基于汽车涂装的追踪式擦净设备防碰撞系统的 设计和实现
2021-08-23徐海岩任广通牛广飞谢东廷
徐海岩 任广通 牛广飞 谢东廷
摘 要:追踪式擦净设备具有耦合运动的特点,运动路径复杂,易发生碰撞或干涉,本文基于汽车涂装的追踪式擦净设备,研究其防碰撞系统。利用编码器计算车体理论移动位置,与实际进行比对自动判定其碰撞概率并给出警告。利用光电传感器检测设备与车身之间距离,距离过小时及时停止系统运行,解决汽车涂裝的追踪式擦净设备与车体发生碰撞的难题。
关键词:汽车涂装 追踪式 碰撞系统
Design and Implementation of Anti-collision System for Tracking Cleaning Equipment Based on Automobile Coating
Xu Haiyan,Ren Guangtong,Niu Guangfei,Xie Dongting
Abstract:The tracking type cleaning equipment has the characteristics of coupled motion, the movement path is complicated, and it is prone to collision or interference. This article is based on the tracking type cleaning equipment of automobile coating to study its anti-collision system. The encoder is used to calculate the theoretical moving position of the car body, and comparing it with the actual situation to automatically determines its collision probability and gives a warning. The photoelectric sensor is used to detect the distance between the equipment and the car body, and the system will be stopped in time when the distance is too small to solve the problem of collision between the tracking type cleaning equipment of the car painting and the car body.
Key words:car painting, tracking, collision system
1 引言
涂装车间面漆工艺前需要对车体进行擦净处理,最大程度减少后续喷涂工艺可能产生的喷涂缺陷[1]。在喷涂工艺前,车身输送过程中的工艺、环境等各种因素会对车身造成污染,车身大多存在油污、铁屑、打磨灰等杂质。喷涂工艺要求车身具有较高的洁净度,任何污染或杂质可能会造成车身缩孔、漆渣、不沾漆等质量缺陷,严重时甚至造成车身报废。对车身擦净是避免喷涂质量缺陷的重要方式,原始的擦净方式是人工进行擦净,人工擦净的车身洁净度不高,目前已经被自动化的擦净设备取代[2]。追踪式擦净设备是在车身前进不停的情况下对车身进行擦净,在提升洁净度的同时还满足了高产量的需求。但是需要擦净设备和车身运动的高度配合,一旦出现微小差异擦净设备就会偏摆超限,与车身碰撞而致使车体损伤甚至报废,因此需要设计一款防撞系统规避此现象。
2 系统组成及原理
2.1 光感防撞系统
2.1.1 光感防撞系统组成
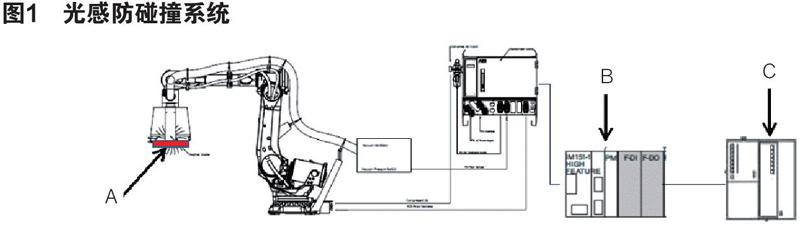
擦净设备防撞保护系统,是由四路收发一体封闭光电型传感器图A及西门子远程输入输出模块图B所示和西门子可编程序控制器电路图C所示组成的。系统组成框图如图1所示。
当系统正常启动工作时,光电检测系统会以60HZ的频率检测光电传感器的反馈信号,正常的光电传感器通过西门子远程输入输出模块反馈给西门子可编程序控制器的为数字信号“1”,反之光电传感器反馈为数字信号“0”,系统则认为擦净设备与车体发生碰撞,再通过西门子可控编程器内设定的逻辑安全程序使擦净设备立即进入停车状态不再运行,从而达到保护车体不会因为擦净设备受损。
2.1.1 光感防撞系统的硬件设计
擦净设备防撞系统的传感器由于擦净设备工作时运动幅度大并且离车体距离有比较近,普通的电容电感式传感器根本无法达到设计碰撞报警作用,所以最终选择了光电对射式传感器,对射传感器好处是灵敏度高,而且符合设计原理[3],但市场中的光电对射传感器直接安装后由于工作环境及安装位置的原因造成误报警,经分析在擦净设备运动动时滚轮会阻挡对射传感器的光源传播以及在清擦车身时一些灰尘也会降低光线的传播,因而造成误报警。将光电对射式传感器的发射与接收端用胶皮包裹到达防尘防干扰的效果,在将此组合体安装在擦净设备滚轮四周,在其清擦车身过程中,如果与车体发生碰撞时,滚轮四周用来包裹光电对射式传感器胶皮势必会因挤压变形,从而阻挡内部光线传播达到改变光电对射传感器信号改变的效果,再通过西门子可编程序控制器内部设定好的安全程序是机器人第一时间停车,起到保护车身的效果。
2.2 位置同步检测系统
2.2.1 位置同步检测系统的系统组成及原理
光感防撞系统仅用于擦净机器人对车身擦净时的检测,其覆盖范围总体不够全面。车身滑移导致编码器计算的理论位置和实际位置差异是碰撞发生的主要原因,所以设计一套位置同步检测系统配合此套系统使用,用于车身在行进过程中的同步检测,由三个电感式传感器及西门子远程输入输出模块、西门子可编程序控制器组成。
当车身进入擦净站内时,承载车身的滑撬触发传感器,此时车身继续前进,由西门子可编程序控制器(以下简称CPU-300)软件编写的程序开始运行计算并在特定位置与程序内预设数据(预设数据为车身正常进入擦净站内监控百余次计算的平均值)進行对比,其报警精度为30mm,如果车身非正常进入或者进入过程中发生位置偏移都会在特定位置与预设数据进行对比,一旦超出范围就会报警并且使站内所有机器人及设备进入到停止状态,同时记录报警时的车身错误距离以便分析错误原因,这样就避免设备辊轮与车身发生碰撞,达到保护车身的目的。
2.2.2 位置同步检测系统的硬件设计
位置同步检测系统是在现场擦净站内的辊床上选取三个关键点,在三个关键点处安装传感器用于检测以及比对车体距离,每个关键点的选取都是根据擦净设备的仿形决定,因为这套系统的主要作用就是避免擦净设备与车身发生碰撞,所以选取关键点时,就要基于仿形特征去选取,而这三个关键点最主要的特征就是在关键点之前即使车身发生了位置偏移,设备的运行轨迹也不会与车身发生碰撞,检测传感器的位置选取与设备的仿形设计就要达到高度契合、相辅相成。从而达到监控车身距离避免碰撞的效果。
2.2.3 位置同步检测系统的软件设计
位置同步检测系统软件采用模块化设计,方便扩展移植调用[4]。采用PLC中的STL语言编程。主要有主程序、车身距离检测比对子程序、FC7报警中断程序、错误数据记录子程序。
PLC主程序程序主要用于计算运动擦净过程中的输送距离,由输送电机安装编码器通过线缆传送,在经过高速脉冲计数器最终通过西门子远程输入输出模拟量模块给至CPU-300经过自主编写的程序运算得出车身实际的距离以供机器人进行跟踪。
距离对比子程序主要是根据现场安装的三个关键点传感器进行车身的实时定位以及计算比对,在人为的算出千台车在关键点传感器的距离,然后将此数据填写至此程序的管脚,从而达到车身距离一旦出现异常程序可以及时发现,并等待下一步处理。
FC7报警中断程序主要是将距离检测出的异常结果进行进一步的判断,如果距离检测判断为异常的结果,报警中断程序就会给擦净设备一个停止信号,来使擦净设备进入停机状态避免与车体发生碰撞。
错误数据记录程序是基于车身距离检测程序进而演化出来的,主要针对车身异常距离的后续措施,目的是记录错误距离然后有利于故障的解决。
3 实现测试分析
本系统安装完成以后,对相关设备进行检测。为了达到防碰撞最佳效果就必须考虑安全防撞光栅的灵敏度、位置同步检测传感器是否存在误差以及程序的正确性。因此需要做出一下实验分析。
(1)将防撞光栅安置完毕后(确定接收端和发射端相对,并能接收光线),用手遮住一端查看传感器还是否能接受到信号。确定光栅没问题后再将胶皮套上,用力使胶皮发生形变,在查看传感器是否能接受到信号。若不能,调整光栅位置,反复测试达到预期效果。
(2)安置好三个位置同步检测传感器后,手动将车身移动到传感器处,查看车身位置显示数据和设置传感器位置数据是否在误差范围内,在通过多次的测量和计算,通过编程软件对数据进行矫正处理。
(3)确定好硬件设备都已经安装无误,在通过人为的方式来触发报警,观察软件程序能否及时相应并停止报出警告。
经以上实验测试,可分析出此系统在生产过程中能否起到对设备以及车身的保护功能消除碰撞带来的损失。
4 结语
本文讨论并最终实现的追踪式擦净设备防撞保护系统,利用编码器计算车体理论移动位置,与实际进行比对自动判定其碰撞概率并给出警告,利用光电传感器检测设备与车身之间距离,距离过小时及时停止系统运行。有效避免追踪式擦净设备与汽车车身之间碰撞,从而避免由此产生的车身质量问题或报废成本。经过反复的测试和验证,此系统已经完全规避掉自动化生产中设备与车身发生碰撞的问题。通过防碰撞系统的设计和实现介绍,可供读者在设计各类防撞保护系统是作为参考。目前智能化工厂普及程度越来越高,此类防碰撞系统的市场请前景十分广阔。
参考文献:
[1]李思远,张程皓,姚世琪,等.基于机器人应用的自动擦净设备研发集成[J].现代涂料与涂装,2017(5).
[2]曾辉,孙承羲,张国忠.智能化、柔性化的鸵鸟毛自动擦净机[J].汽车制造业,2006.
[3]李靖宇.激光对射式光电传感器实现定位车快速精确定位[J]. 水运工程,2015,04(4):50-50.
[4]赵中敏,张秋云,杨广才.PLC控制系统设计[J].机床电器,2007,34(002):37-40.
