基于神经网络的五相开关磁阻电机直接转矩控制系统研究
2021-08-31胡春龙
胡春龙
(陕西国防工业职业技术学院,陕西 西安 710300)
0 引言
开关磁阻电机(SRM)与其他电机相比较,最大的特点在于结构上的双凸极形式,结构的简单导致控制上经常会出现不稳定。从工作原理上分析,开关磁阻电机与步进电动机的运行原理有一定的相似性,但实际工作过程又不同于步进电机,它是特种电机的一类,归属为磁阻式电动机。这种磁阻式局限了它的运行场合,这也是大多数交直流电动机与其不同之处所在。开关磁阻电机主要应用在一些要求较特殊的场合,如煤矿开采、油田开发等领域。这种特殊的应用程度是其他电机无法替换的,所以开展开关磁阻电机的控制研究有一定的现实意义[1]。
文中以五相开关磁阻电机为研究对象,利用其多相数、小步距角等特点从结构上减小了电机运行过程产生的转矩脉动。采用直接转矩控制方法,通过对转矩的直接控制,得到定子磁链在不同空间区域的电压矢量,建立了电机直接转矩控制所需的开关表。以速度为外环,磁链和转矩为内环,实现了开关磁阻电机三闭环调速控制,从控制方法上解决了转矩与转速的波动问题。在控制算法上引入了PID与BP神经网络PID(BP-PID),利用PID对参数的快速整定和神经网络自适应、自学习的特点,减小电机启动过程产生的瞬时大电流,优化了磁场波动,提高了系统稳定性,缩短了转速响应时间。
1 五相开关磁阻电机直接转矩控制
1.1 磁链与转矩的变化特性
五相开关磁阻电机各相绕组结构与工作方式相同,且每相绕组均独立工作,根据电路基本定则,回路中的各相绕组电压方程可表示为
(1)
U为定子相电压;R为定子相电阻;i为定子相电流;ψ(θ,i)为定子相磁链;θ为转子位置角。
由式(1)可得定子磁链的微分为
dψ(θ,i)=(U-Ri)dt
(2)
一般情况下,定子中的绕组电阻都比较小,可忽略,且在较短时间时式(2)可近似表示为
Δψ(θ,i)≈UΔt
(3)
由式(3)可得出,在定子绕组施加的电压和电压作用的时间直接影响着定子绕组磁链的变化。电压作用的矢量方向和磁链变化的矢量方向是一致的,从空间上看,定子磁链的指向是沿着电压空间矢量的方向变化的,如图1所示。

图1 磁链变化矢量
要想得到五相开关磁阻电机的合成磁链,就要用到坐标变换让五相定子磁链投影到两相静止的直角坐标系α-β中,如图2所示为定子磁链5-2坐标变换矢量图。
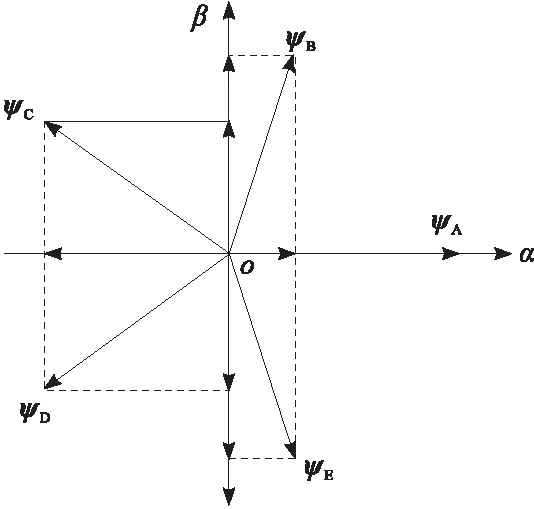
图2 定子磁链变换矢量图
由图2可以计算出α-β坐标系下的磁链为:
ψα=ψA+ψBcos72°+ψEcos72°-
ψCcos36°-ψDcos36°
(4)
ψβ=ψBcos18°+ψCcos54°-ψDcos54°-ψEcos18°
(5)
(6)
ψA~ψE为五相定子各相磁链矢量;ψs为五相合成定子磁链矢量。
由以上分析可知,通过选择合适的电压空间矢量可以使控制磁链基本不变,但直接转矩控制的核心是控制转矩,那么就要分析转矩的变化规律受哪些参数影响。下面从转矩公式出发,分析转矩的影响量。
2.坚持统筹兼顾,处理好量化评价“四个关系”。一是“硬件”与“软件”的关系。职称评审中,学历资历是硬杠杠,评价内容具体客观、操作性强,一般掌握得比较严格。相比之下,能力业绩是软指标,准确评价有一定的难度,且操作弹性较大,导致评价容易出现“两硬、两软”现象。为使学历资历和业绩能力都硬起来,坚决克服论资排辈、求全责备的思想,坚持职称评审“三看法”,既看学历资历年限,更看工作能力水平;既看成果“本本”,更看业绩贡献;既看缺点和不足,更看优势和潜力,全方位、多角度去衡量评价每一名专业技术人员,形成重业绩、重能力的选拔导向。
式(1)中,若不考虑绕组内阻,则电源输入的有功功率可表示为
(7)
通常情况下,在1个开关周期内,开关磁阻电机的相电流波形变化基本一致,而且常工作在磁饱和状态下,故转子位置角的变化将无法直接影响磁场的储能状况。这样电机的电磁转矩又可以写为
(8)

1.2 电压空间矢量确定与选择
文中所选五相开关磁阻电机功率变换器为不对称半桥式结构,变换器的每一种开关状态分别对应着相绕组不同的电平状态。图3所示为A相绕组在不同开关状态下的3种电压状态,这样每相绕组在同一时刻共有3种电压选择,分别为1、0、-1。图3中虚线标注的箭头方向为绕组电流方向,电压方向规定为左正右负[3]。
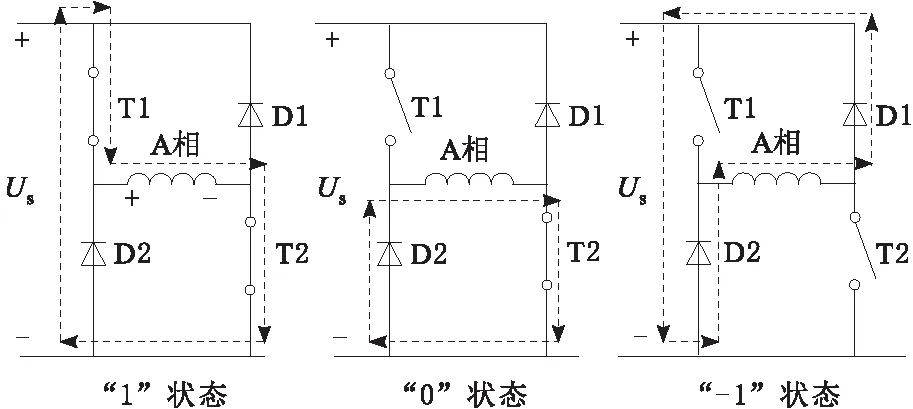
图3 A相绕组电压状态
五相开关磁阻电机的五相绕组对应的5个电压状态就构成了1个有效电压空间矢量,在考虑到功率管开关频率及电机有效运行状态时,应对部分电压空间矢量进行取舍,先构造出5个基矢量,再对基矢量进行取反,最终得到空间对称的10个电压空间矢量。
由前文分析可知,磁链与转矩的变化均可通过选择不同的电压空间矢量施加控制,而磁链与转矩共有4种变化组合,分别为T↓Ψ↓、T↓Ψ↑、T↑Ψ↓、T↑Ψ↑。针对这4种组合,分别选择一组最佳的电压空间矢量,即可让磁链和转矩按要求变化。
设电机定子磁链矢量在某一时刻按照逆时针旋转到了N1区域,则定子磁链沿不同电压空间矢量作用时的变化如图4所示。
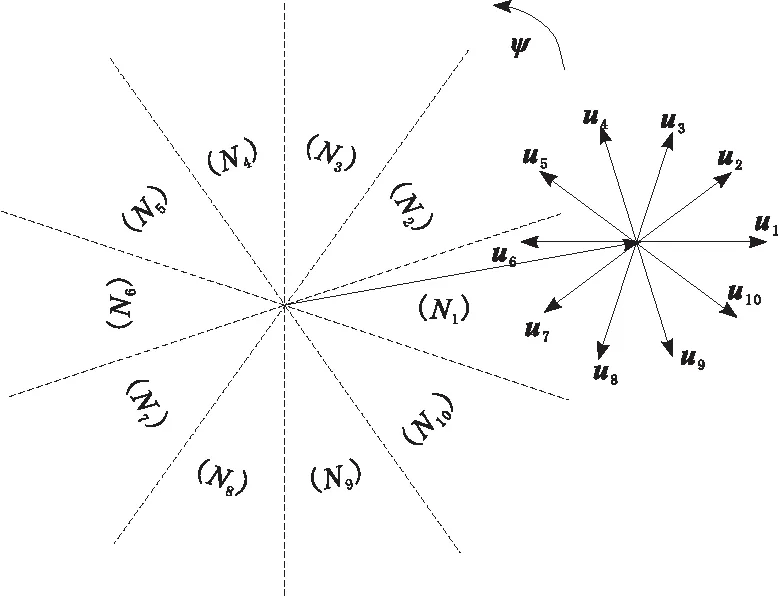
图4 电压矢量作用示意图
由图4结合式(3)、式(8)可知,能使磁链按增大方向作用的电压矢量有u1、u2、u3、u9、u10,能使磁链按减小方向作用的电压矢量有u4、u5、u1、u7、u8,能使转矩按增大方向作用的电压矢量有u2、u3、u4、u5,能使转矩按减小方向作用的电压矢量有u7、u8、u9、u10。而为了减小电机运行过程中的电流冲击,将导致磁链变化过大的一些电压矢量舍去,得到如表1所示的五相开关磁阻电机直接转矩控制开关表。

表1 五相开关磁阻电机直接转矩控制开关表
2 BP-PID与PI复合控制器设计
2.1 BP-PID控制系统
用于PID控制系统的BP神经网络一般采用如图5所示的网络结构,有n个输入节点,r个隐层节点,3个输出节点。输入节点对应所选的系统运行状态量,输出节点分别对应PID控制器的3个可调参数KP、KI、KD。由于KP、KI、KD不能为负值,所以输出层神经元的转换函数取非负的S型函数,而隐含层神经元的转换函数可取正负对称的S型函数[4]。

图5 BP神经网络结构
一般选取的网络性能指标函数为
(9)
性能指标函数J决定了全局的惯性项数值,为了使其快速达到最小,J应按照一定规则连续进行调整与搜索,从而对权值不断修正,最终输出参数可调的PID值[5]。
2.2 BP-PID与PI复合控制器
BP-PID控制系统在改善系统性能方面优势明显,但自学习过程算法较为复杂,收敛速度慢,无法满足开关磁阻电机直接转矩在实时性上的要求。故文中设计了一种BP-PID与PI复合的控制器,如图6所示。
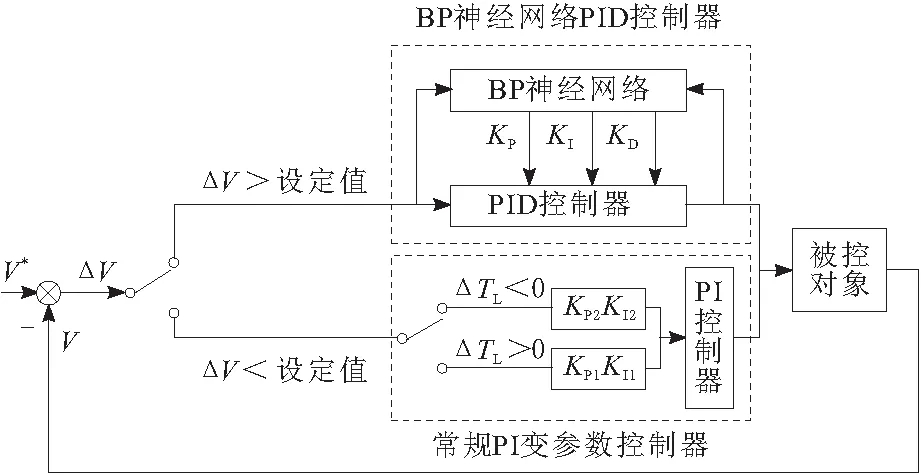
图6 BP-PID与PI复合控制器
在大速度误差下采用BP-PID控制调速,利用BP网络自整定PID参数,消除较大超调提高可靠性。小速度误差下采用算法简单、速度较快的传统PI对系统进行细调,增强系统的稳定性。常规PI参数以负载转矩误差限进行整定,这种方法可使负载与转速变化的同时,实现系统的二次调节,缩小了速度滞环,响应速度和抗扰性能均得到提高[6]。
3 开关磁阻电机控制系统仿真模型
文中选用五相开关磁阻电机功率为30 kW,对其BP-PID与传统PI复合下的直接转矩控制进行了仿真,仿真模型如图7所示。其中,电源电压为直流220 V、转速给定为1 000 r/min、磁链给定为0.37 Wb、BP-PID控制系统学习速率η=0.32、α=0.02,控制器速度切换值为45 r/min。由开关表选择直接转矩控制所需的电压空间矢量,并与五相功率变换器一一对应,实现五相开关磁阻电机直接转矩控制。

图7 开关磁阻电机仿真模型
4 仿真结果与分析
通过对五相开关磁阻电机仿真,得到五相定子磁链变化波形如图8所示。从图8可以看到,定子磁链稳定时波形为正弦波,有利于圆形磁场的形成,能够减小转矩脉动的产生,减小电机损耗。
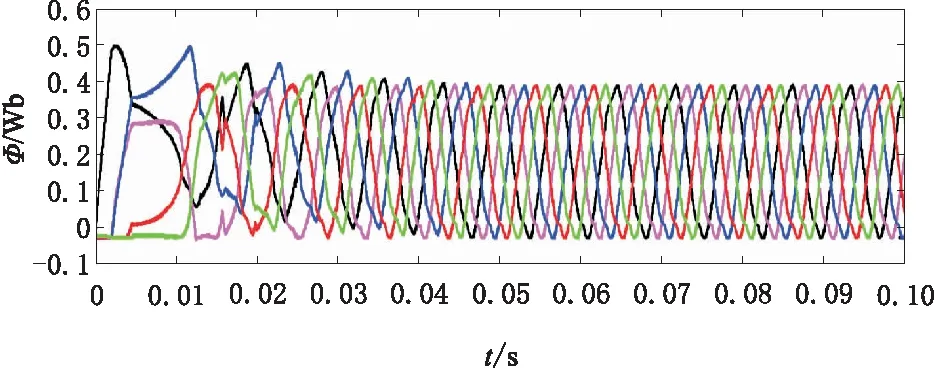
图8 定子各相磁链波形
负载转矩突变时,转矩与转速的变化曲线如图9所示。在运行起初阶段,负载转矩为0,0.05 s时变为20 N·m,0.1 s时恢复至0。
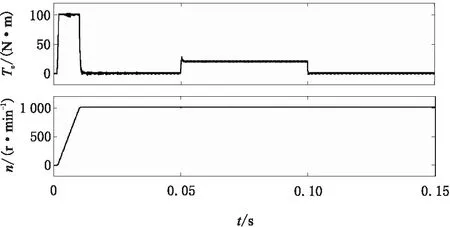
图9 负载突变时转矩、转速曲线
从图9可以看到,转速在负载变化的整个过程中保持平稳,最大转速变化为3 r/min。转矩能快速响应负载的变化,转矩脉动最大不超过1.5%,起动转矩为100 N·m,起动转矩大,调节时间短。
负载发生变化时,PI变参数与PI定参数下的转速曲线局部展开对比如图10所示。
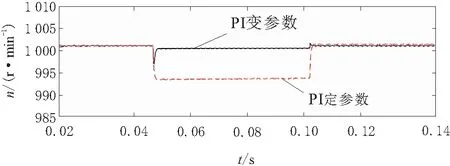
图10 PI变参数与PI定参数下的转速曲线
从图10可以看到,当负载增大时,PI变参数下的转速能快速恢复至给定值,PI定参数下的转速衰减较大,转速衰减约为7 r/min。当负载恢复至0时,PI变参数下的转速误差略小于PI定参数。
BP-PID复合调节器与传统PI调节器下的转速曲线局部展开对比如图11所示。

图11 BP-PID复合调节器与PI调节器下的转速曲线
从图11可以看到,负载变化前后,BP-PID与PI复合调节器下的转速较为平稳,基本保持在给定值不变,传统PI调节器下的转速误差较大,最大转速误差为5 r/min。
5 结束语
五相开关磁阻电机相数的增加从结构上可以降低转矩脉动,但控制难度远大于其他低相数电机。采用直接转矩控制,以控制转矩为核心构造转矩和磁链变化所需的电压空间矢量,得到五相开关磁阻电机直接转矩控制开关表。结合BP神经网络PID与传统PI两者的优点,以转速误差限为切换点,同时加入PI变参数,大大增强了系统的稳定性、可靠性和快速性,改善了系统的动静态性能,为更高相开关磁阻电机的研究与控制提供了重要参考。
