基于稀疏低秩特性的水下非均匀光场偏振成像技术研究*
2021-09-03刘飞孙少杰韩平丽2赵琳邵晓鹏
刘飞 孙少杰 韩平丽2)3) 赵琳 邵晓鹏†
1) (西安电子科技大学物理与光电工程学院, 西安 710071)
2) (西安电子科技大学, 西安市计算成像重点实验室, 西安 710071)
3) (中国科学院光电技术研究所, 中国科学院光束控制重点实验室, 成都 610209)
4) (西安电子科技大学前沿交叉研究院, 西安 710071)
针对浑浊水体偏振成像时由于强散射作用导致的背景散射光分布不均匀且目标信息被淹没, 无法有效解译, 难以实现清晰化成像的问题, 提出基于稀疏低秩特性的水下非均匀光场偏振成像技术.该技术利用散射光场中偏振信息的共模抑制特性消除非均匀性, 结合水下散射光场中背景信息纹理单一、信息相关性高以及目标信息空间占比小的特点, 建立偏振域的稀疏-低秩信息分析处理模型, 有效分离目标和背景信息, 重建高对比度清晰目标图像.实验结果表明, 基于稀疏低秩特性的水下非均匀光场偏振成像技术不仅能够有效地提升浑浊水下图像的对比度, 复原细节信息, 而且能够有效地抑制非均匀强散射, 在水下偏振成像领域具有良好的应用前景.
1 引 言
实现浑浊水体的清晰化光学成像对如2015年重庆“东方之星”号客轮翻沉等事故的水下救援意义重大, 能够大幅提高搜救效率挽救生命, 并为搜救人员提供安全保障[1-3].浑浊水中悬浮颗粒种类和分布复杂、密度高, 主动成像受非均匀强散射作用影响, 产生“帷幔效应”[4], 导致无法有效地分离目标信息和背景散射信息, 大幅降低图像对比度,缩短成像距离[5-9].因此, 解决浑浊水下成像中非均匀强散射的问题, 实现浑浊水下清晰化成像, 是水下成像领域的研究难点和热点.
目前, 水下光学成像技术主要包括基于图像处理技术的水下清晰化成像技术和基于光学成像模型的复原技术.前者处理速度快、成本低, 能一定程度提升成像质量, 但多数情况下提升有限, 且环境适应性较弱[10-15].基于光学成像模型的复原技术可以一定程度弥补图像处理技术的不足, 但多存在成像系统复杂、成本高等问题, 如距离选通成像技术[16]、结构光成像技术[17]、同步扫描成像技术[18]等.相比之下, 水下偏振成像技术[19-21]有设备简单、操作方便、性价比高等特点.Treibitz 和Schechner[22], Huang等[23]和Hu等[24]用主动偏振光源照射目标, 获取两张正交偏振态图像并利用二者之间的差异分离目标信息光与散射光, 提高了水下成像清晰度.Liu等[25]利用散射对波长的选择性, 提出了一种高浑浊度水下成像方法, 提高了高浑浊水体中的成像距离和图像对比度.上述方法均能够一定程度提高水下成像质量, 但对浑浊水体中非均匀强散射对成像结果的影响未进行针对性研究.
针对浑浊水下成像中的非均匀强散射问题, 本文提出一种基于散射光场稀疏低秩特性的浑浊水下偏振成像技术.利用偏振信息的共模抑制特性建立模型消除水下非均匀强散射影响; 结合散射光场中背景散射图像低秩特性和目标信息图像的稀疏特性, 利用稀疏低秩分解法有效分离背景和目标信息, 实现浑浊水体中的清晰成像.实验结果表明,该方法能够有效地抑制浑浊水下成像中的非均匀强散射, 提升成像效果.
2 浑浊水体散射光场强度分布特性研究
光在水下传播过程中的散射情况如图1所示,随着传播距离增加, 散射程度不断增强.通常可根据水中散射程度的差异性将成像区域分为弹道光区域、散射增强区域和随机游走区域; 弹道光区域距离短, 直接成像即可获得较好观测效果; 随机游走区域内光波散射作用强, 故无法直接获取任何目标信息[26].在如图1(a)所示的散射增强区内, 随着传输距离或水体浑浊度的增加, 光波的散射程度急剧增强, 散射光场中背景散射光强度分布 Iscat(x,y)如下式所示[22]:

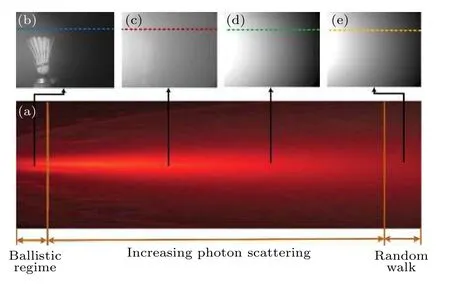
图1 浑浊水体散射光场特性分析Fig.1.Scattering conditions of light at different turbidity.
其中 Rcam(z) 为场景中任一点到探测器之间的距离;Isource(z) 为光源的辐照度; θ ∈[0,π] 是光波在散射介质中的散射角; b 为介质的散射系数, 表征了介质在某一个角度方向 θ 上的后向散射饱和度; c 为衰减因子.由(1)式可知, 场景中的背景散射光强度分布情况与散射角 θ 以及光源 Isource(z) 密切相关且呈非均匀分布, 如图1(b)-(e)所示.图1(b)-(e)中背景散射强度随水体散射增强明显增强, 且在强散射区域的散射信息呈现明显的非均匀分布, 这使得传统通过无目标区域估算背景散射光偏振度的方法难以准确估算场景中背景散射信息的空间分布, 导致成像效果受限.图2所示为图1(b)-(e)中第150行像素强度值变化情况, 可见随水体散射程度增加, 场景图像的非均匀性逐步加剧.

图2 不同散射程度的强度变化曲线Fig.2.Intensity variation in different scattering area.
受强散射影响的浑浊水下图像虽然呈现明显的非均匀分布特性, 但在视觉上却具有高度冗余性, 背景纹理单一, 所包含信息相关性高, 符合图像的低秩性特点, 因此水下成像时的单一成像背景可视为存在于一个低秩子空间.而目标信息一般在整个水下场景中占比较小, 符合稀疏性的特点, 因此可将目标视为存在于一个稀疏的子空间.结合浑浊水下图像中散射光的低秩性和目标信息的稀疏性特点, 可以采用光场矩阵稀疏-低秩特性对散射增强区域图像进行处理, 提高成像质量, 如下式所示[27,28]:

其中 Iscat(x,y) 和 Iobj(x,y) 分别表示探测器接收到的背景散射光强度和目标信息光强度; Itotal(x,y) 为探测器接受到的强度信息; R ank(·) 表示矩阵的秩函数, 即非零奇异值的个数; l0范数 ‖ ·‖0用来衡量矩阵的稀疏性; λ 为正则化参数, 用来平衡低秩矩阵和稀疏矩阵对优化问题的影响.实际成像过程中, 背景散射强度的非均匀分布导致场景图像中背景散射光图像的低秩性大幅下降, 如图1(d)所示.因此, (2)式所示的优化函数难以获得最优解, 影响最终算法处理效果.为提高成像质量, 利用偏振共模抑制原理对图像进行均匀化处理, 进而有效地提高场景图像的稀疏-低秩性.
3 基于稀疏低秩分解的水下清晰化成像技术
3.1 偏振共模抑制原理
水下偏振成像中探测器所接收到的图像是由经水体自身散射后的背景散射光 Iscat和经目标反射的目标信息光 Iobj两部分组成.对于探测器上每个像元 ( x,y) 的偏振光进行正交分解, 得到两个正交线偏振分量 I⊥(x,y) 和 I//(x,y) , 通过(3)式所示形式进行偏振信息分解.式中PDI为偏振差分图像, PSI表示偏振求和图像. P SItotal(x,y) 和PDItotal(x,y) 图像通道就是具有均匀分布的偏振方位角图像中的两个主成分, 即是偏振方位角图像中具有最大不相关信息的最优通道.
根据Malus Law可知, 偏振差分图像的实质就是利用正交分解的两个偏振分量信息进行差分,即利用光学检偏器的共模抑制作用来滤除背景.对于水下主动偏振成像技术, 由于水中粒子的强散射退偏作用, 导致探测器所接收到的目标信息光和背景散射光呈现部分偏振特性, 且两者的偏振方向具有一定的差异性.因此, 利用偏振差分成像PDItotal(x,y) 的共模抑制特性能够在有效保留目标信息光的同时滤掉造成图像非均匀的光强信息, 以此有效地提升场景图像的低秩性.
3.2 PDI的稀疏低秩分解
偏振差分成像技术利用探测器采集到的偏振方位角图像中的最大不相关信息的最优通道之间的共模抑制特性滤除非均匀分布的强度信息, 提升图像的低秩性.因此以处理后的 PDItotal(x,y)∈Rm×n图像为输入数据, 结合(2)式所示表征方式, 则其可分解为一个低秩空间矩阵 PDIscat(x,y)∈Rm×n和一个稀疏空间矩阵 P DIobj(x,y)∈Rm×n, 其中两者均未知.但是由于(2)式所示秩函数 R ank(·) 的非凸不连续性和 l0范数的离散特性, 导致(2)式所示优化问题为病态问题, 难以求解.因此, 引入优化的矩阵截断核范数来代替秩函数[29],并引入离散余弦变换对低秩矩阵进行稀疏化优化处理, 如(4)式所示.

其中 G (·) 表示正向变换算子, 利用 W 替换变量PDIscat, 即 W =‖G(PDIscat)‖ ; l1正则化用于提升PDIscat的稀疏 性, 参数 λ 和 γ 分别用于 平衡低秩分量与空间域稀疏分量和变换域低秩分量, A 和 B为对矩阵 P DIscat进行奇异值分解所得的左奇异值矩阵和右奇异值矩阵进行截断得到.对于(4)式所示的优化问题, 构建如(5)式所示的增广拉格朗日函数进行迭代求解.

式中, Y 和 P 是拉格朗日乘子; µ >0 为惩罚参数;算符 〈.,.〉 表示矩阵内积; ‖ ·‖F表示矩阵的Frobenius范数.根据交替方向迭代法, 利用(6)式所示形式进行变量控制依次迭代式中变量.

联立(5)式和(6)式, 结合矩阵的奇异值阈值算法SVT和逐元素软阈值运算ST对上述优化问题的封闭解进行求取, 如(7)式所示.

式中, σ =(σ1,σ2,···,σr)T为矩阵SVD分解后的特征值, 即 Q =Udiag(σ)VT.通过上述稀疏低秩分解方法及迭代更新模型, 偏振差分 P DItotal(x,y) 图像得到稀疏低秩最终解将偏振差分图像有效分解为背景散射光图像和目标信息光图像, 实现水下清晰化成像.
4 实验结果与分析
为验证和说明本文方法的有效性, 根据图3所示的原理图搭建实验.通过脱脂牛奶(分子大小为0.04-0.3 µm)和自来水混合溶液来模拟实际海洋环境中悬浮粒子对光波的散射和吸收情况.实验过程中逐步加入50-100 mL脱脂牛奶来模拟散射环境, 其光学厚度为1.14-2.80.实验中白光光源通过起偏器来产生完全偏振光, 照射材料为高透光的聚甲基丙烯酸甲酯(polymethyl methacrylate,PMMA)水箱, 水箱规格为800 mm × 500 mm ×400 mm, 实验中注入溶液高度至300 mm, 通过放置了检偏器的Basler acA 2040-900 NIR图像传感器采集偏振方位角图像.

图3 水下偏振成像原理图Fig.3.Schematic of underwater polarization imaging.
图4 所示为加入80 mL脱脂牛奶散射溶液条件下的实验结果, 实验中目标为35 mm × 20 mm的纸制漫反射物体, 成像位置距探测器800 mm.图4(a)为原始水下强度图像, 其背景散射光呈现明显的非均匀分布特性, 且目标信息光几乎被背景散射光完全淹没.图4(b)所示为利用散射光场偏振共模抑制特性校正后的图像, 该结果表明偏振共模抑制不仅能够有效去除背景散射光的非均匀性,而且有效地滤除掉了一定的强散射背景, 凸显出了目标信息.结合本文所述的散射光场子空间的稀疏-低秩特性对图4(b)重建所得的背景散射光与目标信息光图像如图4(c)和图4(d)所示, 其中目标信息显著增强, 视觉效果明显改善, 图像对比度显著提升, 细节信息增加.如重建后的目标信息光图像中字母“OEI”清晰可见且边缘细节明显.

图4 水下偏振成像实验结果 (a) 原始强度图像; (b) 偏振共模抑制图像; (c)和(d)分别为文中所述方法分离的背景散射光和目标信息光图像Fig.4.Experimental results: (a) intensity image; (b) PDI image; (c) and (d) estimated backscattering and object information by the proposed method.
图5 为图4(a)-(d)沿直线和虚线标出位置的像素强度统计分布.原始强度图像中像素强度值呈现近似光滑的变化趋势, 其中的目标与背景差异不明显, 难以从中获取目标信息.其强度值由135到245的缓慢变化则直接表明了图像中散射光的非均匀分布.图5(a)代表图4(a)和图4(b)中横向第196行像素强度分布的紫色和绿色曲线表明, 偏振共模抑制明显消除了图像的非均匀性.图5(a)中红色曲线取自图4(d), 其在像素位置200-310之间存在明显起伏, 表明实验中目标信息(字母“O”)得到了有效恢复, 背景散射被有效去除.图5(b)代表图4(a)-(d)纵向第253列像素强度的统计值表明, 偏振共模抑制处理方法能够有效地解决非均匀强背景问题, 提升场景图像低秩性, 从而提升本文方法中背景信息与目标信息的分离效果.红色虚线中的明显起伏表明本文方法有效地抑制了非均匀强散射背景, 目标细节信息得到有效恢复.
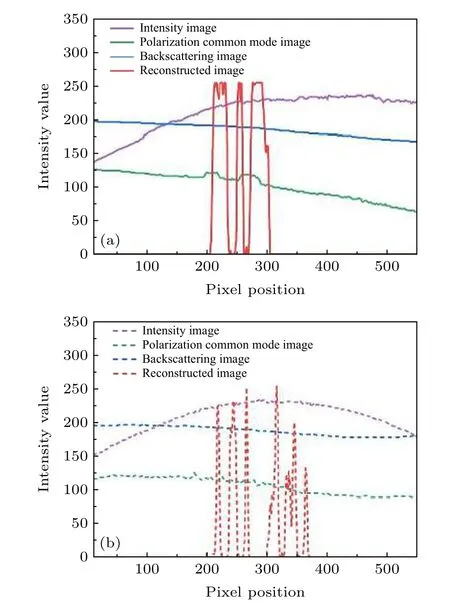
图5 实验结果图像像素强度统计 (a) 图4(a), 图4(b),图4(c)和图4(d)中第196行像素强度分布; (b) 图4(a), 图4(b),图4(c)和图4(d)中第253列像素强度分布Fig.5.Pixel intensity distribution of experimental results:(a) Horizontal line plot of Row 196 from Fig.4(a), 4(b),4(c) and 4(d); (b) the vertical line plot of Column 253 from Fig.4(a), 4(b), 4(c) and 4(d).
为进一步验证文中所述方法的普遍适用性和有效性, 在不同浑浊度水体中开展实验, 结果如图6(a1)-(f1))所示.随着水体浑浊度增加, 成像过程中的散射明显增强, 导致目标信息不同程度淹没于后向散射, 且无论何种条件下, 后向散射均呈现明显不均匀分布.可见, 非均匀强散射背景是水下成像中的常见问题.图6(a2)-(f2)为不同浓度下的重建结果, 由图可见, 虽然水体浑浊度不断增加, 但重建结果中的目标信息整体得到清晰复原,目标物上的细节信息均清晰可辨.这表明本文所述方法具有较强鲁棒性和普遍适应性.

图6 不同浓度溶液中实验结果 (a1)-(f1) 为原始强度图像; (a2)-(f2) 为重建结果Fig.6.Results in solutions at different concentrations:(a1)-(f1) Intensity images; (a2)-(f2) reconstructed images.
为客观分析文中所述成像方法的效果, 采用平均梯度、图像均方根误差(mean squared error,MSE)和图像对比度三种常用的图像质量评价参数对成像结果进行定量评价, 结果如图7所示.从图7可以看出, 经过文中所述方法重建后的图像平均梯度值平均提升4倍左右, 图像标准差提升了1.5倍左右, 反映视觉效果的图像对比度有效提升了10倍左右, 表明本文方法能够大幅度地提升水下成像图像质量.虽然受噪声影响, 图7中质量评价参数曲线随水体浑浊度变化存在小幅度波动.但总体看来, 水下退化图像在经本文所述的基于稀疏低秩特性的水下非均匀光场偏振成像方法重建后,图像质量尤其是图像对比度和细节信息均可显著改善和提升.
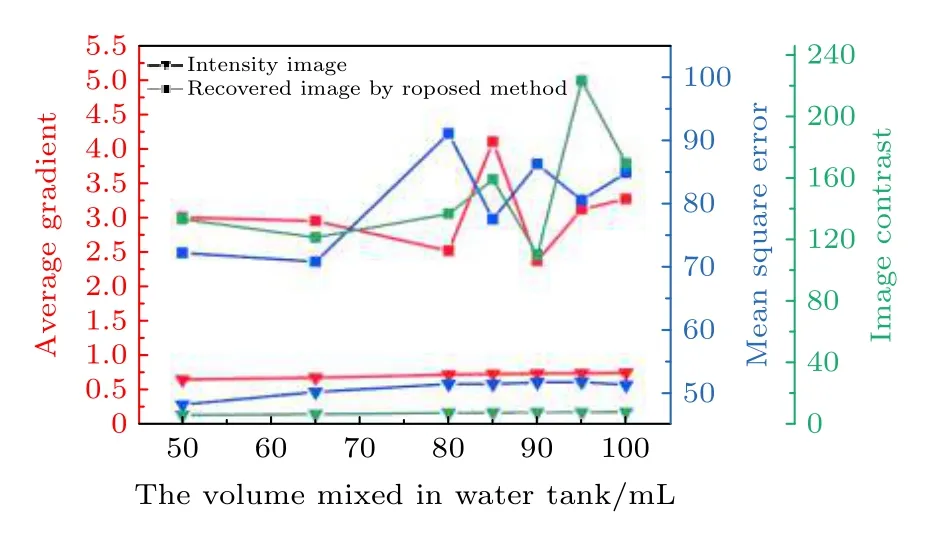
图7 图像质量评价参数的客观评价结果Fig.7.Objective evaluation results of underwater images.
5 结 论
散射光场中非均匀分布的强散射背景信息一直是水下成像技术中难以解决的问题, 本文从散射光场偏振特性出发, 深度挖掘利用偏振共模抑制特性, 有效地去除背景散射的非均匀分布, 提升图像的低秩性.此外, 结合水下成像中背景散射光图像纹理单一, 信息的高相关性以及目标信息的小占比性, 利用矩阵的稀疏低秩分解方法在稀疏低秩子空间对复杂水下成像条件下进行背景与目标信息的重建, 大幅度提升水下清晰化成像效果.实验结果表明, 该方法能够有效地分离背景散射光与目标信息光, 提升水下图像的对比度, 获得高对比度、清晰化的水下场景图像, 为高浑浊水体下成像研究提出了新的理论方法.
