码头电力设备低频振荡抑制研究
2021-08-25俞雪丰
俞雪丰 吴 星
上海国际港务(集团)股份有限公司尚东集装箱码头分公司
1 引言
随着港口码头的发展,码头设备电气自动化的程度越来越高,电力公司切送电等电力操作引起的低频振荡,使港口电力设施设备易出现瘫痪现象,影响港口正常运行。安装PSS(Power System Stabilizer,电力系统稳定器)和SVC(Static Var Compensator,静止无功补偿器)能够有效抑制电力系统的低频振荡。文献[1]提出在PSS控制器中加入Prony分析环节,实时监测发电机的运行状态以便实现系统的闭环控制;文献[2-3]提出了采取测试信号与留数根轨迹相配合的方法来进行静止无功补偿器附加阻尼的控制参数优化设计;文献[4]提出了从频域与智能算法两个方面对PSS与SVC阻尼控制器的参数进行优化设计以实现对电力系统低频振荡的抑制。
采用改进的NSGA-II算法对SVC与PSS控制器进行参数协调优化,并在经典双机系统中进行仿真分析,结果表明,参数优化设计后的控制系统阻尼控制器对电力系统低频振荡有显著改善。
2 单机系统模型建立
选取经典单机系统为测试系统,其结构见图1。系统中的发电机采用三阶模型,励磁系统采取经典一阶惯性模型,忽略其电阻。

图1 单机系统结构图
含有PSS的励磁系统控制结构见图2,PSS的输入信号采用发电机转速偏差Δω,其动态数学模型[5]见式(1)。

图2 含有PSS的励磁系统控制结构图
(1)
式中,ω为系统发电机的转速;Ef为励磁系统的励磁电压;UPSS-ref为系统的基准电压;UG为发电机的机端电压;UPSS为电力系统稳定器的输出信号;KPSS为电力系统稳定器的控制放大参数;TWPSS为PSS的时间常数,取定值[6];T1、T2为PSS的时间控制参数;X1、X2为PSS模型的阶段性输出信号。
SVC具有快速调节无功的和维护电网稳定运行的作用。使用SVC来调控电力系统中的阻尼比,需加入附加阻尼控制器,以实现抑制系统低频振荡。以转速偏差Δω作为SVC的输入信号,其控制结构图见图3,其动态表达式见式(2)。

图3 SVC控制结构图

(2)
式中,B为SVC的等效导纳矩阵;KSVC为SVC的控制放大增益参数;USVC-ref为基准电压;Ui为负荷节点的电压;USVC为静止无功补偿器的输出信号;TWPSS为PSS的时间常数,取定值;Tf为SVC的时间常数,取定值。
3 基于改进遗传算法的控制器协调优化设计
3.1 交叉算子改进
NSGA2中使用算术交叉,搜索能力较弱,无法保证种群的多样性,引入算数交叉算子[7-8]改善此情况:
(3)
式中,α、β为算数交叉算子交叉参数,α+β=1,α,β∈[-1,2]且均匀分布。

3.2 变异算子改进
反向学习(Opposition-based Learning,OBL)已被证明是一种十分有效的区域搜索方法。具体原理是:在求某个给定问题的解x的时候,其初始值并不精确,只是一个随机数。故可以利用反向学习的思想,取x的相反值来作为下一个更接近最优解的值x*,计算公式为:
x*=m+n-x
(4)
式中,x∈R,x∈[m,n]。
推广到更高维度:
xj*=mj+nj-xj
(5)
式中,xj∈R,xj∈[mj,nj]。
将反向学习思想应用于变异环节,构成新的变异算子,给如下定义:对于种群中第t代个体X(t)=[x1,x2,…,xi],OX(t)*=[x*1,x*2,…,x*i]是其对象的反向学习个体,代入适应度函数,若f(OX*(t))优于f(X(t)),则将反向个体替代第t代个体进入下一代种群。新的变异算法见式(6):
X(t+1)=OX(t)*=[x*1,x*2,…,x*i]
(6)
3.3 SVC与PSS控制器参数协调优化
在系统中同时加入PSS与SVC能够提高系统的抗干扰能力,但考虑两者功能上有一定的矛盾性,故同时使用会产生相互影响使得系统不稳定,因此需要对SVC与PSS进行参数协调优化保证系统的整体性能。
考虑系统的超调量与反应速度,选取特征根实部σ最小与阻尼比最大为目标函数[9],见式(7):
(7)
式中,n为系统的运行模式;σ0、ζ0分别是预设的特征根实部与阻尼比;σi、ζi分别是第i个运行模式中的特征根实部与阻尼比。
约束条件见式(8):
(8)
KPSS、KSVC有相同的取值范围,将其等效成Ki,i表示系统中SVC与PSS的个数,将Ki、T1i、T2i作为算法的控制变量,Ki=rank(Kmin,Kmax),即在控制器增益的调节范围内随机产生的实数;T1i=1+fcrand/10、T2i=1+fcrand/10,其中fC为随机产生的+1或者-1,rand为在区间(0,5)内随机产生的实数,将[Ki,T1i,T2i],i=1,2,…,n作为初始种群,使用式(3)、(6)进行新的交叉与变异过程,流程见图4。
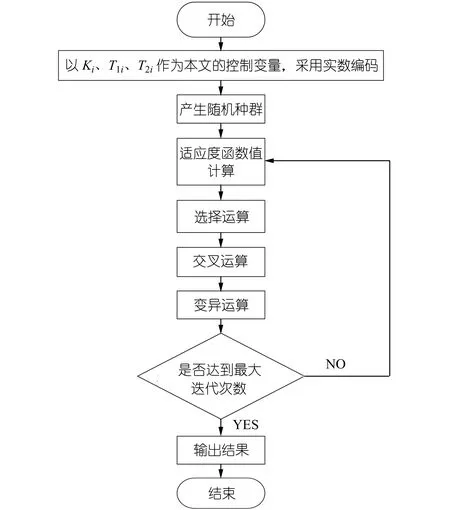
图4 优化算法流程图
4 算例分析
采用经典单机系统,SVC安装于节点3,发电机采用同步发电机,额定值设为600 MW,与10 kV无穷大系统相连,发电机侧安装有电力系统稳定器。在Matlab/Simulink仿真软件中建立单机电力系统模型,见图5。

图5 单机系统仿真模型图
发电机参数具体见式(9):
(9)
线路参数为:线路长度l=10 km,电阻R=0.017 55 Ω/km,电感L=0.873 7 mH/km;电容C=0.001 33 μF/km;负载的有功功率P=50 kW。
考虑电力系统鲁棒性,设计该模型在3种不同的运行状态下运作(见表1)。

表1 三种不同运行方式
取控制器初始参数见式(10):
(10)
取种群规模为50,最大迭代次数为100,交叉概率为0.8,变异概率为0.03。应用改进型NSGA-II算法对控制器的参数优化,优化后的结果见表2。

表2 优化后的参数结果
可得到正常负荷下的系统特征值见表3。
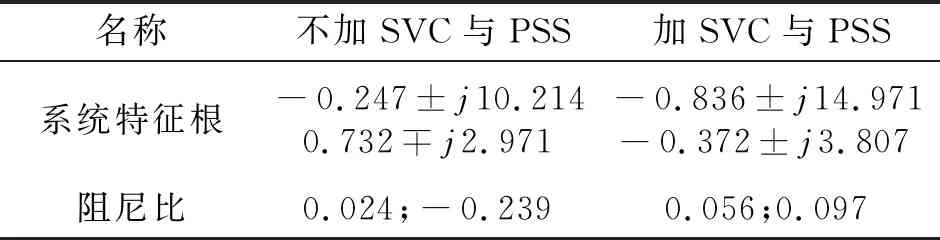
表3 加控制器前后特征值对比
加入控制器前后,系统的时域仿真图见图6、图7。

图6 发电机转速振荡图
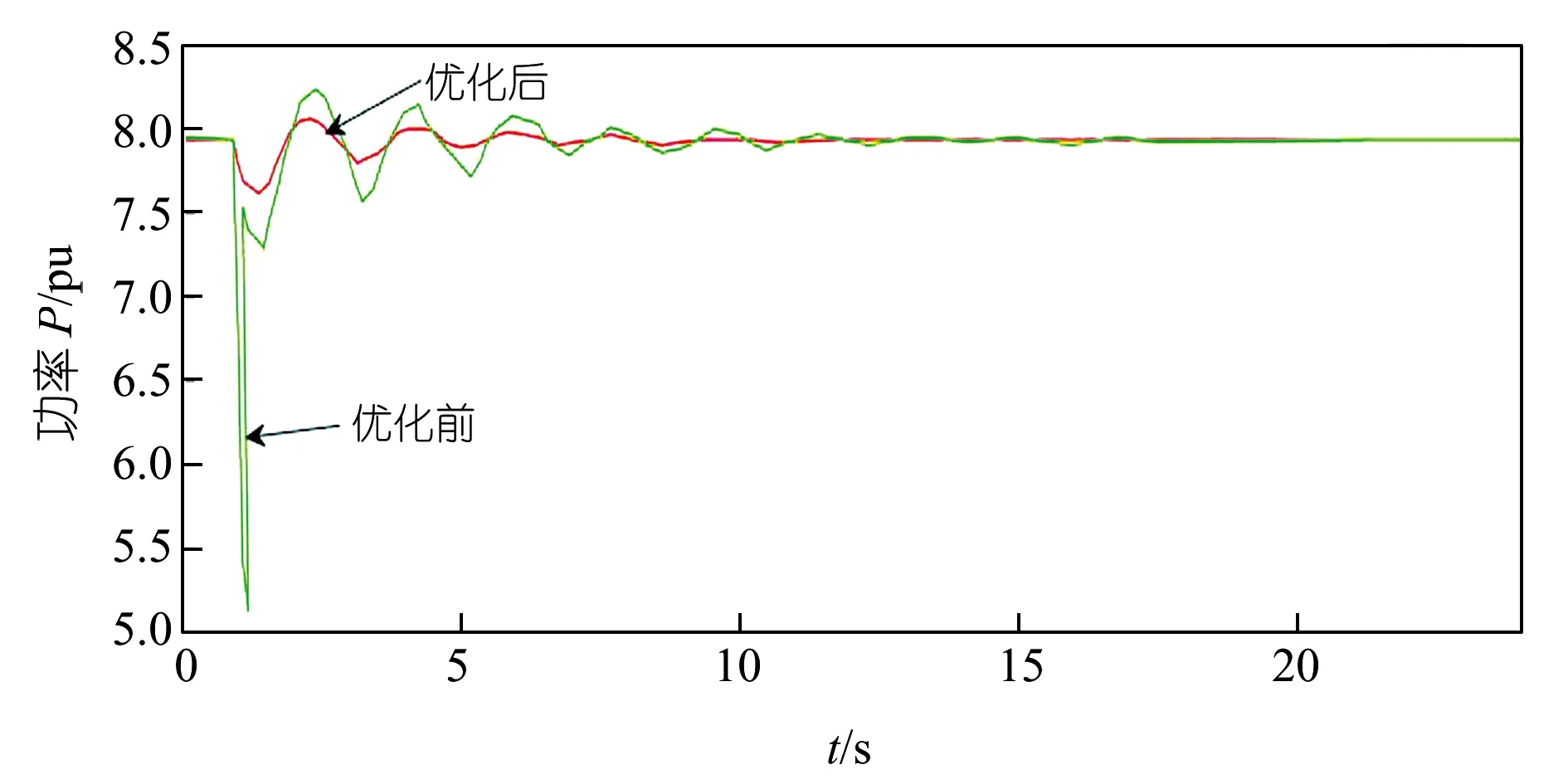
图7 节点5功率振荡图
对系统进行故障测试,在节点4处发生三相短路故障,t=0.2 s时切除故障,节点5处的输出功率变化情况见图8。
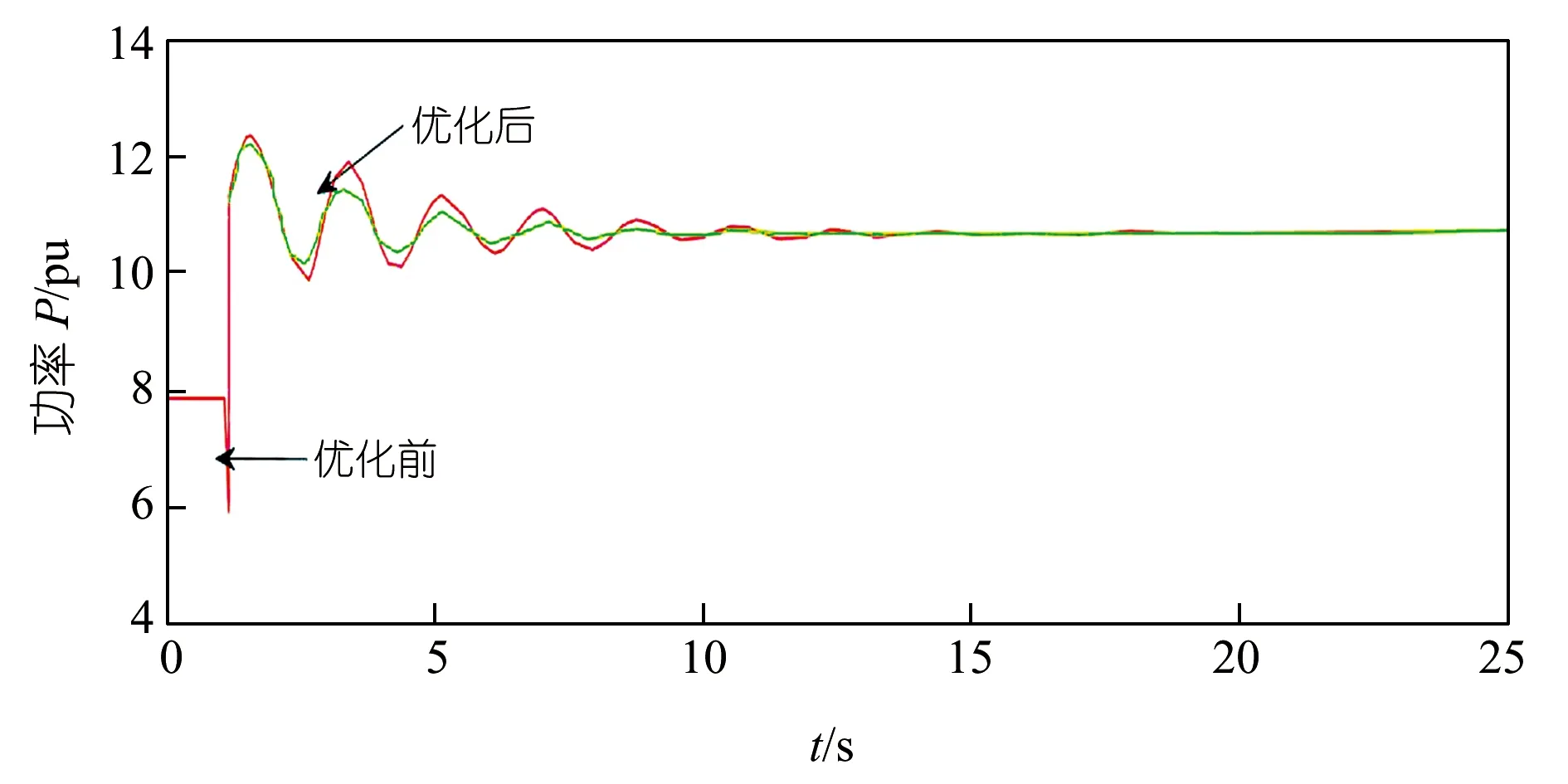
图8 三相短路下的节点4功率振荡图
从优化前后的特征根、阻尼比以及时域仿真结果可以看出,加入参数优化的控制器后不仅系统的特征根的实部与虚部全变为负数,阻尼比也有所提升,有了更好的阻尼裕度,并在系统三相短路的情况下仍然能够较好地抑制低频振荡,使得振荡时间降低,提高了系统的稳定性。
5 结语
提出了利用改进的遗传算法,对含有电力系统稳定器和静止无功补偿器的电力系统进行协调控制,优化其阻尼控制器控制参数。通过对比时域仿真波形图以及阻尼比,表明优化参数下的SVC与PSS对抑制电力系统的低频振荡有一定效果。
