车联网中基于BP神经网络的智能协同频谱感知算法*
2021-08-30张月霞赵义飞
张月霞,赵义飞
(北京信息科技大学 a.信息与通信工程学院;b.现代测控技术教育部重点实验室,北京 100101)
0 引 言
近年来,随着5G通信和智能交通的不断发展,车联网(Internet of Vehicles,IoV)环境下新用户数量激增以及车流密度增大,导致频谱资源紧张而无法满足用户需求。频谱感知技术可以有效提高无线频谱的资源利用率,可以充分缓解无线频谱资源短缺的问题。在频谱感知技术中,授权使用频段的用户为主用户(Primary User,PU),次用户(Second User,SU)可以通过频谱感知技术来判断主用户是否占用频段。若判断主用户未占用频段,次用户则可以接入网络占用该频段进行数据传输,以提高频谱利用率。传统的频谱感知方法多为单用户频谱感知,多用在移动速度较慢、通信环境变化较小的场景中,此类环境中噪声干扰较小,检测结果可大致满足要求。但在IoV环境中,随着车辆高速移动、通信环境快速变化,无线信号容易受到噪声、阴影衰落、多径效应等因素影响,使得单用户检测结果不够准确,导致频谱感知失败。因此,在IoV中研究多用户协同频谱感知,以提高感知性能具有重要意义。
目前,关于IoV环境中频谱感知技术的研究大致分为以下三类:第一类是在传统协作频谱感知方法上进行判决权重或者门限的优化研究[1-3];第二类是在传统协作频谱感知方法上引入机器学习进行算法优化的研究[4-5];第三类是在传统协作频谱感知方法上基于车辆位置和相关性的特点,对本地数据作进一步挖掘、融合的研究[6-7]。当前文献在进行协作频谱感知方法优化的过程中,并未真正考虑复杂环境中噪声等干扰的影响,导致检测结果的准确率较低,影响频谱感知整体性能。
反向传播神经网络(Back Propagation Neural Network,BPNN)具有较强的自主学习能力,同时抗噪声干扰能力较强,在复杂环境中的适应能力更强,鲁棒性较好,优于其他机器学习算法,更符合车联网的变化随机性[8]。因此,本文提出了一种基于BP神经网络的协同频谱感知算法,通过将本地各次用户感知结果进行协方差处理,结合BP神经网络对次用户信噪比进行权值优化以得到最优的频谱感知网络模型,最后使用训练好的模型进行协同频谱感知,进一步降低噪声等干扰的影响,提高检测准确性。
1 系统模型
如图1所示,假设车联网环境下存在1个授权频段主用户PU,M个次用户SU,1个数据中心(Data Center,DC)。PU随机出现,具有频段使用的优先权;SU只可通过频谱感知方法以确定主用户是否占用频段,从而决定是否使用该频段进行数据传输;在频谱感知过程中,每个SU可以接收到来自其他SU的数据信息;DC则负责接收、处理SU的本地检测结果[8]。

图1 IoV场景下协同频谱感知模型
次用户频谱感知是对主用户是否使用频谱进行判断,判断方法具体如下:
(1)
式中:k为时间节点,k=1,2,…,L;x(k)为主用户在k时间点发射的信号;y(k)为次用户在k时间点接收到的信号;n(k)为在k时间点的加性高斯白噪声(Additive White Gaussian Noise,AWGN);h(k)为主用户与次用户之间在k时间点的信道增益;H0表示主用户未占用频谱的状态;H1表示主用户占用频谱的状态[9]。
M个次用户在第k个时间点接收到的采样数据序列如公式(2)所示:
Y(k)=[y1(k),y2(k),…,yM(k)]T。
(2)
M个次用户接收到的信号矩阵如公式(3)所示:
(3)
式中:N为采样时间点数。
对信号矩阵Y进行一定的数据处理,通过估计提取信号数据的特征值,从而得到相应的采样协方差矩阵为
(4)
当次用户数为M时,矩阵大小为N×N。
M个次用户的本地检测结果为
(5)
如公式 (6)所示,如果主用户PU处于H0状态时,次用户本地检测结果低于门限值λ;如果主用户PU处于H1状态时,该检测结果高于门限值λ[10]。
(6)
在IoV中,频谱感知研究广泛采用AWGN信道,根据能量检测理论可近似估计Y1服从卡方分布,如公式(7)所示:
(7)

由此可得,本地检测概率Pd如公式(8)所示,即为当主用户占用频段时系统可检测到的概率。
(8)
式中:Qu是Marcum Q函数。
虚警概率Pf如公式(9)所示,即为当主用户并未占用频段时系统却错误判定其占用频段的概率。
(9)

2 BP-CSS算法
本文研究IoV场景下基于BP神经网络的协同频谱感知(BP-Cooperative Spectrum Sensing,BP-CSS)算法,算法流程主要由本地数据预处理和频谱感知训练两部分构成,如图2所示。本算法选择协方差矩阵进行数据预处理,是为了便于更好地提取数据的特征值。协方差矩阵中涉及矩阵运算,根据FPGA、DSP等硬件实现原理,复杂度为加法运算,具体为 (h2+n2)×N,其中h为主用户与次用户之间的信道增益,n为加性高斯白噪声,N为采样时间点数。本算法通过数据预处理阶段的复杂度以换取频谱感知训练阶段的感知效率和准确率提高,从而促使整个频谱感知的性能提升。

图2 BP-CSS算法感知流程
2.1 本地数据预处理
在IoV环境中,M个次用户接收到的本地数据信号通过正交解调和采样得到I、Q两路信号,然后构成算法中的原始数据,如公式(10)所示:
yi(n)=Ii(n)+ηQi(n) 。
(10)
式中:Ii(n)和Qi(n)分别表示第i个次用户接收到的I路信号和Q路信号,n为时间节点集合,n={1,2,…,N}。将M个次用户在N个时间点的采样数据序列进行处理,形成信号矩阵,再对其进行实部和虚部的划分,并分别组成两个矩阵YI、YQ,如公式(11)、(12)所示:
(11)
(12)
根据公式(4),由YI可以得到实部的采样协方差矩阵RI为
由YQ可以得到虚部的采样协方差矩阵RQ为
采样协方差矩阵R(N)如公式(13)所示:

RI+RQ。
(13)
因此,RI、RQ即为本算法频谱感知模型的输入。
2.2 频谱感知训练
在协同频谱感知中,每个次用户可以接收到来自其他次用户的信噪比信息。在实际IoV环境中,此类信号易受噪声、阴影衰落等影响导致次用户接收到的信号能量值降低,如果主用户存在而能量值低于门限值的时候,则可能发生误判。因此,本文通过将网络中的信噪比权重非静态分配给不同次用户,即是对不同次用户动态分配相应的判决门限,这样可使得信噪比较小的用户的判决门限较高,从而降低整体感知的误判率。
本文采用信噪比网络加权来构建BP神经网络,将采样协方差矩阵的实部RI和虚部RQ作为输入,通过模型训练来提取数据特征,最终利用所提取的特征进行频谱感知。
第i个次用户的信噪比网络权重为
(14)

第i个次用户的判决门限为
(15)
根据公式(8)、(9),第i个次用户的本地检测概率Pd,i和虚警概率Pf,i分别如公式(16)、(17)所示:
(16)
(17)
BP神经网络的整体结构包括带有S个神经元的输入层、带有Q个神经元的隐含层以及带有P个神经元的输出层,如图3所示。

图3 BP神经网络训练过程
隐含层的输入为
(18)
式中:ωs,i为输入层神经元与隐含层神经元之间的连接权值,xs为输入层第s个节点的输出。
隐含层的输出为
fs=f(classs),s=1,2,…,S。
(19)
式中:f(·)为激励函数。
输出层的输入为
(20)
式中:ωi,p为隐含层神经元与输出层神经元之间的连接权值。
输出层的输出为
fp=f(classp),p=1,2,…,P。
(21)
3 实验分析
本文基于Matlab平台,模拟实际噪声干扰较大的道路场景,对多用户协同频谱感知下的传输数据进行一系列系统仿真。本文选用AWGN信道,给定虚警概率Pf=0.1,仿真自变量设置为0~25 dB信噪比以及不同的车辆结点[12]。具体仿真参数如表1所示。

表1 仿真参数表
在IoV环境下,给定范围内车辆数N=10,三种频谱感知算法在不同信噪比条件下的检测概率变化关系如图4所示。从图中可以看到三种算法的检测概率都随着信噪比的增大而增加,其中,在0~5 dB的范围内,基于门限值和基于信噪比加权算法的检测概率较高,这是因为在较为理想的环境下,周围干扰较小,传统方法仍然具有一定的优势;但在5~25 dB的范围内,本算法的检测概率较高,接近于1并且趋于稳定,收敛性较好。本算法的平均检测概率可达90%,比基于信噪比加权频谱感知算法提升20%,比基于门限值频谱感知算法提升30%,充分证明了算法的有效性。其原因是引入了BP神经网络,优化了权值设置,在相同虚警概率的前提下,可以有效避免漏检情况的发生,提高了整体检测的准确度,使其更接近真实值,从而提升了感知性能[13]。
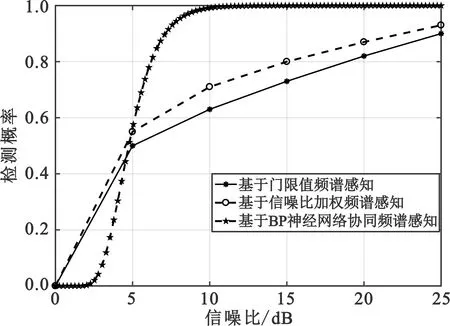
图4 三种算法的频谱感知性能对比关系(N=10)
在低信噪比的IoV环境下,给定范围内车辆数N=10,设置较大的环境噪声,将本文所提BP-CSS算法与其他两种最新的频谱感知算法进行比较所得到的检测概率变化关系如图5所示。从图中可以看到三种算法的检测概率在低信噪比的环境中都随着信噪比的增大而增加,而本文所提算法的检测概率明显高于其他两种算法的检测概率,感知性能更好,说明本文所提算法的鲁棒性更强。基于车辆位置和相关性频谱感知算法和基于双门限能量检测频谱感知算法在低信噪比环境中受噪声影响较大,所以在0~2 dB的范围内两者的检测概率近乎为零;本文所提算法因为引入BP神经网络,抗噪声干扰能力较强,曲线增长更加快速明显,检测性能显著提高。

图5 三种算法在低信噪比环境中的频谱感知性能对比关系(N=10)
在IoV环境下,本文所提BP-CSS算法与其他两种最新算法在频谱感知过程中检测时间随车辆数量的变化关系如图6所示。从图中可以看到三种算法的检测时间在车联网环境中都随着车辆数的增大而增加,在0~5 dB的范围内三种算法的检测时间近乎一致;但在高于5~25 dB的范围内,BP-CSS算法的检测时间明显低于其他两种算法的检测时间,检测效率更高,感知性能优于对比算法。基于车辆位置和相关性频谱感知算法和基于双门限能量检测频谱感知算法的检测时间曲线随着车辆数的增加而迅速增加,这是因为在车联网环境中车辆数的增加会导致车辆之间的数据传输更加复杂,车辆之间会存在一定的同频干扰,再加上环境中存在较大的噪声影响,使得检测时间进一步增加。本文所提算法由于采用协方差矩阵提取特征值,有效降低了本地车辆的数据传输干扰,再通过引入BP神经网络进行优化训练,降低了协同频谱感知的能耗,检测时间有效减少,检测性能显著提高。

图6 三种算法在车联网环境中受车辆数量影响的频谱感知时间对比关系
在实际噪声干扰较大的IoV环境下,基于本算法对道路范围内不同车辆数(N=10,30,50)在不同信噪比条件下的检测概率变化关系如图7所示。从图中可以发现,在车辆数保持一定的情况下,本文算法检测概率的峰值会随着信噪比的增大而降低。这是因为信噪比的增大会使得车辆之间干扰增加,从而降低检测概率。在低信噪比的情况下,检测概率峰值的出现频率随着车辆数的增加而增加,具体表现为在0~15 dB的范围内,当N=50时检测概率峰值的出现频率最高。这是因为在低信噪比的情况下车辆之间干扰较小,随着车辆数的增加,可用于频谱感知的协作用户增加,则可以更高效地提升检测概率。在高信噪比的在情况下,检测概率的峰值随着车辆数的增加而降低,具体表现为在15~25 dB的范围内,当N=10时检测概率的峰值最高。这是因为随着信噪比增大,车辆数增多会导致协作用户在进行频谱感知时的干扰增大,使得检测概率降低[14]。

图7 本算法的检测概率(≥50%)受车辆数影响曲线
4 结 论
本文在研究频谱感知技术的基础上,引入机器学习理论,提出了一种深化的基于BP神经网络的协同频谱感知(BP-CSS)算法。将次用户接收信息通过协方差矩阵进行数据处理,再通过BP神经网络的自主学习能力、权值动态优化设置来进行协同频谱感知,使得具有不同信噪比的次用户在数据中心判决时的权值达到最优,进而提升整体的感知性能。仿真结果表明,本文所提算法受噪声影响较小,检测准确率更高,优于传统的信噪比加权的协作频谱感知算法;同时发现频谱感知的准确率受车流密度影响,随着车流密度的增大,干扰加强,感知准确率会随之降低。
