基于视场分割的仿生复眼系统设计方法
2021-08-31何博侠
刘 贝,何博侠
(南京理工大学机械工程学院,江苏 南京 210094)
0 引言
大视场成像系统在智能监控[1]、导航定位[2-3]以及国防军事[4-5]等领域具有广阔的应用前景。如智能监控系统需要检测并识别行人和车辆[6];无人驾驶汽车可以通过全景图像来进行导航定位[7];无人机需要大范围内搜寻并跟踪运动[8-9]。目前,传统的大视场成像方法主要有圆柱投影法[10]、鱼眼透镜[11]、旋转拼接法[12]和折反射成像系统[13]等。鱼眼透镜和折反射系统通常采用单一的低分辨率、大畸变的图像传感器,因此,所成图像分辨率低且具有相当大的畸变;旋转拼接成像系统成像耗时长且只能采集静物,具有低效率和实时性差的缺点。
昆虫复眼因其结构紧凑、视场大和高分辨率等优点被广泛关注,目前复眼系统主要有基于微透镜阵列[14-15]和基于相机阵列2种形式。传统微透镜复眼由于微透镜结构的特殊性存在着加工困难、分辨率低的缺点,不具有工业实用性。随着相机的高分辨率、宽动态和集成化发展,采用相机阵列实现复眼成为一种更加可行的选择。传统多相机仿生复眼设计中常将相机视角简化为圆形,需要对相机原始视场进行切割,无疑会降低相机利用效率。因此,本文提出一种直接采用相机原始矩形视场进行视场分割的设计方法,首先分析单个“子眼”相机视场与总视场的关系,然后利用矩形视场水平、垂直方向的视场角对预定半球视场进行纬度层和经度层的分割,确定各相机在半球体上的位置和方向。这种设计方法大大提高了相机的利用率且降低了系统的复杂度,为后续全景图像拼接提供了便利。
1 基于视场分割的复眼系统设计理论
设计的多相机曲面仿生复眼如图1所示。该系统由1个半径为R的半球和位于球面上的若干个完全相同的相机组成。球壳起支撑作用,每个相机负责特定的视场空间,且所有相机的光轴均经过球壳的球心。由于相机排布在半球体上,所以可以通过建立球坐标系来确定相机的位置。如图2所示,空间中任一点P的坐标均可表示为(R,φ,θ),其中R为球壳的半径,φ为向量OP与Z轴正方向所成的夹角,称为仰角,θ为向量OP在XY平面的投影与X轴正方向所成夹角,称为方位角。

图1 仿生复眼系统
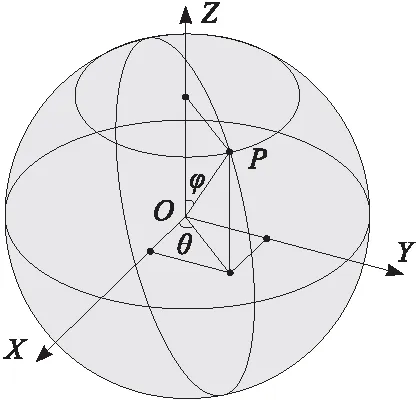
图2 球坐标系
球坐标系(R,φ,θ)与直角坐标系(x,y,z)的转换关系为
(1)
本文采用单个相机的物平面来进行预定视场分割,因此,首先需要对单个相机的物平面进行分析。如图3所示,可以用一个假想的四棱锥来表示相机的视场,且像平面一定与该四棱锥底面平行,若存在一个经过光轴且与相机像平面平行的物平面,则此物平面也一定为矩形。

图3 像平面与物平面的关系
此矩形的长L和宽W与物距D的关系为
(2)
在复眼系统中各相机的光心与球心并不重合,因此,在视场分割时必须将其水平视角与垂直视角进行等效转换。如图4所示,在成像距离为D,物平面长宽分别为L、W时,记相机等效水平视场角为α′、等效垂直视场角为β′,可得

图4 相机等效视场角示意
(3)
1.1 相机分层规则
以单个“子眼”相机的物平面代替相机的视场范围,并以此为基本单位,对预定视场进行无缝分割,主要有以下2个步骤:
a.根据求得的等效垂直视场角β′,从纬度方向将预定视场ψ=π划分为若干层,如图5所示,则可将虚拟视场垂直分割为N层,即

图5 纬度划分示意
(4)
ceil表示向上取整;+0.5表示当各层视场重叠部分较少时增加1层相机,从而达到增加各层视场重叠部分的效果。层数N由上至下,逐层增加。复眼的第1层只需要1个相机,且位于同一层的所有相机的坐标值φ相同,因此,第n(1≤n≤N)层所有相机的φ坐标值为
(5)
b.当每层相机的φ坐标值确定后,进而确定各个相机的θ坐标值,即可确定各个相机的位置。由于相机在每个纬度层上均匀分布,因此,第n纬度层相机的个数为
(6)

(7)
因此,第n层上的第m个相机的θ坐标值为
(8)
εn为同一层相邻2个相机之间的θ坐标差值,即
(9)
通过上述步骤,即可确定实现对预定视场无缝分割需要的相机总数M,以及“子眼”相机的安装位置和角度。
(10)
1.2 有效视场分析
根据上述设计规则,除了最顶层和最底层以外的任意纬度层的实际成像情况如图6所示。其中,某个相机的实际成像范围可看作1个等腰梯形。因为相机在同一纬度层上是均匀排布的,所以各相机的实际成像范围是相等的,即所有等腰梯形都是相等的。定义实际成像梯形的高为hn,上底为tn,下底为bn,计算公式为
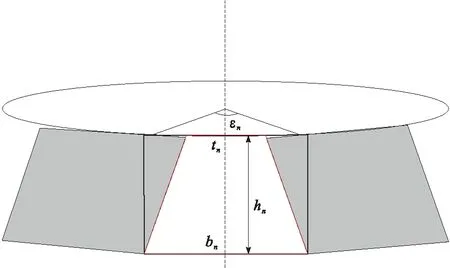
图6 第n纬度层实际成像视场示意
(11)
则该纬度层物平面的有效面积Sn为
(12)
对于最顶层而言,它只包含1个相机,只有1个物平面,且该物平面在实际成像时与第2层的相机部分重叠,且与每个相机重叠的区域相等,则第1纬度层的实际成像物平面可等效为1个正多边形,其边数与第2层相机的个数M2相同,边长等于第2层有效梯形区域的上底t2,故第1纬度层物平面的有效面积S1为
(13)
对于最下方的第N纬度层,不同于其他层的是,其中某一相机的有效成像物平面不与下一层相机重叠,则其实际成像物平面范围可等效为1个等腰梯形外加1个矩形。其中梯形区域与上述纬度层相同;矩形区域的长等于等腰梯形的下底bn,矩形的宽为wn=hn。则第N纬度层的有效视场区域SN为
(14)
仿生复眼系统整体的有效视场区域S等于各纬度有效视场面积之和,即
(15)
同时,所有“子眼”相机的实际物平面面积之和S0为
S0=M×L×W
(16)
则可得整体系统的利用率,即有效视场占所有“子眼”相机物平面总面积的比例μ为
(17)
依照上述设计规则,设计一个水平视场为2π,垂直视角为π,球体半径为r,最小全景成像距离为D的复眼系统。通过该系统来研究D/r,以及“子眼”相机水平视角α和垂直视角β对仿生复眼系统总相机数M以及视场有效率μ的影响。
由图7、图8和图9可知,无论D/r为多少,随着“子眼”相机水平视角α和垂直视角β的减少,所需相机总数M增加、视场有效率μ均呈下降趋势。这是因为相机视角减小,对于已定视场需要分为更多层,导致所需相机总数M增加,同时,由于相机数增多,两两相机间又各有重叠区域,使得系统整体重叠区域增加,导致视场有效率μ降低。
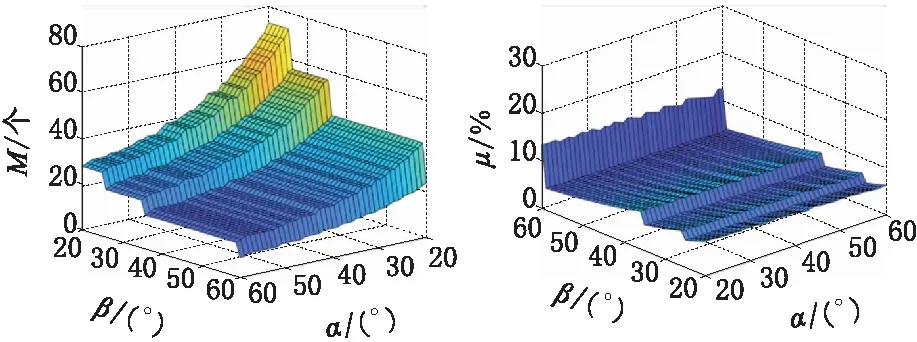
图7 D/r=5时M、μ与α、β的关系
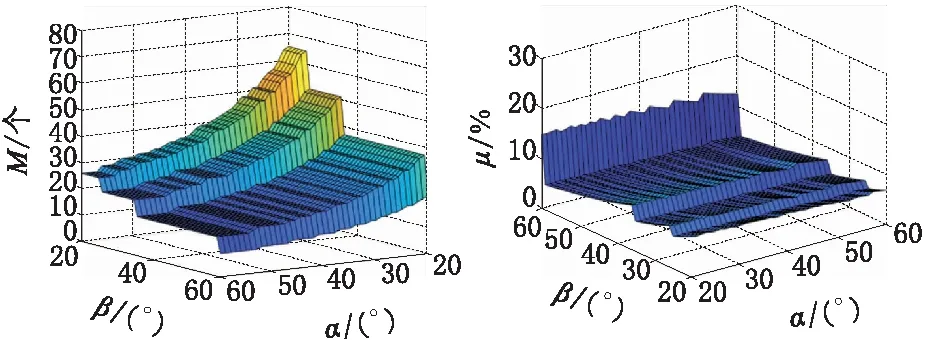
图8 D/r=10时M、μ与α、β的关系

图9 D/r=20时M、μ与α、β的关系
另外,从图中可以看出当D/r增大时,相机总数M随之减小,而视场有效率μ随之增大。通过这一实验结果,可以选择更大视场角的相机和合适的成像距离来提高相机的利用率,以及实现更大视场的仿生复眼系统。
2 系统实现及实验验证
基于上述仿生复眼设计规则,选用HBV-1610型号相机设计仿生复眼系统。其主要技术参数如下:传感器型号为GT2005 COMS,其光学尺寸为1/5 inch,最大有效像素1 616×1 216 ,传感器尺寸为2 849 μm×2 184 μm,单个像素尺寸为1.75 μm×1.75 μm;对角线视场角为60°,焦距为2.7 mm;相机物理尺寸为8.5 mm×8.5 mm×4.6 mm,原件区尺寸为17.2 mm×26.2 mm。
根据实际成像需求选取相机视场角χ≈60°,并根据实际相机尺寸,确定球壳尺寸R=4 cm,最小全景成像距离D=20 cm。经过测量得该相机水平视角α≈47°,垂直视角β≈40°,实际采集的图像分辨率为1 600×1 200像素。根据上述设计规则,可得所需相机总数M=24,将半球壳分为4层,从顶层至上而下各纬度层所需相机个数分别为1、6、8、9。将所有相机按照Cij进行编号,其中i表示第i纬度层,j表示该纬度第j个相机,则所有“子眼”相机的坐标确定如表1所示。

表1 复眼系统中各相机的坐标
为了验证上述设计,制作了2层的仿生复眼系统进行实验。球壳半径R=4 cm,整体体积较小,采用3D打印技术进行制作。
图10为该仿生复眼系统最终实物图,硬件电路的核心为HBV-DSP1610AF,负责图像的采集和传输。图11为该仿生复眼系统采集的全景图像,该图像由7张子眼图像拼接而成,且内部不存在空白,验证了该设计方案的可行性。依照该设计规则制作的复眼初步实现了大视场全景成像。根据理论分析可得,该复眼系统无缝成像视角约为79.5°,成像像素大小为1 200万像素。

图10 仿生复眼实物

图11 复眼系统所成全景图
3 结束语
本文提出了一种基于视场分割的多相机阵列仿生复眼系统设计方法,该方法通过直接采用相机原始矩形视场对预定视场进行分割,避免了传统复眼设计中将相机视场简化为圆形使得相机利用率降低的问题。
该方法首先根据相机的视场角计算与图像传感器靶标平面平行的矩形物平面大小。然后分析了“子眼”视场和总视场的关系,提出了一种基于矩形物平面的视场分割规则,确定了对预定视场进行完整分割所需的相机个数,以及其安装位置和角度。同时还分析了水平视场角、垂直视场角对相机数目和相机利用率的影响。最后根据上述相机排布规则设计了2层的仿生复眼系统,该系统由7个“子眼”相机在球面上按照固定规则排列而成,每个子眼指向不同的视场空间,整体实现了79.5°无缝成像,验证了该设计方法的有效性。
本设计方法采用了分层思想,会导致不同层相机的重叠度不同,导致整体重叠度变大。在今后的研究中,可以提出一种相机排列方式使得所有相机重叠度相同,提高相机利用率,降低系统复杂度,进一步提高复眼系统的实用性。
