程图Fig.5 Process flowchart based on SOI
步骤2:如图5(b)所示,制作电极并图形化。在SOI片的器件层表面溅射Au电极材料,并利用光刻得到电极图形,然后采用离子束刻蚀的方式对Au进行刻蚀,得到电极图案,刻蚀完成后用丙酮去除光刻胶。
步骤3:如图5(c)所示,对器件进行刻蚀。首先利用光刻在器件层表面得到谐振器的同心圆环、辐条、双梁结构等图形,之后利用深反应离子刻蚀(Deep Reactive Ion Etching,DRIE)对SOI片的器件层硅进行刻蚀,得到多环结构。这一步是得到结构图形的关键步骤,要注意光刻的精准度,这直接决定了最终结构的质量。
步骤4:如图5(d)所示,悬空结构的释放,这一步是得到悬空谐振结构的关键。采用湿法各向同性的腐蚀方式对悬空结构下方的氧化硅进行释放,这一步需要进行对比实验探究。腐蚀时间过长会导致过度释放,将需要保留的氧化硅也释放掉;而腐蚀时间过短则无法将悬空结构完全释放,导致器件无法工作。
这种方法很简便,工艺实施比较容易,但是也有明显的缺陷。这种方法只适用于锚点面积明显大于悬空结构面积的器件,因为释放的过程是很难准确控制的。对于小面积的锚点,极有可能在释放过程中也被腐蚀掉,从而破坏结构。即便是比较大的锚点,也必然会发生一定的腐蚀,即使不至于破坏结构,但是器件的对称性、结构完整性也会受到损伤。因此,本文提出了另一种更加可靠的工艺方案。
3.2 基于阳极键合的工艺设计
这种方案的总体思路是器件层与基底层采用分立的材料来进行制作,之后通过阳极键合的方式把二者结合起来。通过先进行表面结构加工再键合的方式直接得到悬空的结构,从根本上避免了湿法释放的环节,因而对过度释放或者释放不足的缺陷进行了克服,具体的工艺流程如图6所示。
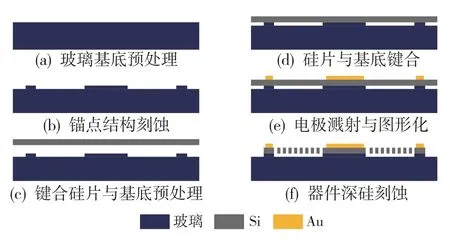
图6 基于阳极键合的工艺流程图Fig.6 Process flow flowchart based on anodic bonding
步骤1:如图6(a)所示,对玻璃基片进行清洗。先用配比好的溶液(H2O2∶H2SO4=1∶3)浸泡20min,然后用去离子水清洗并甩干,最后在180℃烘箱中烘30min。
步骤2:如图6(b)所示,对锚点结构进行刻蚀。这一步可以采用湿法腐蚀或者干法刻蚀的方式对玻璃基底进行刻蚀,以得到锚点结构,同时获得器件悬空的空间。
步骤3:如图6(c)所示,对刻蚀完成的基底去除光刻胶和刻蚀掩模并进行清洗,同时对待键合的硅片也进行清洗。
步骤4:如图6(d)所示,将清洗后的玻璃基底和单晶硅片通过阳极键合工艺键合在一起。其中,键合温度为350℃,直流电压为800V,压强为0.25MPa。
步骤5:如图6(e)所示,制作电极并图形化。在SOI片的器件层表面溅射Au电极材料,并利用光刻得到电极图形,然后采用离子束刻蚀的方式对Au进行刻蚀,得到电极图案,刻蚀完成后用丙酮去除光刻胶。
步骤6:如图6(f)所示,对器件进行刻蚀。利用光刻在器件层表面得到谐振器的同心圆环、辐条、双梁结构等图形,之后利用DRIE对SOI片的器件层硅进行刻蚀,直接得到悬空的多环结构。
4 结论
本文提出了一种新型的圆盘多环内双梁孤立圆环谐振陀螺,并对其基底、电极、谐振器三部分主要结构进行了设计,对多环谐振器的振动原理进行了模态分析,并提出了基于SOI片和基于阳极键合的两种不同的MEMS加工工艺,本文的研究为今后进一步研究、制备、测试圆盘多环内双梁谐振陀螺奠定了一定基础。