基于线状点云的水深测量精度快速评定方法研究
2021-08-26杨松孙慧敏张振军
杨松 孙慧敏 张振军

摘要:
水下地形测量精度主要采用主测线与检查线的水深比对较差进行评定,但在实际应用时,现有的评定方法不能够准确、快速地进行分析统计,往往耗费大量的人力与时间,也无法合理地表达水深测量的精度。为了能够充分利用检查线数据快速准确地对水深测点进行精度评定,全面合理判定测深点的质量,进而反映水下地形测量的精度,研究提出了一种新方法。该方法融合了GIS空间分析技术,将水下地形测量的主测线以及检查线的水深数据离散为空间点云矢量数据,开发数据处理与检测程序,快速地进行水深测量精度评定。该方法在长江荆州河段水下地形测量中得到应用,显著提高了参与精度评定的有效测点数以及评定效率,更加合理、准确地表达了水深测量数据的质量。
关 键 词:
水深测量; 检测线; 点云; 精度评定; 長江荆州河段
中图法分类号: P229
文献标志码: A
DOI:10.16232/j.cnki.1001-4179.2021.07.019
0 引 言
水下地形测量是河道勘测工作过程中的一项重要内容,测前需要在测区河道范围内布设主测线和检查线。其中,检查线主要用于对水深测量的精度进行评定,通过比较主测线与检查线的交叉点较差来检验和评估水深测量成果的精度和可靠性[1-2]。
目前,按照SL257-2017《水道观测规范》[3]中7.6.8和7.6.9技术要求规定:“水下地形测量时,应在地势较为平坦区域布设一定数量的检查线,检查线的方向应与主测线垂直。单波束测量时,检查线的总长度应不小于主测线总长度的5%;多波束测量时,检查线的总长度应不小于主测线总长度的2%。”规范[4]要求测深检查线与主测深线相交处:当水深小于等于20 m时,图上1 mm范围内主测线与检测线的水深点水深值比对较差应不大于0.3 m;当水深大于20 m时,图上1 mm范围内主测线与检测线的水深点水深值比对较差应不大于0.015H(相应的水深值)。
然而,现有精度检测方法在实际作业中往往遇到以下问题:① 满足图上1 mm范围内的主测线与检查线的交点个数较少,导致精度检测不准确;② 随着比例尺变小,图上1 mm代表的实际距离变大,即两比较点的实际距离变大,两点的高程比较的可靠性也降低,往往导致较差粗差率比较高;③ 仅采用在地形图中进行人为判读获取交叉点的差值,导致精度统计效率较低。
国内学者也对水深测量的精度评定方法进行了相关研究:杨梦云[5]研究了影响单波束测深仪测量精度的因素及消除措施;马耀昌等[6]研究了回声测深仪水深测量误差计算,以便提高大水深测量精度;黄珍雄[7]在单波束水下地形测量精度的改进方法研究中,通过重复断面较差、主测线与检查线所产生的交叉点高程较差等因素来评定水深测量的内符合精度;林红[8]在对水深测量数据进行精度评定时采取输出测线上点间距不大于5 m,计算主测线和检查线上的测点所确定剖面的交点,通过交点差值进行水深测量精度评定;吴敬文等[9]开发了水深测量质量检查软件,统计图上1 mm范围内主测线测点和检查线测点的河底高程差值,解决了人工计算方法效率较低的问题。上述研究方法仅是在现行规范要求下,采用主测线测点与检查线测点重合进行统计,但是,往往并不能恰好存在主测线与检查线测点刚好重合的情况。因此,在现行规范[1]中规定“图上1 mm范围内进行搜索”获取检查线上的测点作为评价水深测量精度的重合点,这样降低了水深测量精度统计的可靠性。针对目前在水深测量精度评定方法中存在的问题,本文提出了一种快速进行水深测量精度评定方法:① 对主测线与检查线上回声仪测量的线状点云数据进行提取;② 采用GIS空间邻近分析技术,快速准确地对水深测量进行精度评定以及成果的输出统计。
1 水深测量的线状离散点云数据
1.1 水深测量的原理
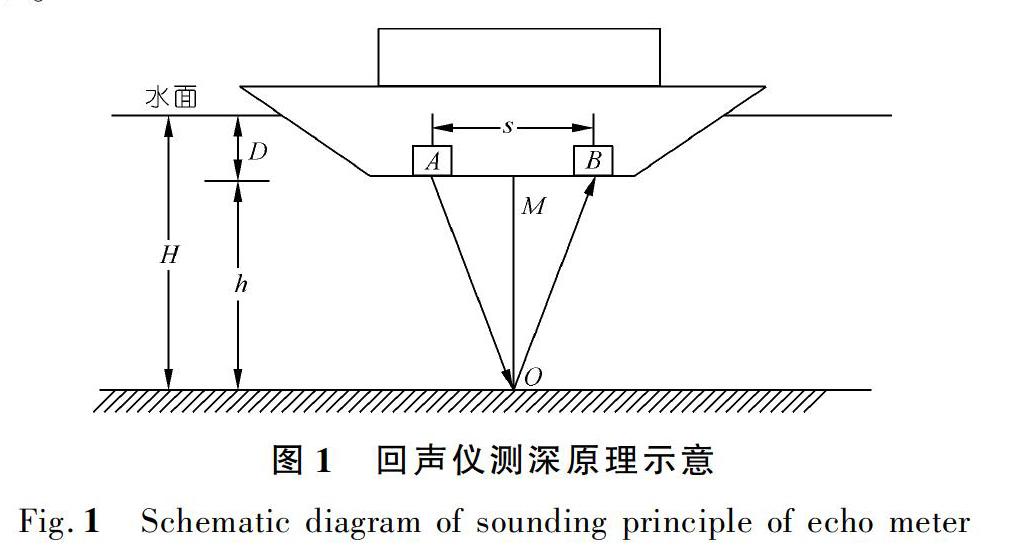
目前,水深测量的数据获取采用回声测深仪施测,并与DGNSS定位数据同步采集,水深测量采用Hypack软件导航。回声测深仪发射换能器A和接收换能器B之间的距离为S,称为基线(见图1)。发射换能器A以间歇的形式向水下发射频率为20~200 kHz 的超声波,声波达到水底后,一部分能量被吸收,一小部分能量被反射回来。接收换能器B将反射回来的声振动变为电振荡,通过电路放大、转换后显示并记录水深。[4]
式中:H为水面至海底的深度;D为船舶吃水深度(严格说是水面至换能器底面之间高度);h为测量水深;S为基线长度;C为声波在海水中的传播速度,标准声速为1500 m/s;t为声波自发射至接收所经历的时间。
显然,只要测出时间t,即可求出水深H,若换能器是收发兼用换能器,即AB=S=0,取C=1 500 m/s,则测量深度h可表示为
1.2 水深测量原始数据文件格式解析
Hypack综合导航系统用于水域走航式测量(如水深测量、旁侧声纳和浅地层剖面测量)的导航、定位[10]。该软件可以连接GNSS接收机、测深仪、侧扫声纳、罗经等不同设备,基于Windows操作系统下的图形化操作软件,采集的原始数据文件格式为RAW文件[11-12],包含了水深测量过程中的各个参数及信息,数据信息如图2所示,其RAW文件中对应的字段解释如表1~3所列。
1.3 获取水深点云数据
分析Hypack原始文件的结构信息,主测线的水深测量定标数据字段信息根据FIX定标时间和水深信息EC1输出时间,以及前后时刻的POS(坐标信息)数据,可插值计算出FIX行以及EC1行对应时刻的平面坐标信息。采用VS2010开发环境+C#编程语言开发水深测量的线状点云数据提取转换软件,如图3所示。该软件可实现RAW文件的解析读取,并进行水下测点数据向空间矢量数据的转换,实现主测线及检查线的水深测量点云数据的自动获取(X坐标,Y坐标,水深)。
2 基于GIS实现快速精准水深测量精度评定
水深测量的线状数据离散化为空间点云数据后,需要快速、准确地对水深测量精度进行评定。在采用本文提出的方法进行水深测量精度评定时,需要将检查线离散为点云数据,对于检查线测点和主测线测点搜索半径设置为实地距离0.2 m时,就可以搜索到比对点,相对于现行规范要求的“图上1 mm范围内”,明显地提高了精度评价的可靠性。
在进行主测线和检查线重合点比对时,若采用传统的统计方法,需要将主测线与检查线的水深点云数据展绘后,在地形图中逐点进行人工判读统计,分析计算效率非常耗时。鉴于传统方法的局限性,本文基于GIS技术,对主测线与检查线离散后的水深点云数据,通过GIS空间临近分析,可快速地获取一定距离范围内的重合点(即水深测量精度统计的比对点)。
由图4可以看出:JP为检查线离散测点,ZP为主测线离散测点,2个要素之间的距离按两者间最短间距(设置Search Radius,即2个要素彼此最接近的距离),采用GIS临近分析工具,可快速获取主测线与检查线点云数据的重合点。结合GIS空间数据的属性表关联,如图5所示,经过GIS临近分析后检查线测深点云数据的属性表中将新增字段(NEAR_FID)作为主测线测深点云数据属性记录的唯一值(FID),同时,也能够自动统计主测线测深点云数据与检查线测深点云数据之间的距离(NEAR_DIST),即2个要素彼此最接近的距离。通过检查点与主测点的属性表关联进而可计算两者水深或者河底高程的差值(较差),依照文中表1的要求,实现水深测量精度的评定。
3 实例分析
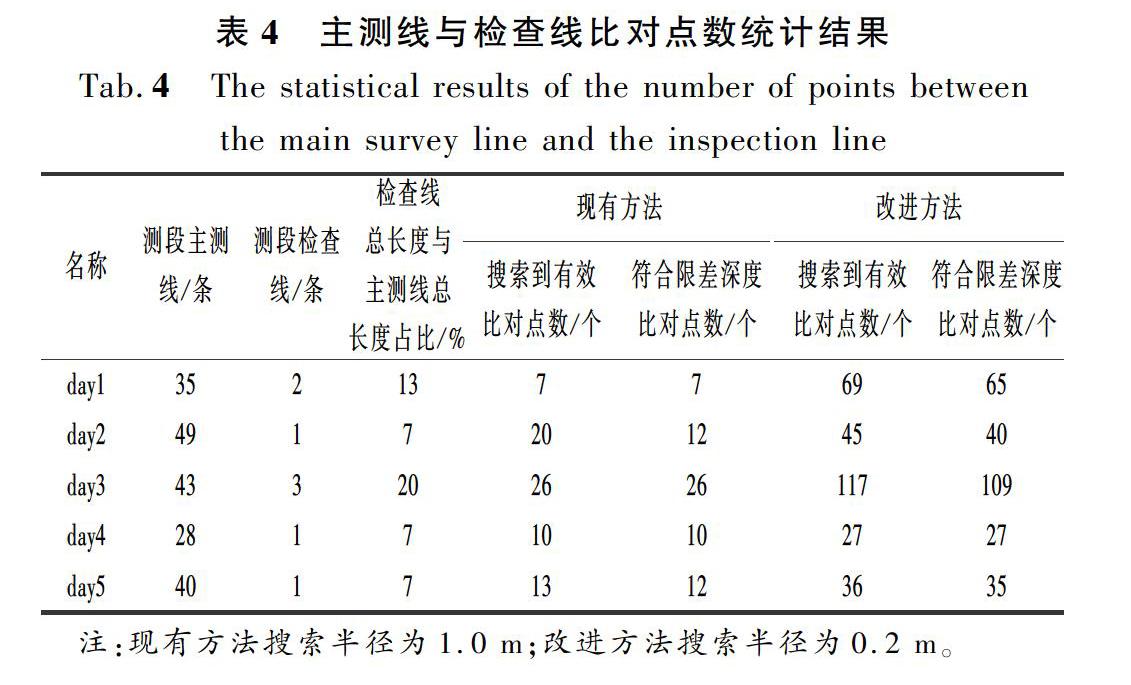
选择长江荆州河段为实例,采用单波束测深仪进行水下地形测量。施测比例尺为1∶1 000,测区范围内共布设主测线195條,检查线8条,测点间距按照8 m设置,共施测5 d。经统计该测区的主测线与检查线总长度(详见表4列出的检查线总长度与主测线总长度占比),满足SL257-2017 《水道观测规范》中 “检查线的总长度应不小于主测线总长度的5%” 的规定,因此,施测的检查线可作为水深测量精度统计的数据。
采用RTK结合测深仪进行水深测量,在测量期间,控制好航行速度、GNSS工作状态、测深仪安装姿态等,以此进一步保证水深采集精度[13-14]。对该测区内5 d施测的水下地形测量数据,进行主测线及检查线数据分类提取,通过本文开发的软件获取主测线以及检查线的水深点云数据,结合GIS技术采用现有方法与本文提出的改进方法进行质量检查对比,如表4和图6结果显示。
(1) 采用现有方法,将主测线的测点进行图上1.0 mm范围内搜索有效的检查线测点个数较少,不符合规范要求[4]。本文提出的改进方法将主测线与检查线数据进行离散点云数据后,参与比对的有效点数明显增加,详见表4中改进方法搜索到有效比对点数,也可根据图6所示,有效参与精度评定的比对点明显地增多。
(2) 采用现有方法,是根据规范要求的1.0 m范围内进行搜索,而本文提出的改进方法设置搜索半径为0.2 m,使得参与水深测量精度评定的比对点之间的位置更加接近,这样大大提高了精度统计的准确性。
(3) 采用现有方法,在对day2施测的水下测点进行精度评定时(详见表4),符合限差深度比对点数占搜索到有效比对点数仅为60%,因此,深度比对超限点数超过参加比对总点数的20%,不能满足规范[7]要求的精度指标。当采用改进方法后,搜索到的有效比对点数明显增加,符合限差深度比对点数达到90%,能够满足规范要求。因此,采用改进方法,可避免采用现有方法搜索到比对点数较少造成的错误评定。
(4) 采用现有方法,往往需要人工判断,点对点进行统计,通过改进方法结合了GIS空间分析使得搜索、分析计算效率大大提高。
4 结 论
水深测量精度评价主要采用主测线与检查线重合点的较差比对,依据现有规范要求的方法在实际工作中依然会存在一些问题,因此,本文提出了一种快速进行精度评定的方法。
(1) 通过分析测深数据的原始文件结构信息,开发软件自动提取主测线及检查线对应的水深点云数据(X坐标,Y坐标,水深),将线状水深测量数据离散为点云,有效地增加了检测线与主测线重合点作为比对点进行分析。通过本文提出的改进方法,可将现有规范中规定的搜索距离“图上1 mm范围内”缩小为实地距离0.2 m,使得参与评价的主测线测点与检查线测点距离更近,同时结合表4中搜索到有效比对点数明显增加,因此,可进一步提高水深测量数据精度评定的可靠性。
(2) 在水深测量精度评定中,采用了GIS空间临近分析及属性表关联,能够快速地实现水深测量点云数据之间的比对与计算,提高水深测量精度评定工作效率。
(3) 本文改进方法可适用于单波束和多波束水深测量。但是,当采用多波束进行水深测量时,多波束测深仪输出水深数据为点云数据,无需采用本文提出的将测线离散为点云数据的方法,可直接采用文中提出的GIS快速精准的水深测量精度评定方法进行评定,精度评定指标可执行表1规定。
参考文献:
[1] 成芳,杨晓华,付德强.水深测量测线布设优化方法研究[J].海洋技术,2012,31(4):14-18.
[2] 柴进柱.水深测量作业中的测线布设与实施策略研究[J].海洋测绘,2013,33(3):43-46.
[3] 水利部. 水道观测规范:SL 257-2017[S]. 北京:中国水利水电出版社,2017.
[4] 交通运输部. 水运工程测量规范:JTS131-2012[S].北京:人民出版社,2012.
[5] 杨梦云.影响单波束测深仪测量精度的因素及消除措施[J].人民长江,2012,43(21):42-44.
[6] 馬耀昌,惠燕莉,冯国正,等.大水深测量校正方法研究与应用[J].人民长江,2015,46(18):52-55.
[7] 黄珍雄.单波束水下地形测量精度的改进方法研究[D].南昌:东华理工大学,2013.
[8] 林红.论水下地形测量中的检查线布设与精度评定方法[C]∥地理信息与物联网论坛暨江苏省测绘学会2010年学术年会论文集,2010:3.
[9] 吴敬文,朱巧云,黄金发.水深测量中的质量控制与数据检查软件的开发[J].海洋测绘,2016(5):40-42.
[10] 解祥成,周儒夫.基于Hypack 2018软件GNSS三维水道观测技术与方法探讨[J].水资源研究,2019,8(5):8.
[11] 魏荣灏,张坤军.海洋测绘常用NMEA 0183数据协议格式解析[J].浙江水利科技,2020,48(1):64-65,69.
[12] 张振军,杨松,杨建.基于GNSS三维测量的河床空间信息一站式获取技术[J].水力发电,2019(9):75-79.
[13] 李宇,马洪蛟.提高水下地形测量GPS定位精度的探讨[J].现代测绘,2004(1):42-43.
[14] 陈鹏飞.GPS-RTK在水下地形测绘中的应用[D].舟山:浙江海洋学院,2015.
(编辑:刘 媛)
引用本文:
杨松,孙慧敏,张振军.
基于线状点云的水深测量精度快速评定方法研究
[J].人民长江,2021,52(7):115-119.
Rapid evaluation method of bathymetric accuracy based on Linear Point Cloud
YANG Song,SUN Huimin,ZHANG Zhenjun
( Hydrology and Water Resources Survey Bureau of Hanjiang River,Hydrology Bureau of Changjiang Water Resources Commission,Xiangyang 441021,China)
Abstract:
The accuracy of underwater topographic survey is mainly evaluated by the water depth difference between the main survey line and the inspection line.However,in practical application,the existing evaluation methods can not accurately and quickly analyze statistics,which often consumes a lot of manpower and time,and can not reasonably reflect the accuracy of water depth survey.In order to make full use of the inspection line data to evaluate the accuracy of the bathymetric point quickly and accurately,to judge the quality of the bathymetric point comprehensively and rationally,and to reflect the accuracy of underwater topographic survey,a new method is proposed.In this method,GIS spatial analysis technology is integrated,and the water depth data of the main survey line and the inspection line are discretized into spatial point cloud vector data.The data processing and detection program is developed to evaluate the accuracy of water depth survey quickly.This method has been applied to the underwater topographic survey in the Jingzhou section of Yangtze River,which significantly improves the number of effective measuring points and the evaluation efficiency,and more reasonably and accurately reflects the quality of the bathymetric survey data.
Key words:
bathymetry;detection line;point cloud;accuracy evaluation;Jingzhou reach of Changjiang River
