高速铁路GNSS 框架控制网平差基准一致性检验
2021-08-29王剑辉赵有兵李旭洋
王剑辉,尹 彤,赵有兵,张 莹,李旭洋
(1.广东省地质测绘院,广州 510800;2.自然资源部 测绘标准化研究所,西安 710054;3.中铁二院工程集团有限责任公司,成都 610031;4.自然资源部 第一地形测量队,西安 710054)
0 引言
高速铁路框架控制网(high-speed railway frame control network,CP0)应在初测前采用全球卫星导航系统(global navigation satellite system,GNSS)测量方法建立空间3 维(3D)控制网,全线一次性布网,统一测量,整体平差,作为全线(段)的平面坐标框架基准[1]。CP0 外业测量时,应联测国家A 级、B 级GNSS 控制网或国际GNSS 服务组织(International GNSS Service,IGS)连续运行参考站等高等级已知点进行整网基线解算和平差计算。
我国目前使用的坐标系统为2000 国家大地坐标系(China geodetic coordinate system 2000,CGCS2000),其坐标框架为国际地球参考框架1997(international terrestrial reference frame,ITRF1997),历元为2 000.0。其起始历元至今已跨度二十余年,由于亚欧板块的绝对运动及内部子板块的相对运动,CGCS2000的很多框架点位置已经发生较大变化。所以在CP0 与CGCS2000 框架点或 IGS 站联测时,大跨度的高等级点的CGCS2000 坐标跟其当前历元坐标是否具有一致性,是确保基准稳定的关键。为了避免将基准误差带入平差结果中去,必须提前对高等级已知点进行一致性验证。为此,本文研究赫尔默特(Helmert)模型算法,并使用Helmert 法对高等级已知点稳定性进行一致性检验,探测并剔除有问题的高等级已知点,以避免在CP0的解算中引入基准误差,从而得到更为精确的坐标。
1 基准一致性检验方法
Helmert 法能够计算输入坐标集到参考坐标集的变换参数,从而体现出2 套坐标集之间在平移、尺度、定向等方面的相关变化特性[2],并通过转换后的残差探测和定位异常坐标点。Helmert 模型主要是通过对2 套坐标集进行对比,通过2 套坐标集公用点求取Helmert 模型7 参数,即3 个平移参数、3 个旋转参数和1 个比例因子[3],并按照7 参数将检验坐标系坐标转化到参考坐标下。该模型建立的前提是承认这2 套系统的质量重心是一致的[4]。采用最小二乘约束平差方法,将2 套坐标的差异导入Helmert 模型,然后采用参数平差模型,最终估计出Helmert 参数,同时求取坐标残差[5]。
对于比较大型的区域或全球网络的坐标,则应采用空间直角坐标(X,Y,Z)形式。在这种情况下,估计的Helmert 转换参数是指地心笛卡尔坐标系。该坐标系下的转换模型为
式中:Xlarge-0为大区域的参考坐标矩阵;Xlarge为大区域的输入坐标矩阵;X0为平移向量矩阵;Ri(ri)为是绕i轴的旋转角度ri的旋转矩阵,i=x、y、z;k为缩放参数。
对于地方网络和小区域网络,适合采用测站空间直角坐标(N,E,U)形式,则估计的变换参数将引用以输入坐标集重心(质量中心)为原点的局部地平系统。输入坐标集的重心计算公式为
借助于重心X的椭球坐标和,将这2 个坐标集转换为局部地平系统,即
式中:Xlocal为局部地平坐标系坐标矩阵;Ry和Rz为y轴或z轴的选择矩阵;和为重心X的椭球坐标;X为须转换的坐标向量。
按式(4)变换输入坐标集与参考坐标集之间差的平方和,通过最小二乘法来估计方程中的Helmert 变换参数。

式中:Xlocal-0为小区域的参考坐标集局部地平系坐标;Xlocal-1为小区域输入坐标集局部地平系坐标。
无论大区域还是地方小区域,在确定了3 个平移参数、3 个旋转参数、1 个比例因子之后,可以根据式(5)将输入坐标转换系至参考坐标系,得到转换后的参考坐标系坐标,即

式中:Xout为转换后参考坐标矩阵;Xin为输入坐标矩阵。
然后与原参考坐标系坐标进行比较,得到转换后的残差,为:
式中:ΔXlarge为大区域转换后残差矩阵;ΔXlacal为小区域转换后残差矩阵。
计算转换得到的参考系坐标集与对应的原参考坐标集的差异值,即N(北)、E(东)、U(天顶)3 个方向的模型残差分量[6],获得Helmert 转换残差,当N、E、U 3 个方向的坐标模型残差大于该方向上综合中误差的3 倍的时候,即可判断该坐标不符合2 个坐标集的整体一致性。
在高速铁路框架控制网平差基准一致性检验中,可采用以上方法准确判断和定位有问题的高等级已知点。
2 实验与结果分析
本文采用2017 年年积日第214—222 天,某铁路CP0的数据进行实验分析。该数据分2 轮进行外业观测,每轮同步观测5 个时段,白天和夜间观测均匀分布,时间不低于5.5 h,轮间搭接2 个CP0 控制点,每个时段数据合格。求解14 个CP0控制点,基线解算和平差计算的起算点选用周边10 个 IGS 站,即北京房山站(BJFS)、长春站(CHAN)、拉萨站(LHAZ)、波利根站(POL2)、上海天文台站(SHAO)、韩国站(SUWN)、中国台湾桃园站(TWTF)、蒙古站(ULAB)、乌鲁木齐站(URUM)、武汉站(WUHN),在2017 年年积日第214—222 天期间内,这些IGS 站的数据均比较完整,数据质量良好,P1 多路径影响mp1和P2 多路径影响mp2 值均小于0.5 m。CP0 及IGS基准站网型如图1 所示。
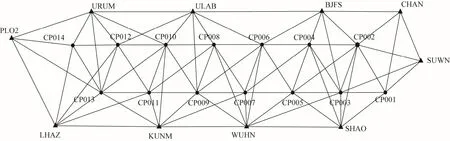
图1 CP0 及IGS基准站分布网型
2.1 数据处理
高精度基线解算采用麻省理工学院(Massachusetts Institute of Technology,MIT)和美国斯克里普斯海洋研究所(Scripps Institution of Oceanography,SIO)联合开发的加米特(GAMIT)/格洛布克(GLOBK)软件10.70 版本[7]。GAMIT/GLOBK 软件主要功能模块包括轨道积分程序、观测方程构建程序、单差自动修复周跳程序、双差自动修复周跳程序、交互式修复周跳程序、最小二乘求解程序等[8]。软件基于多种改正模型,采用优化的策略,可针对上千千米的超长基线,实现毫米级的高精度基线解算[9]。
在基线解算中,固定站的N、E、U 3 个方向分别进行松弛约束,约束分别为5、5、10 cm,分别得到年积日第214—222 天共9 个时段的10 个IGS 站的单时段松弛解,这10 个IGS 站为BJFS、CHAN、LHAZ、POL2、SHAO、SUWN、TWTF、ULAB、URUM、WUHN。
2.2 Helmert 转换坐标残差指标定位异常点
在得到单天松弛约束解后,分别提取BJFS、CHAN、LHAZ、POL2、SHAO、SUWN、TWTF、ULAB、URUM、WUHN 等10 个站的每个时段的松弛约束解的空间直角坐标,作为第1 个坐标集;收集该10 个站在国际ITRF2014 框架内标准历元坐标作为参考数据集;对第1 坐标集和参考坐标集进行Helmert 转换;根据Helmert 转换参数计算坐标转换残差。根据Helmert的坐标残差指标可以定位异常点。
本次采用Helmert 模型计算10 个IGS 站单个时段松弛解坐标与 ITRF2014 标准历元坐标的Helmert 转换坐标残差。残差如表1 所示。
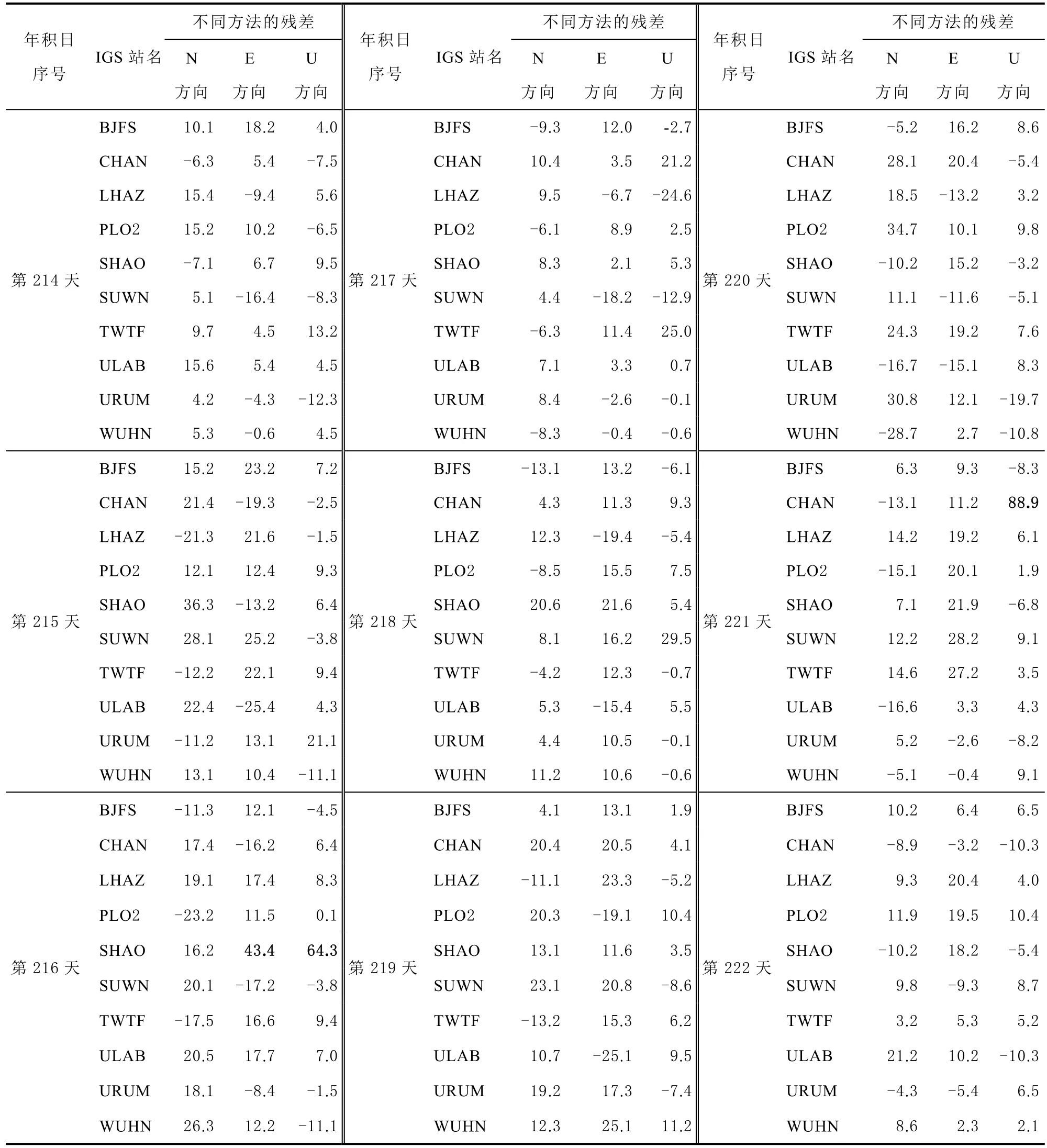
表1 各时段松弛解Helmert 转换坐标残差 mm
由表可知:2017 年年积日第216 天SHAO 站在E 方向的残差为43.4 mm,大于2 倍中误差,U方向残差为64.3 mm,大于3 倍中误差;2017 年年积日第221 天,CHAN 站在U 方向的残差为88.9 mm,大于3 倍中误差。
由此可以判断出2017 年年积日第216 天的SHAO 站、2017 年年积日第221 天的CHAN 站存在数据质量问题,导致了解算的坐标精度降低,需要将其剔除掉重新计算,才能保证基准平差不引入基准误差。
2.3 单天解卡方检验
卡方检验是一种非连续性资料的假设检验方法。基于卡方检验可实现3 种检验:①拟合度检验,比较2 个及2 个以上样本率;②相关性分析,2 个分类变量之间有无关联性;③统一性检验,检验2 个或2 个以上总体的某一特性分布[10]。
在GLOBK 平差中,可以通过卡方检验来宏观了解平差基准误差的大小。平差后的卡方检验值越小越好,如果卡方检验值大于1,说明平差基准存在误差。本实验将通过卡方检验方法来验证前期Helmert的分析结果。
实验对9 个时段分别进行了单天平差计算,约束10 个IGS 站,采用GAMIT/GLOBK 软件对每天的基线文件进行平差计算,在获取单天解的同时也可以得到单天解的卡方检验值。该数据平差后的单天解卡方检验值如表2 所示。

表2 单时段平差的卡方检验
由表可以看出:2017 年年积日第216 天和第221 天这2 个时段的卡方检验大于1,说明这2 个时段约束平差的固定基准存在不一致的情况,但不能定位是哪些站出了问题。根据前面Helmert 残差分析的情况,可以更加准确地定位到出现问题的约束站,说明利用Helmert 残差可以确定异常基准点。
后面的平差过程需要针对有问题的时段,将有问题的站松弛开,约束其他没有问题的基准站重新进行单天约束平差。如果卡方检验通过,则须在单天数据中剔除掉有问题的基准站,或者替换成其他基准站,重新计算基线和平差。
3 结束语
本文通过与约束平差的卡方检验指标进行对比,证明利用Helmert 模型计算残差来发现和定位有问题的基准站是可行的。在CP0 数据处理中,尤其是对大区域或者含IGS 站在内的超大区域的CP0 数据进行处理时,必须严格验证所选国家A级、B 级GNSS 控制网或IGS 站等高等级已知点的坐标一致性。通过Helmert 模型能够分析出高等级已知点异常坐标,准确定位异常数据,从而避免将误差带入控制网中,最终提高控制网的计算精度。
