遥感卫星智能操控技术发展研究
2021-08-22刘晓敏孙进张帅李晗
刘晓敏 孙进 张帅 李晗
(北京空间飞行器总体设计部,北京 100094)
随着遥感卫星数量的快速增长和遥感信息获取 能力的不断提升,传统卫星操控模式开始显现出其对卫星应用效能的制约。同时,用户对遥感卫星的要求越来越高,既要求遥感信息获取的准确性和时效性,同时也要求有良好的交互体验。这就对遥感卫星的操控能力提出了更高的要求,因此,必须通过发展卫星智能操控技术来降低卫星操控难度和复杂度,以提高操控便捷性和信息处理效率,有效提升卫星的应用效能。
遥感卫星的智能操控涉及到多领域多学科技术,包括智能信息处理、智能故障诊断以及智能人机交互等,具有问题条件复杂和目标需求多样的特点。国内外相关领域研究者针对智能操控技术开展了大量研究,涉及到遥感卫星操控多个关键环节,如卫星自主任务规划、多星任务协同、星载数据处理以及地面智能操控等各个方面。目前,国外发达国家已实现了自主任务规划、星座规划以及在轨数据处理能力星载验证,而国内遥感卫星主要还是靠上注指令进行操控,数据处理仍以地面为主,智能化操控研究相对滞后,尚需深入研究。
本文首先论述遥感卫星操控技术的国内外发展现状,并对智能星地操控中涉及到的关键技术进行分析。在此基础上,结合遥感卫星操控当前存在的问题和未来应用需求,提出了天地一体化智能操控模式设计构想,为我国遥感卫星智能操控模式设计和系统实现提供参考。
1 遥感卫星智能操控技术的发展现状
1.1 国外发展现状
自20世纪90年代以来,世界各主要航天机构在智能卫星和卫星智能操控方面开展了大量研究,利用人工智能技术,在卫星智能规划与决策、自主运行及管理等方面全面提升卫星操控的智能化和卫星使用效能[1]。
NASA 于2003年研制了自主科学航天器试验系统(Autonomous Spacecraft Experiment,ASE)[2],在地球观测1 号(EO-1)和技术卫星-21(TechSat-21)[3]中对遥感图像在线判读,观测任务自主规划完成了在轨验证,能够在线完成遥感图像识别处理,并根据观测的事件对任务进行重规划,从而在下一个观测周期中自动瞄准感兴趣的观测目标。2009年,美国发射的战术星-3(TacSat-3)卫星,除了提供先期战场信息准备和“战斗-毁伤-评估”信息外,同时支持目标探测和自动识别及自主定位。卫星能够搜集和处理图像并通过已建立的通用数据链路和战场超高频装置下传资料文件、信息位置或完整的图像,具有一定智能性[4]。
在地面操控方面,2000年美国喷气推进实验室(JPL)人工智能团队开发的地面自动规划与调度系统(Automated Planning/Scheduling Environment,ASPEN)[5],采用自主计划/调度技术,通过自动生成一组命令序列将用户(例如科学家)提出的高级任务目标自动转换为航天器系统能够识别的可执行命令,可以显著降低运营成本并增加航天器的自主性。同时,ASPEN 建立了更加简洁的“地面-航天器”任务接口,一方面大幅减少了航天器地面操作人员的工作量,另一方面也使用户(例如科学家)可以直接操作航天器。2010年,美国Orbit Logic公司开发了面向多星协同任务的联合任务规划系统(Collection Planning&Analysis Workstation,CPAW),采用了一系列仿真模型来预测环境信息、航天器子系统、任务目标的变化情况,可以根据任务需求直接生成用于卫星操控的指令序列,已成功用于对多个卫星生产商的多型卫星的任务规划问题。另外,2012年美国国防先进研究计划局(DARPA)启动了“太空使能的军事作战效能”(Space Enabled Effects for Military Engagements,SEEME)项目,允许用户通过手持终端提交侦察请求,系统在获取需求后即可对目标区域进行成像并将数据“实传”到用户终端,该项目除了要求卫星具有较强的星地链路外对卫星的自主性、智能性也提出了很高的要求,尤其是卫星的自主规划能力和多星协同能力。
在ESA2009 年的星载自主计划系统(Project for On-Board Autonomy,PROBA)中,卫星可根据面向目标的观测请求(如一个观测请求包括目标位置和观测持续时间),将观测请求转变为一个活动调度、资源管理决策和卫星指向的命令[6]。法国航天局(CNES)2010年开发的自主通用体系结构演示验证试验平台(Autonomy Generic Architecture-Test and Application,AGATA)[7],致力于发展航天器在规划、监督和诊断等方面的星上自主能力,在其昂宿星(Pleiades)卫星上开展了相关试验,并设计了融合启发式规则和随机迭代功能的“贪心”搜索算法,解决卫星星座任务规划问题[8]。德国航空航天中心(DLR)2014年进行的星载自主任务规划试验(Verification of Autonomous Mission Planning Onboard a Spacecraft,VAMOS)包括星上和地面组件两大部分,地面组件通过整理不同用户的需求和预测的资源与环境状态,给出全局任务规划方案,并将其上注卫星。星上根据观测反馈结果与环境、资源的变化情况,可实时调整星上实际资源使用情况,以保证星上重规划方案的可行性。意大利航天局(ASI)2013年也提出了复杂开放结构空间任务执行系统(Comprehensive Open-architecture Space Mission Operations System,COSMOS)[9],进行多卫星组成的星座任务规划,以及监测与控制任务,通过可重构设计,该系统可快速适应新的卫星结构并重新组合。
韩国航空航天研究所(KARI)2006 年开发了一套卫星智能运行管理系统(OMS)[10]。该系统提供了一个操控平台,任务计划人员可以向任务管理系统上的飞行运行经理请求任务指挥批准,也可以使用运行文档管理功能让实时操作员报告异常事件,系统已在多用途卫星(KOMPSAT-2、-3和-5)上进行了应用验证。日本宇宙航空研究开发机构(JAXA)2014年提出了一种遥感卫星自动运行系统[11],并以小型科学卫星瑞美号的地面站为试验台,对自动运行系统进行了验证。具备包括数据链路自动操作、卫星远程操作等能力,远程操作系统可在移动设备中实现,例如平板电脑或智能手机以及个人电脑。
从上述发展概况可以看出,国外航天机构在卫星智能操控方面开展了全面的研究,取得了大量成果,涵盖单星自主任务规划、星上环境自主感知与任务动态规划、多星协同规划、星载智能实时处理、航天器终端操控等应用方向,并在多卫星系统进行了在轨验证,已逐步形成了型号应用能力。系统研制方面,主要通过星地一体联合任务规划形式来发挥地面资源丰富、星上实时性强的优势,另外,单星自主任务规划系统与多星协同任务规划系统并行开展、互为支撑;体系研究方面,国外自主任务规划技术与自主感知、自主决策、自主故障诊断等航天器自主技术协同发展,正逐步形成从自主感知、自主决策、自主规划到自主执行的航天器自主体系架构;地面操控方面,则致力于建立简洁的“地面-航天器”任务接口,一方面大幅减少了航天器地面操作人员的工作量,并发展智能终端操控,提升用户操控和信息获取的便捷性。
1.2 国内发展现状
目前,我国遥感卫星任务管理模式还是基于“天地大回路”的传统地面管控方式,大多通过“任务规划+指令生成和上注”的模式实现在轨控制[12],遥感数据处理也以地面为主。用户任务操作采用“需求-筹划-管控-卫星-处理-用户”的闭环链路,流程冗余,任务反应能力弱,无法充分发挥卫星应用效能,且星地操控复杂度高。为此,国内相关领域研究人员在遥感卫星操控智能化方向开展了相关研究,包括操控模式、智能卫星系统、地面运控系统与处理平台等几个方面。
在操控模式方面,2016年北京空间飞行器总体设计部田志新提出了基于智能星载电子系统的天地一体化运控方案[13],在星载电子系统自主指令生成、成像参数计算、任务规划优化、敏捷姿态规划的支持下,实现了从静态任务规划到动态任务规划转变,从专用操控模式向通用操控模式转变,从星地开环管理向星地闭环管理转变。2019年北京空间飞行器总体设计部刘云鹤等提出了基于“人在回路”的静轨遥感卫星智能操控方案[14],采用面向任务和用户操控的总体架构,通过最优任务规划、指令自主生成、参数智能匹配、星载信息处理、星地信息交互等多项星地一体化设计,提升卫星操控的灵活性。通过引入“人机接口”控制卫星任务执行的进程并引入判断与创新,使卫星用户能够便捷的监控卫星任务执行的全进程,再根据卫星反馈后的图像信息作为输入更快的重建目标任务。
在智能遥感卫星系统研制方面,2017年我国首颗商业遥感卫星吉林一号发射入轨,具有一定的星上图像处理能力,并实现了机动路径的自主规划[15]。2019年发射了我国第一颗软件定义卫星天智一号,可在轨完成卫星所获的大部分数据处理,如智能目标检测识别、智能云判读、基于强化学习的智能姿态控制等,并根据需要下传地面[16];同时,卫星为开放型系统,所有人都可以为卫星开发软件,并可根据一定流程将开发的软件或是地面训练好的神经网络模型上注卫星,以提高卫星在轨实时处理能力或开展在轨实验。对于卫星的实时状态,所有人都可以通过手机利用APP访问查询,并指挥卫星在轨实时执行“在轨自拍”等空间任务。另外,国内主要航天科研机构和高校围绕智能遥感卫星系统也组织了许多相关项目研究,如微小卫星智能网络、地球观测智慧系统等。
在地面系统平台方面,2016 年国防科学技术大学陈英武等提出了一种敏捷成像卫星自主运控系统[17],成像卫星配备有星载重规划分系统和实时任务的接收器,实时任务的接收器用于成像卫星与用户、成像卫星与地面支持系统进行实时短报文信息交互,星载重规划分系统主要实现系统中所有观测任务的在线任务规划功能,可自主生成任务规划方案并结合卫星指令模板生成卫星指令。刘继东等创建了基于数字地球的“空天大数据承载与智能服务平台”[18],将空天大数据、云计算与人工智能技术深入融合,提高了遥感数据处理能力和智能化水平。
从国内研究概况可以看出,当前国内遥感卫星领域的智能化研究还处于初步阶段,工程实践应用尚不足。操控模式方面,目前研究仅关注遥感卫星的在轨操控环节,未涉及信息处理、在轨诊断等关键问题,也未从整体上对智能操控总体架构进行设计研究,尚不能支持全面的自动化操控;系统研制方面,自主任务规划系统和星载智能处理能力仅有少量初步验证,处于地面系统使用向星载验证的过渡阶段,尚无成熟应用经验;地面系统方面,任务处理平台和终端操控智能化研究匮乏,尚未形成通用便捷的卫星操控平台,且对智能人机交互研究不多,智能化程度不足,无法支撑面向终端用户的航天器智能操控应用。
2 智能星地操控关键技术分析
从上述发展现状可以看出,目前国内外相关机构在智能星地操控方面的研究焦点主要集中在卫星自主任务规划、多星任务协同、星载智能处理以及地面智能操控与信息处理等几个方面。
1)卫星自主任务规划
传统的卫星任务规划由地面依据预设条件制定任务方案,但这种模式依赖于稳定的运行环境和充裕的星地通信时间,伴随着高昂的星地沟通成本。自主任务规划可大大降低对地面管控的依赖,减少复杂功能卫星任务上注数据量,显著缩短从任务提出至航天器执行的过程、提高突发事件的自主响应能力、提升复杂任务的自主执行能力、更好的发挥航天器应用效能,是实现遥感卫星智能操控的首要关键技术。
卫星自主任务规划所面临的最大问题是星上计算和存储资源受限,当前主要研究资源约束下的自主任务规划问题建模与优化求解问题。目前,国外卫星自主任务规划技术已经在多领域具备了工程化应用能力,但国内研究尚处于地面系统使用向星载验证的过渡阶段,需将自主任务规划技术与人工智能发展紧密结合,研究智能规划算法。另外,目前现有研究主要集中于模型和算法领域,并没有具体给出完整的基于实际卫星情景的建模流程和验证,也缺乏系统的流程和框架的设计,尚需进一步系统性的深入研究。
2)多星任务协同
随着航天活动日益开展深入,用户对观测任务实时性、观测空间延展性、观测对象动态性等方面提出了更严苛和复杂的要求,受卫星所处轨道、星载遥感器资源特征、观测目标物理特征等影响,单一卫星难以满足日趋复杂的观测需求,而多星自主任务规划具有更强大的观测能力和优势。
相对于单星情况,多星的任务规划由于目标数目和种类的丰富、卫星数目和载荷种类的丰富,问题建模的复杂度和问题求解的计算规模都有了巨大的增长。这也致使在星载计算机有限的计算能力下,所有基于遍历搜索得到全局最优解的方法在星上都难以被采用。目前,国外已经在多个领域开展了多星自主任务规划技术的星载验证[19],但国内关于多星自主任务规划的研究较为匮乏,且没有明确卫星体系之中各个卫星的角色和完整的基于资源特征和时间窗特征的任务分配机制,使得多颗卫星难以实现高效和快速的任务分配,需进一步深入研究。
3)星载智能实时处理
随着遥感数据量的迅猛增长以及用户对信息获取时效性和有效性要求的提高,必须利用星载智能实时处理技术缩短系统反应时间、突破数传瓶颈,并提高载荷利用率。遥感信息星载智能处理通过在星上完成无效数据剔除、感兴趣区域提取、关键目标检测等,可以生产出具有更高附加值的产品,尽量减少回传的数据量,又能够极大地提高应用的时效性。
随着人工智能技术的发展,尤其是深度学习等优秀算法的涌现,星载智能处理方法已发生重大改变。目前主要的方法是借鉴注意力机制[20]在人类视觉系统中的选择性感知特点,结合自底向上的视觉显著性引导及自顶向下的显著区域解释,进行大视场遥感目标检测,需要关注的是如何进行星载计算资源的合理分配,以实现实时遥感与信息处理的并行进行。
4)地面智能操控
遥感卫星地面操控涉及用户操控卫星的操控接口和操控界面,直接影响用户对卫星的智能操控体验,主要包括任务运控、遥感信息处理以及健康监测与故障诊断三部分。
任务运控是结合现有卫星系统资源,面向待执行任务提出的符合各种限制条件的最大化卫星系统资源效益的任务执行序列,涉及从用户提出需求,到卫星指令和地面接收计划的生成全过程。目前,以ESA 和NASA 为代表的卫星地面运控系统,其特点是体系结构标准化,信息互通、应用互操作,具有统一的组织来协调处理系统的标准规范制定和研制管理[21]。而国内的卫星运控系统观测任务调度与执行彼此独立运行,在业务层面由协商讨论、手工计划等手段实现各部门的协同数据获取。因此,基于微服务的分布式、可扩展的地面运控系统已经成为发展趋势,系统对于新增卫星的兼容性更好,扩展性更强,开发成本更加低廉。对于任务操作,国内遥感卫星多采用基于指令模板或宏指令的运控体制,用户编制指令和操控难度和复杂度高。因此,构建面向用户的好用易用的智能运控系统,以提升操作便捷性和用户体验,逐步受到相关领域研究者的关注。
地面遥感信息处理主要是负责接收卫星遥感数据,进行图像预处理和图像应用处理,生成不同等级和不同类型的图像产品,并对卫星遥感图像进行判读、解释和评估等。随着在轨遥感卫星数量的快速增加,遥感图像的数据量也呈几何级数增长,同时受卫星振动、电磁干扰等的影响遥感图像质量也难以保证,基于图像特征提取、辐射/几何校正等传统预处理手段已经不能满足要求。因此,可研究结合卫星运动参数特性,采用全连接神经网络对振动和干扰点进行估计,改善图像质量,同时采用深度学习理论对遥感图像进行电磁干扰和图像畸变检测,进一步提高图像复原的鲁棒性和准确性[22]。对于特定目标检测,传统的检测方法包括基于形状先验特征的目标检测、梯度直方图、支持向量机等,在用于复杂背景、动态环境下的遥感目标检测时效果并不理想,而基于深度学习的方法由于采用深度神经网络可以提取多层次特征,其特征表达能力强,适合于遥感图像目标检测。进一步的,还可以融合视觉注意力机制,选择感兴趣区域进行详细分析,提升目标检测精度,降低时间和空间复杂度。另外,由于现有的遥感图像处理工具大多针对不同研究人员进行算法研究进行设计,不利于进行图像处理流程可视化及处理结果的现场展示和交互,需基于人工智能和人机交互技术,进一步实现任务结果的多维度呈现和用户便捷的交互体验。
在健康监测与故障诊断环节,遥感卫星由于遥测数据量大、判读复杂度高,难以满足用户对于卫星健康状态感知、故障诊断的直观性和快速性要求,且应急故障响应和处置能力不足。因此,需进一步深入研究健康监测与故障诊断技术,基于卫星自主健康评估技术,通过星地联合对卫星运行状态和故障进行智能化处理,提升卫星健康管理可视化、降低卫星健康状态感知复杂度,实现智能化卫星故障处置响应。
3 天地一体化智能操控模式设计构想
3.1 天地一体化智能星地操控总体框架
结合国内外遥感卫星智能星地操控研究现状及未来我国遥感卫星应用需求,为提升用户操作的便捷性和智能化,采用天地一体化的设计思路,构建“智能卫星+一体化地面系统+智能操控平台”的总体架构,通过高、中、低轨卫星多星协同、单星智能、星地联合处理以及星地操控各环节的天地一体化设计和协调应用,形成遥感卫星智能化操控新模式。总体框架如图1所示。

图1 天地一体化智能星地操控总体框架Fig.1 Overall architecture of the space-ground-integration and intelligent satellite-ground manipulation
在体系方面,从快捷任务指控、任务信息获取、智能健康监测等各环节全面优化星地操控设计。一方面,卫星自主任务规划技术与星载实时处理、自主故障诊断等协同发展,从而串联起遥感卫星自主感知、自主决策、自主故障诊断等自主技术,形成从自主感知、自主决策、自主规划到自主执行的自主体系架构,提升航天器智能自主能力;另一方面,地面系统充分利用人工智能和人机交互技术,构建一体化地面系统和智能操控平台,提升操控便捷性和用户体验,实现终端快捷任务指控、任务结果智能处理与多维呈现,以及智能健康监测与故障处置等。
在智能算法方面,将人工智能技术与自主任务规划技术、遥感图像在轨处理技术、故障诊断技术紧密结合,深入研究单星及多星智能规划算法、智能实时处理及故障诊断算法,提升星、地智能化处理水平。
3.2 天地一体化智能星地操控接口和操控流程
基于天地一体化智能操控总体框架,根据遥感卫星星地操控业务内容,将星地操控划分为:任务指控、任务进程监控、任务结果处理与多维度呈现、在轨维护、在轨健康监测与处置等5个维度,通过5个维度的天地一体化设计,全面优化星地操控接口和操控流程,并改善人机交互效果,提升卫星的好用易用性。具体操控接口和流程如图2所示。

图2 天地一体化智能星地操控接口和流程Fig.2 Interface and process of the space-ground-integration and intelligent satellite-ground manipulation
1)智能化任务指控接口和流程
为提升遥感卫星任务指控效率和便捷性,采用多模态[23]任务指令输入方式,实现任务参数高效注入,并结合地面系统任务统筹和卫星自主任务规划,实现“一键式”任务上注,并自动完成任务合法性检验,满足用户高效、可靠、快捷的任务指控要求。
用户通过操控平台完成多模态任务指令输入,任务指令输入形式可包括参数、文本、语音、可视化地图界面等多种模态,目标类型可包含点目标、线目标、区域目标或多个目标等。地面系统接收操控平台模态检测与信息识别处理后的统一格式数据帧,完成多用户多任务智能调度、任务规划和任务数据生成,并将任务数据上注给卫星,实现用户只需要输入目标地理位置信息和成像时间等简单参数即可完成任务指控。地面上注的指令数据包括两类:一类是地面任务规划后的指令数据,由卫星接收指令直接执行完成任务操控;另一类是任务指令数据,由卫星自主完成任务分解、自主任务规划、在轨指令序列生成和自主任务操控。具体任务指控过程如图3所示。

图3 智能化任务指控过程Fig.3 Process of the intelligent task command and control
2)任务进程智能监控接口和流程
通过星地联合对卫星工作状态的智能化处理,实现卫星执行任务的全局动态监控和单个任务进程的实时监控,以满足用户对任务执行过程的实时监控需求。
智能卫星下发卫星任务相关信息,对于卫星已规划待执行任务,可基于卫星在线任务规划结果获取遥感任务计划,包括规划路径、预计执行时段、卫星姿态等信息;对于正执行任务,可获取任务规划路径、实时卫星姿态、实时视频图像数据、跟踪目标位置及特征信息、可疑目标的告警等信息。当有应急任务插入时,卫星可生成相应的事件报告,供地面分析处理。
地面系统接收任务信息,完成任务状态遥测处理,包括遥测数据融合与分析、事件报告处理及数据可视化等,并完成任务综合状态统计与分析。最后,通过各操控平台实现相关任务的进程监控及状态直观呈现,包括卫星相关工作模式、任务执行进程、数据传输与回放进程等。
3)任务结果处理与多维度呈现接口和流程
任务结果通过智能卫星完成星上数据智能处理及分发,地面系统对卫星处理结果和原始图像数据进行进一步的智能化处理,实现任务结果的多维度交互式呈现,满足用户对整体态势全方位的直观感知需求和时效性获取要求。
地面系统接收星上智能处理结果和原始图像数据两类任务结果数据,在完成精细图像处理、目标检测与识别等处理后,将两类任务结果数据采用图像增强、实时视频显示、三维重建及场景融合等技术手段完成面向用户的任务结果多维度直观呈现,实现用户对遥感目标态势全方位的直观信息感知。用户收到任务结果后,根据实际任务需求还可通过“一键式”操作将自动跟踪、目标详查等指令发送给任务指控环节,通过任务指控将跟踪、星间协同等任务发送至卫星,或将信息数据分发至各地面用户终端。具体功能模块设计和工作过程如图4所示。

图4 任务结果处理与多维度呈现过程Fig.4 Process of task result processing and multidimensional presentation
4)智能化在轨维护接口和流程
受限于卫星计算资源和能耗,卫星在轨自主维护一般只针对实时性要求高、对任务完成质量起决定作用的部分参数进行,大量的目标库、参数库、算法库及相关参数优化均需要通过地面系统实现,然后再通过地面上注的方式传输给卫星。因此,需建立卫星在轨和地面的联合智能处理机制,即星上进行高层次信息融合,地面基于人工智能技术进行海量数据的机器学习过程,建立完善星地知识库、模型库、信息源资源库等,将在轨和地面的信息进行可控信息量的交互,从而形成星上和地面处理的有机整体,支持卫星在轨动态能力提升。
智能卫星设置目标库、任务库、历史任务规划结果库、算法库以及目标检测识别模型库等,地面系统基于深度学习框架,与卫星同步建立各知识库和模型框架,并通过历史任务数据进行样本训练和模型优化。用户可通过操控平台查看星上当前各知识库、算法库以及模型库的参数信息,根据遥感任务需求和卫星在轨维护要求,可通过“一键式”操作由地面系统自主完成各知识库、算法库的数据组包、正确性及安全性验证和自动上注,实现星上各知识库和算法库的“一键式”管理、升级和维护。
5)在轨健康监测与处置接口和流程
结合智能卫星自主健康管理技术及地面健康管控,通过星地联合对卫星运行状态和故障进行智能化处理,提升卫星健康管理可视化、降低卫星健康状态感知复杂度,实现智能化卫星故障处置响应。地面系统实时获取卫星遥测数据进行复杂遥测解析、处理和卫星实时健康监测,通过数据融合、数据简化和可视化处理等手段,实现卫星健康状态的直观呈现,降低用户对卫星健康状态感知的复杂度,并完成卫星健康状态诊断。
当卫星发生异常事件时,地面处理可通过两种途径:一种是地面通过复杂遥测数据分析进行故障识别;另一种是卫星自主将故障数据包(或紧急故障代码)发送至地面。地面系统根据地面复杂遥测分析结果或卫星下传的故障数据包,与已建立的故障诊断模型和诊断知识库进行模式匹配,自动获得故障信息及应急处理建议,用户只需通过“一键式”操作即可将故障处置指令数据包上注至卫星,实现卫星智能化的快速故障处置响应。具体工作过程如图5所示。

图5 在轨健康监测与处置过程Fig.5 Process of on-orbit health monitoring and disposal
3.3 与现有操控模式对比分析
将该模式与目前国内遥感卫星操控模式进行对比,见表1。可以看出,该模式可实现遥感卫星各操控环节的“一键式”智能星地交互,有效提升卫星好用易用性,实现用户对卫星的便捷操控和智能交互。
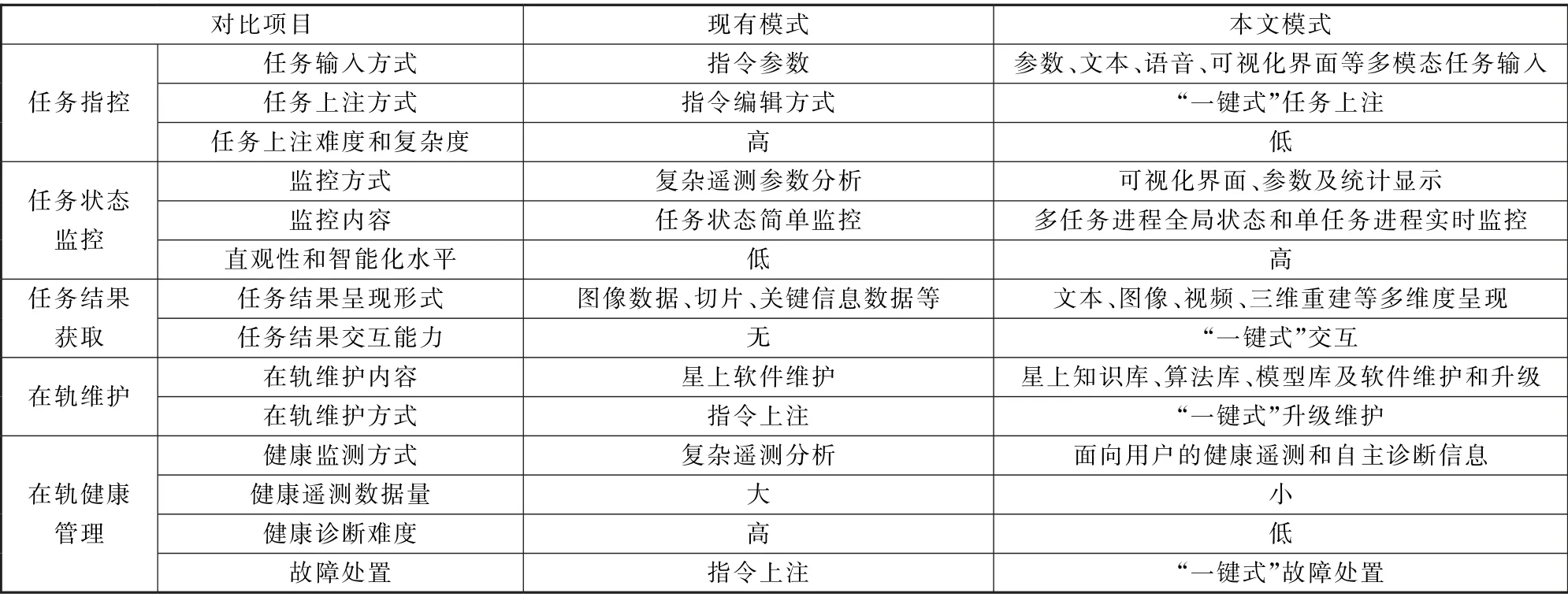
表1 与现有操控模式对比分析Table 1 Comparison with existing manipulating mode
4 结束语
本文针对当前遥感卫星智能化操控需求,综合研究了国内外遥感卫星操控技术研究现状及存在的问题,基于“天地一体化”设计思路构建了“智能卫星+一体化地面系统+智能操控平台”的3层总体架构、智能操控流程及模块间接口,并对智能化任务指控、任务进程智能监控、任务结果处理与多维度呈现、智能化在轨维护、在轨健康监测与处置等关键环节进行了分析。通过与现有操控模式的定性比较,结果显示该模式可以有效提升卫星的好用易用性,实现用户对卫星的便捷操控和智能交互。下一步将根据所提出的设计模式,进行“天地一体化”操控系统的详细设计与实现,以完成遥感卫星各操控环节的“一键式”星地交互。
