基于以太网的列车清洗机远程监控系统设计
2021-08-30刘丽华易毅坚何冠平
刘丽华,易毅坚 ,何冠平
(1.广州铁路职业技术学院 机车车辆学院,广东 广州 510430;2.广州地下铁道总公司,广东 广州 510308)
地铁车辆段均配置有列车清洗机,用来清洗车辆表面的灰尘、油污和其他污渍[1]。列车清洗机电气主控制室和污水处理电气控制室分开布置,清洗作业时需要安排1名检修人员在电气主控制室现场值守操作,以确保洗车作业安全进行。这种清洗方式目前存在两方面的问题,一方面,检修人员在电气主控制室无法直接监控到污水处理电气控制柜的运行情况;另一方面,据统计分析,洗车作业耗时较长,洗车作业需要人工辅助完成的时间只占洗车作业总时长的1/8,即在洗车现场监控洗车过程耗费了大量的等待时间,人工有效工时利用率非常低。而当前列车清洗机在技术上己具备了自动清洗功能,自动清洗机故障率低,不需要人员在现场值守。所以构建一套远程监控系统,对列车清洗机进行远程实时监控,实现列车清洗作业无人化自动作业和提高生产效率是亟待解决的问题。
病鱼全长2.5~4.2cm,在烧杯水中游动呆滞,部分鱼头上尾下,体色光泽暗淡不鲜明,头吻部灰白色,呈“白头白嘴”状。解剖濒临死亡的加州鲈鱼苗,鳃丝暗红色、黏液偏多,部分鳃丝已破坏,尾鳍呈灰白色,胃内少量或无食物,胆汁量少色浅,其他内脏未见病灶。用玻片刮取加州鲈鱼苗体表黏液放置在10×40倍显微镜下观察,有节律地顺序摆动的杯体状虫体,一个视野下可见4个以上虫体,多的达10个以上。取鳃丝用玻片压片10×40倍显微镜观察,一个视野下可见5个以上虫体,初步确诊为杯体虫引起的加州鲈鱼苗死亡。
随着工业自动化的发展,工业以太网可以将自动化系统连接到企业内部互联网、外部互联网和因特网,实现远程数据交换以及管理网络和控制网络的数据共享。S7-300/400型PLC的各级CPU和新一代变频器都集成了以太网接口[2],本文在列车清洗机采用S7-300型PLC的基础上,利用CP343-1型工业以太网通信模块,通过工业以太网和PROFIBUS-DP网络,设计了一套列车清洗机远程监控系统,将分布的污水处理站点、电气主控制室和车辆段控制中心进行信息通信,远程监控列车清洗机的运行状态。
1 自动化通信网络概述
一般工厂自动化通信网络采用3级网络结构:现场设备层、车间监控层和工厂管理层[3]。现场设备层连接现场设备(包括分布式输入/输出设备、传感器、执行机构等),完成信息智能采集,现场设备层的核心技术涉及PROFIBUS-DP现场总线技术和无线网络技术。车间监控层用来完成车间主要生产设备之间的连接,车间监控用工业以太网将PLC、PC和HMI连接在一起。车间管理网通过交换机或路由器连接到主网,将车间数据集成到工厂管理层。
网络信息传输可通过工业以太网、互联网、电信网等实现,工业以太网技术具有设备廉价、可与IP技术无缝融合及协议简单、设备兼容性好等优点。可采用双绞线、无线方式和光纤等接入工业以太网,实现现场设备底层传感器网络的接入。双绞线最长传输距离为100 m;无线方式基于3G/4G无线技术,如果采用企业无线网,则要充分考虑到安全性;光纤通过光纤收发器来传输,可以分成单模和多模光纤收发器,单模光纤收发器传输距离为20~120 km,光纤传输具有传送距离远和速度快的优点[4],考虑到本设计的远程监控系统设置在车辆段控制中心,位置固定且离列车清洗机现场约有800 m,结合安全性和效率等综合考虑,本项目本地控制端与远程控制端采用光纤进行以太网通信。
“综合材料艺术”的概念,最为直接的理解就是视觉艺术中混合运用多种材料进行艺术创作。综合材料的英文名称是Mixed media & material,又可以称为复合材料或综合媒介,强调材料多元、复合、兼容的特点。综合材料不一定是现成品,可以是制作作品的特殊材料。综合材料的“综合”二字,还有一个针对性,就是指不只是用单一、惯用的艺术材料,比如蛋清颜料、油质颜料或水墨等等,而是自由采用那些在既往艺术创作中不用或较少使用的多种生活材料、工业材料。综合材料在更多的时候体现为艺术创作的新的形式语言,而语言的变化往往使得
2 远程监控系统结构
列车清洗机工作区域主要包括清洗区、机械间和电控室[5]。清洗区由信号灯、气水管道系统、污水收集系统和各工位组成;机械间包括水泵、水箱、污水处理水池等;电控室分别布置在1楼和2楼,1楼设置污水处理站的设施和控制柜,2楼放置清洗机主电气柜和主控制柜。列车在清洗区按行车信号灯完成洗刷预冷、预湿、侧面初刷、侧面次刷、初冲洗、侧面精刷洗和终冲洗等过程。
思雨终于听到了卧室传出的姐妹俩的笑声,思雨的心里一块石头总算落了地。就好像一宗陈年冤案终于昭雪以告天下。
远程控制端也为车间监控层,设置了1台触摸屏作为终端监控显示屏、1台PC机作为视频监控,通过触摸屏与操作人员进行交互。

图1 列车清洗机远程监控系统总体硬件结构
本地控制端包括本地电气控制系统和视频监控系统两部分。本地控制端也是现场设备层,本地2楼电气控制系统采用S7-315型清洗机主控制器,1楼采用S7-200型污水处理控制器。1楼污水处理控制器和2楼清洗机主控制器通过PROFIBUS-DP网络连接。视频监控平台选用360°红外夜视智能摄像机和NVR网络硬盘录像机搭建,NVR录像机对各摄像机进行录像,无线摄像机也通过Wi-Fi连接到本地端交换机。在本地端S7-300型控制器导轨上安装CP 343-1型通信扩展模块。
服务端和工业以太网硬件设备有交换机、光纤收发器和光纤电缆。从本地控制端到远程控制端铺设光纤电缆线。信息传输路径为:PLC采集信号、电缆线传输给以太网交换机,通过以太网线传输给本地控制端的光纤收发器,再转成光信号,光纤电缆把光信号传输给远程控制端的光纤收发器,光纤收发器转成电信号,通过以太网线传输给远程控制端以太网交换机。
粉丝文化研究中有两个偏向,一是将粉丝视为病态、疯狂、非理性的人群,二是沿袭着“积极受众”立场以及詹金斯的文本盗猎观,着重呈现粉丝的主动性和创造性,以及所带来的正面意义。近几年的研究也似乎更为集中于后者,旨在破除对粉丝固有的刻板印象。粉丝群体通过日常讨论和其他仪式活动维系情感,并形成强大的凝聚力和高度的行动同质性(潘曙雅,张煜祺,2014);粉丝群体具有结构清晰、分工明确的特点(马志浩,林仲轩,2018);粉丝社群内部易形成礼物经济、混杂经济和非正式经济(杨玲,2015);网络粉丝社群具有强大的社会动员能力(朱丽丽,2016)。
列车清洗机远程监控系统的主要任务是采集现场信息、PLC实时数据,并根据作业情况发出控制指令,实现对清洗过程的远程监控。为实现传输速度,本设计选用光纤以太网通信,列车清洗机远程监控系统总体硬件结构如图1所示,包括本地控制端、服务端和工业以太网、远程控制端。
监控软件选用TIA Portal软件,它为系统提供了洗车现场流程监控、数据采集、远程控制和报警等功能。根据系统工艺要求,监控界面共由17个画面组成,监控主界面由系统说明、设备选择、手动调试、流程监控、信息显示和污水处理远程控制等选择项组成,如图3所示。在TIA Portal软件中,PLC的DB20数据块的功能是读取HMI数据,修改原OB1主程序,把PLC的数据和HMI软元件关联,达到用HMI软元件控制PLC主程序的目的。
3 远程监控系统硬件设计
3.1 视频监控系统设计
要从列车清洗机现场操作人员无法直接观察的位置以及容易出清洗故障的位置两个方面考虑视频监控系统智能摄像头的安装位置。经现场调查,轨道上的异物、清洗端的毛刺等问题均会引起清洗故障,但PLC却不会报警,所以在列车清洗机现场安装了6个无线摄像机,分别监控两边刷、轨道、污水处理电气控制室和电气主控制室等重要设备。智能摄像机选用TL-IPC40A-4型云台网络摄像机,上位机安装TL-IPC40A-4型安装软件,远程端安装无线路由器,手机能接收到无线路由器的信号时,可用手机下载App,远程端值班员可通过视频远程监控现场,车辆检修人员也不需要守在现场,可通过手机App实时监控现场。
3.2 PLC硬件组态
岛上现有的中海油湛江分公司涠洲终端处理厂、中海油气电北海燃气公司等工业企业不仅与涠洲岛旅游发展定位不相符,而且对海岛风貌、旅游环境、游客安全的影响较大。
列车清洗机主控制器选择了S7-315型PLC。该PLC具有模块式结构,可灵活选择各种模块组成不同的控制系统,可靠性高,能满足恶劣工业条件,同时具有丰富的编程语言和多种调试手段,使得系统调试变得更加方便。
一旦列车清洗机有故障,PLC通过故障判别会把相应的报警信号显示在任何一个操作界面上,提示操作人员故障类型,远程监控人员经过向维修保养人员咨询后,根据故障的严重程度,决定是继续清洗作业还是安排车辆检修人员现场排除故障。
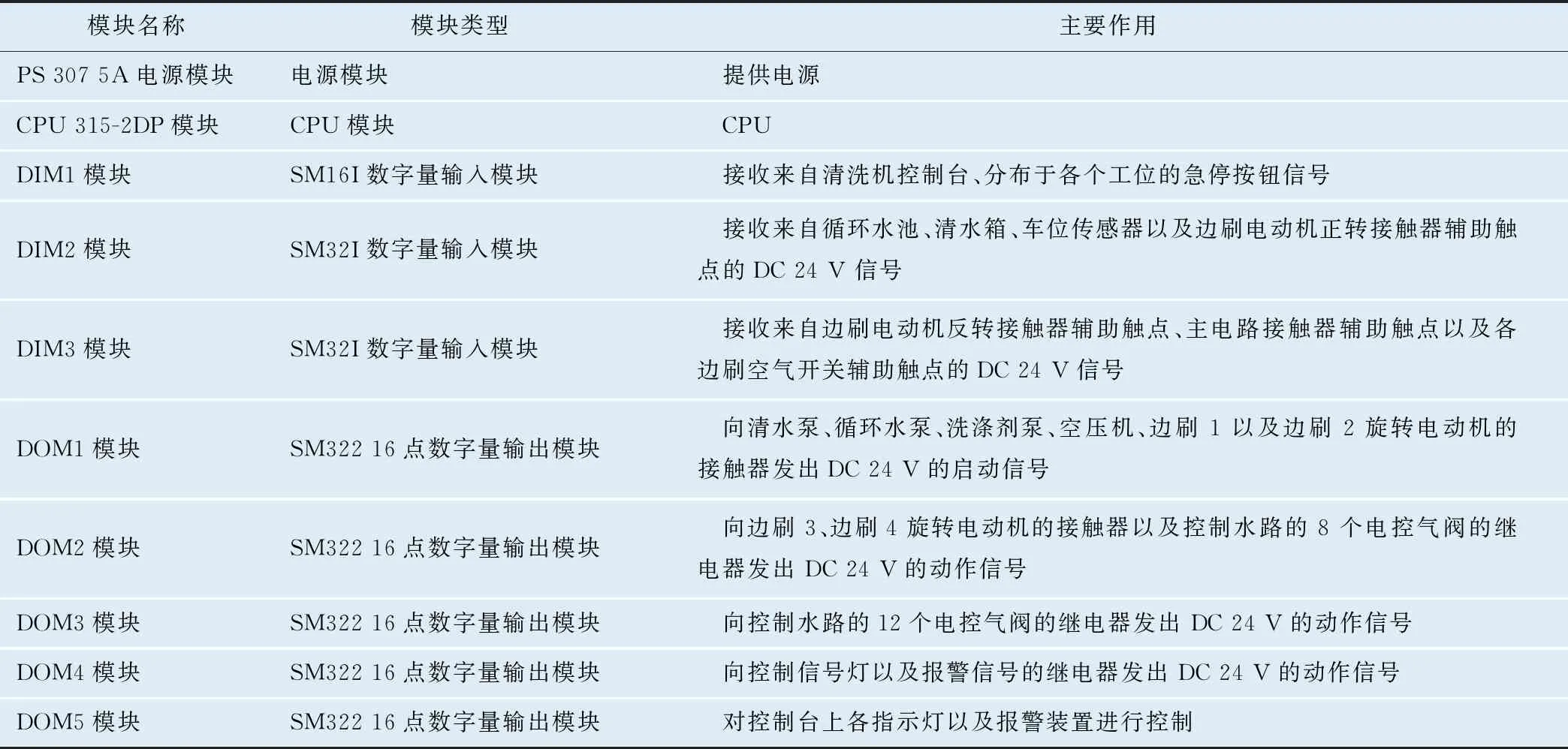
表1 PLC主机硬件组态
3.3 以太网组态
采气厂作为典型的化工企业,安全是摆在企业面前的头等大事,基于安全开展企业生产工作以及经营工作是一项基本原则,在实际业务中,采气厂由于其地理位置分散、风险系数高等特点,对安全管理有着更高的要求。
以太网交换机选用支持1 000 M网络的八口TP-LINK全千兆POE供电交换机,光纤收发器选用SC四芯单模终端盒,光纤电缆线采用GYXTW型室外单模光缆四芯线,沿列车清洗机本地控制室铺设光纤到远程监控端。触摸屏选用支持PROFINET/工业以太网接口的TP700 Comfort型显示屏。
4 远程监控系统软件设计
4.1 PLC控制程序设计
列车清洗机的主控制器程序通过STEP 7 V5.4软件来实现,PLC程序采用分块程序结构,根据每个设备的功能编定不同的功能块,如表2所示,组织块OB1是主程序,调用FB和FC等功能块。系统改造时,由于在远程端和本地端都增加了触摸屏HMI控制,所以对OB1进行了修改,OB1主程序设计如图2所示。此外,增加了通信块组合OB10、 FB200、DB200、 DB201、FC5 和 FC6。
如图1所示,电气控制系统采用S7-300型主控制器,污水处理采用S7-200型从控制器,选用EM277型通信模块,将S7-200型CPU作为DP从站连接到PROFIBUS DP网络,完成S7-300型主控制器和S7-200型从控制器之间的PROFIBUS DP网络通信。 CP343-1型通信模块是S7-300型主控制器的全双工以太网通信扩展模块,通信速度为10 Mbit/s或100 Mbit/s,把CP343-1型通信模块安装在S7-300型主控制器的导轨上,选择“S7协议”,CP343-1型通信模块即可把S7-300型主控器的PLC连接到以太网。

图2 OB1主程序设计流程

表2 列车清洗机部分程序块和数据库
除了增加通信功能块,还修改了自动洗车控制块FC20,FC20功能块的作用是自动洗车,FC1功能块的自动功能程序先调用FC20功能块 ,然后再调用FC11、FC12和FC13功能块,完成试运行、入库预湿预冷、侧洗前端洗和侧洗后端洗等工位。
4.2 远程监控系统界面设计
(1)防止二次污染。在经济技术适用性满足常州市河道清淤特点的前提下,比选并引进国内外先进的清淤技术和设备,多进行试点,推广环保清淤。同时开展对河道底泥的分析研究,制定出有针对性的疏浚底泥后续处理的方法,防止二次污染的发生。
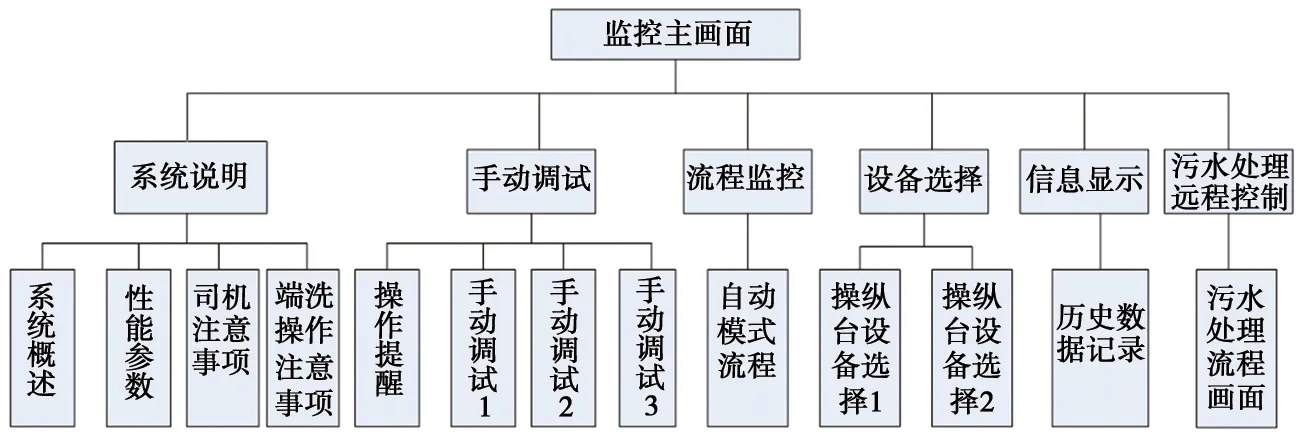
图3 远程监控系统监控主界面组成
列车清洗机进入主界面(图4)后,可选择清洗机面板(本地)控制和车辆段控制中心DCC面板(远程)控制,远程操作面板和本地操作面板是互控的。当使用清洗机本地端洗车时,远程操作面板的自动洗车和手动调试2个按键必须复位,反之亦然。远程操作面板上显示本地控制/远程控制,用户可自行选择,PLC程序会根据用户指令执行。面板设置有自动模式和手动模式[3]:在自动模式下,流程监控界面设计如图5所示,包括各个边刷、电动机、传感器的动作情况;手动模式主要用于各工位的调用和调试,单独检测清洗机各主要部件是否能正常工作以及是否能实现指定的动作,手动模式一般用于故障排除以及日常的例行检修工作[1]。报警管理设置了63个离散量报警,部分报警变量设置如图6所示,通过文本进行警告提醒和错误报警。

图4 列车清洗机主画面
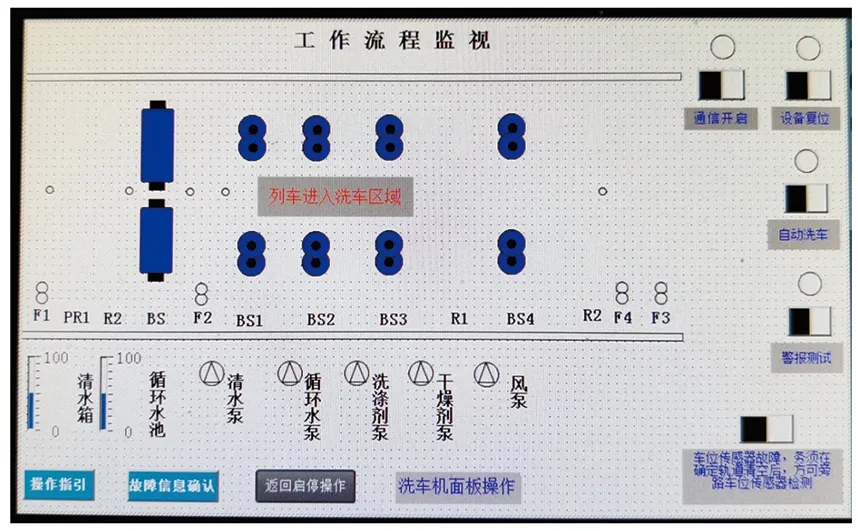
图5 列车清洗机工作流程监控界面
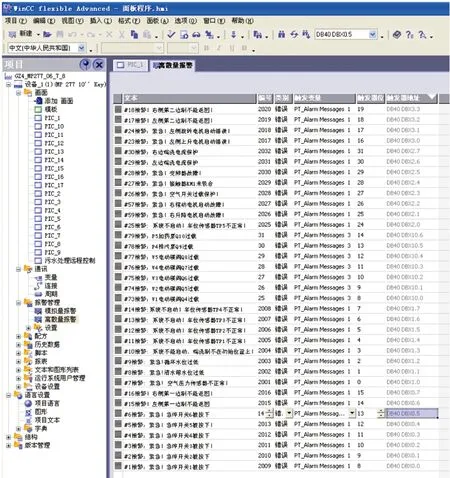
图6 部分报警变量设置
S7-315型PLC由电源模块、CPU模块、数字量输入模块、数字量输出模块组成[1],它们分别安装在同一机架上。列车清洗机共需要72个输入点、65个输出点。根据输入、输出点数和功能,设置了3个数字量输入模块、5个数字量输出模块,PLC主机硬件组态如表1所示。
5 远程监控后产生的经济效益
基于以太网的列车清洗机远程监控系统的试验设备如图7所示。列车清洗机实现远程监控后,取消了列车清洗机专职岗位,目前经改造后的列车清洗机为无人值守状况。经过1年试验,对改造前有人值守和改造后无人值守工时进行了对比,如表3所示。

图7 基于以太网的列车清洗机远程监控系统的试验设备
由表3计算得出,采用列车清洗机远程监控系统后,全年节约工时约1 962 h,若以初级工薪资计算,每年每台列车清洗机能节省约6万元成本费用。
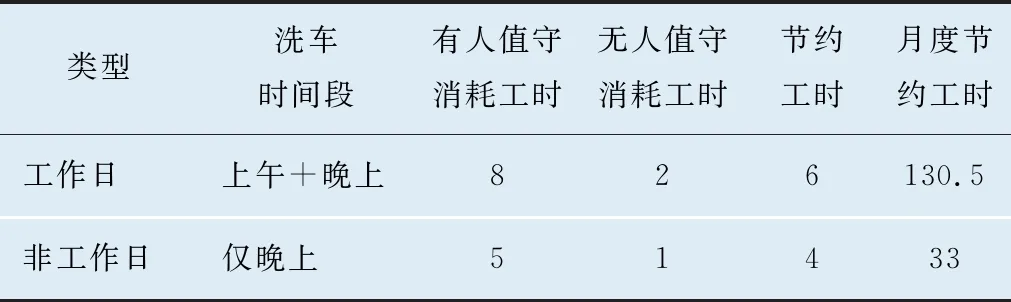
表3 采用列车清洗机远程监控系统前后节约工时对比 h
6 实施过程中可能带来的风险及防范措施
采用列车清洗机远程监控系统后,无人值守洗车与有人值守洗车相比,最大的不同点是清洗机现场没有人员进行实时监控,由远程端当班检调人员负责洗车监控与故障应急处理。主要的风险及防范措施如下:
(1) 在洗车过程中,若有人员进入清洗机清洗区,会带来人身安全风险,若远程监控端的视频监控发现异常,应及时停止洗车;
(2) 通过视频监控发现信号灯异常时,应及时停止洗车,并与乘务人员沟通,开放洗车信号,让列车不洗车直接通过清洗区。
列车清洗机远程监控经过1年运行后,至今未发生任何不可控风险,证明以上风险是可控的。
7 未来展望
本文中的列车清洗机远程监控系统可随时扩展以增加接口,可通过4G无线网络和云平台,将车辆段内的清洗机、多个库房的顶棚照明、架车机等设备站点的视频监控和设备运维信息组成一个车辆段的局域网,最终实现车辆段内清洗机、照明和架车机等设备集中远程控制,将进一步降低成本,减轻人员劳动强度。