BDS 伪距差分技术在飞行器上的应用
2021-08-29刘宪阳董启甲单建丰董娟娟
刘宪阳,金 根,2,董启甲,单建丰,董娟娟
(1.航天恒星科技有限公司,北京 100086;2.天津航天中为数据系统科技有限公司,天津 300462)
0 引言
在飞行器日常飞行和执行任务过程中,着陆是一个重要的飞行阶段。目的地复杂的地理、电磁、气象等环境,决定着飞行器能否安全准确地着陆。为了达到安全准确着陆目的,通常需要安装无线电引导设备以协助飞行器实现安全着陆。从最早期的非自主式的仪表着陆系统到先进的微波着陆系统[1],为飞行器控制系统提供了精确可靠的导航定位数据,在保障飞行器安全着陆方面起到了越来越重要的作用。
全球定位系统(global positioning system,GPS)的建立使飞行器着陆进入了新时代。随着我国北斗卫星导航系统(BeiDou navigation satellite system,BDS)的建立及全球化应用,BDS 正在替代GPS为各种飞行器提供精确的导航服务。
1 北斗卫星导航系统
1.1 简介
第3 代北斗卫星导航系统即北斗三号(BeiDou navigation satellite system with global coverage,BDS-3)是我国自行研制的全球卫星导航系统(global navigation satellite system,GNSS),也是继GPS、格洛纳斯卫星导航系统(global navigation satellite system,GLONASS)之后的第3 个成熟的GNSS。我国的 BDS、美国的 GPS、俄罗斯的GLONASS 及欧盟的伽利略卫星导航系统(Galileo navigation satellite system,Galileo)是联合国卫星导航委员会已认定的供应商[2-3]。
1.2 发展历程
2000 年底,我国建成了北斗卫星导航试验系统即北斗一号(BeiDou navigation demonstration system,BDS-1),向中国本土提供服务;2012 年底,建成了北斗卫星导航(区域)系统即北斗二号(BeiDou navigation satellite(regional) system,BDS-2),向中国本土及周边地区提供导航服务。2020 年06 月23 日,我国在西昌卫星发射中心用长征三号乙运载火箭成功发射BDS 第55 颗导航卫星,即BDS-3 最后1 颗全球组网卫星,全面建成BDS-3 并向全球提供服务。
1.3 发展特色
BDS 有3 个特点:①BDS的空间段采用3 种轨道卫星组成的混合星座,与其他卫星导航系统相比,高轨卫星更多,抗遮挡能力强,尤其低纬度地区性能特点更为明显;②BDS 提供多个频点的导航信号,能够通过多频信号组合使用等方式提高服务精度;③BDS 创新融合了导航与通信能力,具有实时导航、快速定位、精确授时、位置报告和短报文通信服务5 大功能[4]。
2 伪距差分定位技术
2.1 工作原理
伪距差分定位功能的完成需要基准站和移动站共同完成[5]。图 1 为单基线差分系统工作示意图。工作原理为:将基准站安放在精确坐标点上,基准站和移动站同步接收卫星导航信号,基准站通过通信链路播发基准站输出的差分信息,移动站接收基准站广播的差分信息,同时进行本地观测,将同步观测的原始数据进行双差处理,可以消除卫星钟差、星历误差、电离层和对流层误差、接收机钟差等非差接收机难以消除的系统误差,通过伪距差分实现高精度实时定位,从而达到精确测量的目的。根据已知基准站位置和计算得到的基线长度,可以实时获得本地的精确3 维(3D)坐标[6-8]。

图1 伪距差分原理
2.2 误差源及定位实现过程
利用BDS 进行定位测量时,涉及到的误差主要有:①与卫星有关的误差,包括卫星轨道误差、卫星钟差、相对论效应;②与传播途径有关的误差,包括电离层延迟、对流层延迟、多路径效应;③与接收机有关的误差,包括接收机天线相位中心的偏差和变化、接收机钟差、接收机噪声[9]。
测量误差分布如图2 所示。
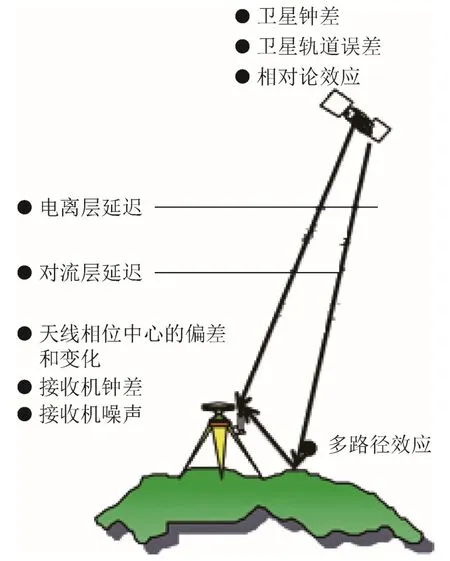
图2 测量误差分布
伪距差分技术就是通过求差法消除或削弱观测值中所包含的相同或相似误差,从而将其影响降到最小。基本伪距观测方程[10-12]为

式中:ρ为接收机到卫星的观测距离;R为接收机到卫星的几何距离;c为光速;δtT为GNSS 卫星钟差;δtR为接收机钟差;δtrel为相对论效应带来的时间误差;dS为卫星星历误差引起的测距误差;dion为电离层延迟引起的测距误差;dtro为对流层延迟引起的测距误差;dmul为多路径效应引起的测距误差;εant为天线相位中心偏差;εφ为接收机载波相位测量噪声引起的测距误差。
卫星星历系统偏差可通过补偿进行消除,随机误差部分可通过单差法消除,同一颗卫星的星历误差、卫星钟误差、相对论效应误差对于不同的接收机来说是相同的。若2 台接收机相距较近,对同一颗卫星的电离层延迟也是近似相同的,而当二者高程相差不大时,对流层延时对于2 台接收机也近似相等。
对某一颗共视星来说,采用基准站(A 接收机)与移动站(B 接收机)之间的差分来消除卫星钟差、相对论效应误差,对于A 接收机和B 接收机,伪距单差Δρ观测方程为

接收机之间的单差消除了大部分的系统误差,可通过再次作差消除接收机间钟差。
定义双差为不同卫星之间单差原始数据的再次差分。一般选取1 颗卫星作为参考星,将其他卫星的观测量与参考星的观测量作差分。伪距双差观测方程可表示为

式中上标i、j代表卫星编号。用双差伪距进行相对测量的误差主要有3 项:①伪距双差后的残余系统误差与噪声之和∇Δεφ;②多径影响误差项;③天线误差项∇Δεant。因此当共视卫星观测数≥4 时,即可采用最小二乘方法确定基准站和移动站之间相对3 维(3D)位置。
3 BDS 单频伪距差分定位精度分析
3.1 伪距差分精度分析
在双差伪距定位中,根据误差传播定律,双差观测值的噪声将放大2 倍,双差伪距观测精度为0.23 m;但卫星钟差及接收机钟差则完全消除,电离层延迟和对流层延迟将在差分中被削弱,多路径通过抗多径天线和环路抗多径算法处理后也可显著降低。双差先验误差如表1 所示。
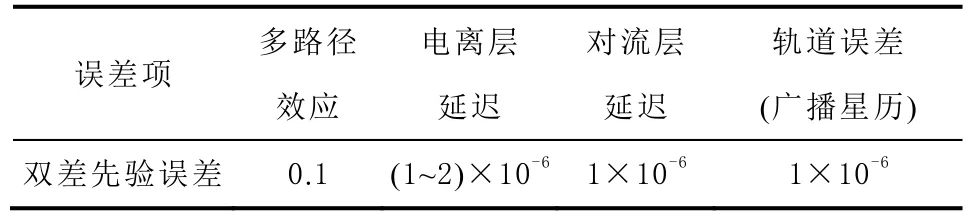
表1 定位先验误差大小 m
考虑到多路径效应、优于0.002 m的天线相位中心稳定度、伪距测量热噪声,以及和距离相关的误差,总的伪距观测噪声将达到(0.33 m+4×10-6m)左右。
将双差伪距观测方程写成矩阵形式,则有

式中:L为测量误差;X为基线向量的改正数;A为基线向量的改正数的设计矩阵。
若同一历元观测4 颗以上的导航卫星,设权矩阵为P,则可以组成法方程式

解法方程得

基线向量的改正数X的协方差矩阵DXX为

式中σ x、σy、σz分别为X、Y、Z方向误差。则水平定位误差σH、高程定位误差σV、空间位置误差σp可估算为
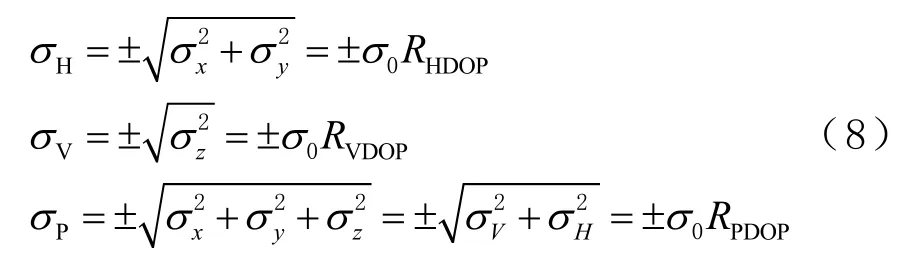
式中:RPDOP为空间位置精度因子;RHDOP为水平位置精度因子;RVDOP为高程精度因子。
RPDOP、RHDOP、RVDOP值取决于2 台接收机的共视导航星数及其相对于用户的几何分布,而与信号的强弱或接收机的好坏无关,可由实际收星情况计算。通常在无遮挡的正常星况下,定位精度因子在3 以下;因此理论上,在3σ条件下,伪距差分水平精度为1.58 m+1.9×10-5m,垂直精度为2.47 m+3×10-5m,能够实现高精度定位。
3.2 BDS 伪距差分定位精度测量
使用2 台自主研制的高精度导航接收机,其中1 台作为基准站,1 台作为移动站。基准站由监控计算机、上位机和BDS 双用户信号仿真器构成。按照目前BDS 卫星轨道和卫星分布模拟实际飞行场景。实验采用BDS B3 导航信号,信号频率为1 268.52 MHz。通过实际测试来分析BDS 伪距差分定位精度。实验场景搭建及数据信息流如图3 所示,各设备功能及接口如表2 所示。

表2 实验设备及功能接口介绍

图3 模拟实验设备关系
工作流程:基准站接收导航信号,定位后解算出自身位置并输出观测量给基准站监控计算机,监控计算机解析观测量信息并取一段时间(这里取10 min)内基准站位置的平均值且量化输出。地面监控计算机解析出基准站位置后,标定基准站位置,使得基准站按照固定位置输出自身位置信息。监控软件使用界面介绍如图4、图5 所示。移动站接收基准站发出的差分数据,实现伪距差分定位并输出解算结果给上位机,上位机存储解算结果。

图4 监控计算机控制界面

图5 监控计算机解析界面
实验采用有线形式传输差分数据,利用信号仿真器实现基准站与移动站10 km的作用距离。在实际使用时,需要采用无线设备发送差分数据。
通过分析上位机存储的导航观测量,伪距差分定位位置精度如图6 所示,移动站单点定位位置精度如图7 所示。
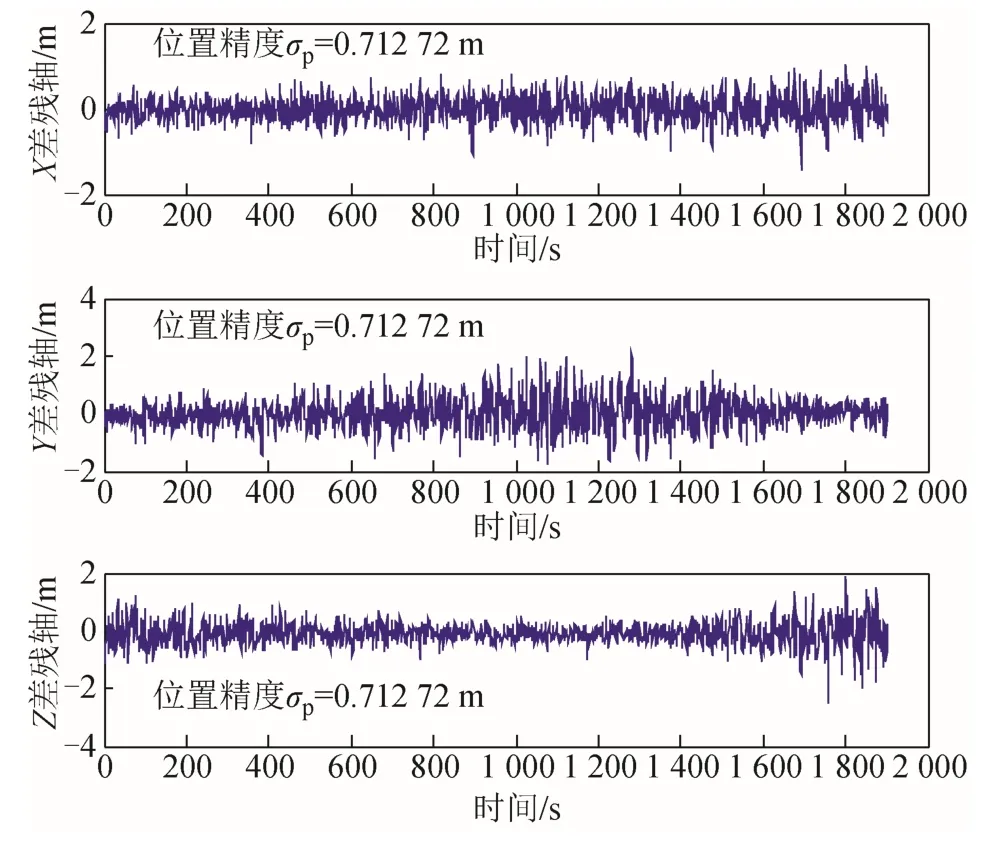
图6 WGS-84 坐标系下差分定位位置精度

图7 WGS-84 坐标系下单点定位位置精度
由图可以看出,BDS 伪距差分定位精度较单点定位精度有较大提升,实现了高精度导航定位。
4 结束语
本文分析了BDS 伪距差分定位技术,搭建了模拟运行环境,并分析了BDS 伪距差分定位精度。BDS 伪距差分较单点定位精度有较大提升,BDS可以为飞行器提供高精度的导航服务。通过基准站的小型化设计和便携式设计,BDS 可以为飞行器提供快速、灵活、准确的位置服务,为飞行器在军事侦察、复杂的地理位置勘测、紧急救援等任务中提供有力的保障。
