ADAMS环境下多关节型双足步行机器人步态仿真与结果分析*
2021-08-20陈娜,卢威
陈 娜,卢 威
(张家界航空职业技术学院,湖南 张家界 427000)
多关节型双足步行机器人比其他足式机器人具有更高的灵活性,更加适合与人类协同工作,例如在危险环境作业、不平整地面货物搬运、医疗护理康复等方面。双足步行机器人的步行能力很大程度上取决于下肢机构的运动学和动力学特征,本研究的双足步行机器人在下肢行走机构采用多个关节与连杆串联,满足前后行、侧行、转弯、上下台阶、爬斜坡等步行功能的自由度要求。这种多关节双足运动由于存在自由度数目较多、无固定着力支撑点和多驱动的相互协调等问题,运动规划与自身的实际运动存在较大差异。本项目以如图1所示的物理样机为研究对象,利用ADAMS软件建立仿真模型,采用仿真曲线、三维效果相结合的思路,通过对物理样机和虚拟样机的对比实验,验证设计的可行性。

图1 物理样机
1 构建物理样机运动模型
为了使机构小巧而轻盈,本机构的各个部件采用铝合金(LY12)钣金材料(厚度1 mm)。本样机下肢模拟人体的大腿、小腿和脚,之间采用关节连接,各关节间使用伺服电机驱动,电机选用HG14-M型RC伺服电机,外形尺寸40 cm×19.8 cm×37.5 cm,左右两侧髋关节距离68 mm,大、小腿长度52 mm,髋侧向与前向关节轴距42 mm,踝侧向与前向关节轴距14 mm,各关节配置相应的旋转副,实现行走运动的协调动作,各关节运动范围如表1所示。
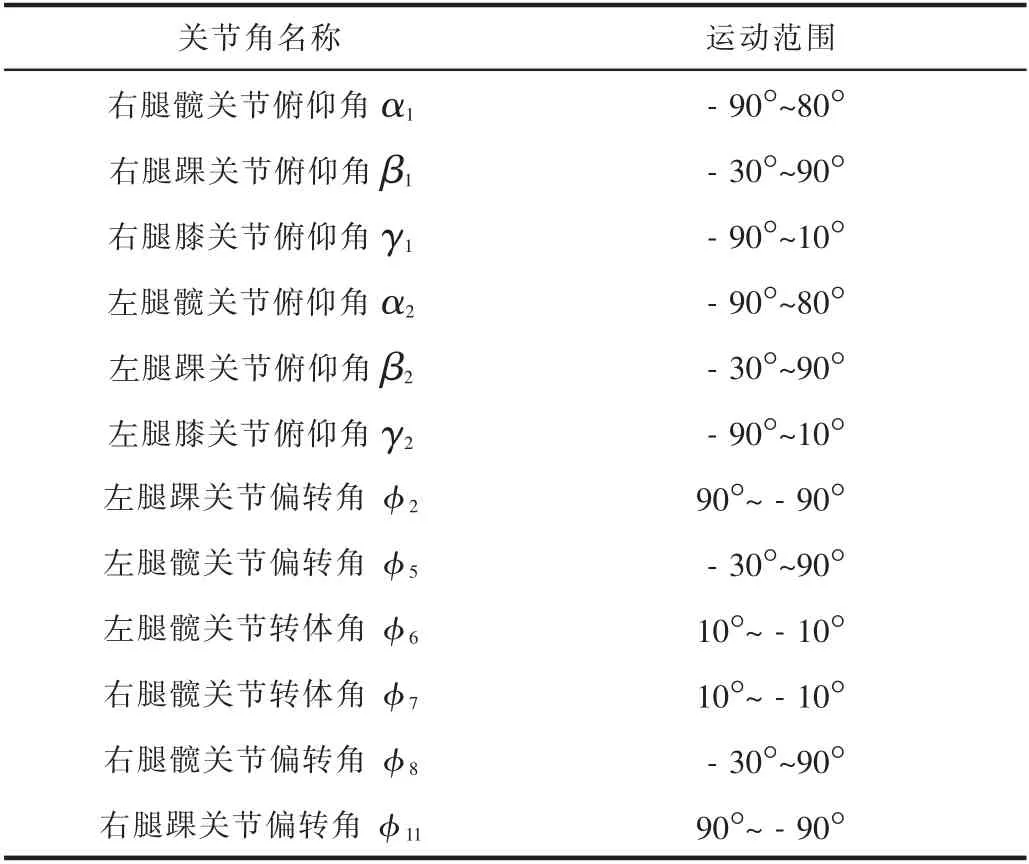
表1 各关节运动范围
本项目运用坐标转换法和H-D规则进行机构的运动学分析,建立运动学模型,将由机器人的左腿开始从下往上的杆件依次定义为1、2、3、4、5、6杆,右腿从上往下依次定义为杆件7~12,在各个杆件相连的关节处建立一个杆件坐标系,如图2所示。
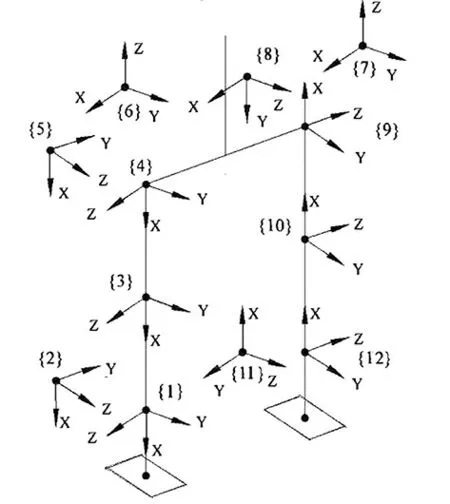
图2 运动学模型
由图2所示各连杆坐标系和表1所示关节角参数,可得到各坐标系的位姿矩阵:


若需要求出关节i的空间位置和姿态,只要确定第i个坐标系相对于参考坐标系{0}的齐次变换矩阵即可,即可以通过各齐次坐标变换阵的连乘来求得:

只要给定关节变量Φi,根据上式就可以求出末端执行器的空间位置和姿态。
2 步态规划与仿真
2.1 步态规划
步态是在步行运动过程中,机器人的各个关节在时间和位置上的一种协调关系,通常由各关节运动的一组时间轨迹来描述[1-10]。而所谓步态规划,就是设计步行机器人各关节角度的变化规律,使其能够实现一定条件下的步行性能。如图3所示,通过对人类步行过程的分析,将行走步态设计分为几个阶段:双腿支撑(如图3a所示);重心右移(先是右腿支撑),左腿抬起(如图3b所示);左腿放下,重心移到双腿中间(如图3c所示);重心左移,右腿抬起(如图3d所示);右腿放下,重心移到双腿间(如图3e所示)。

图3 步行过程模拟
本项目基于力学稳定性的前提条件,采用关节空间轨迹规划方法,由空间一系列离散的位置和姿态规划出一条函数曲线,由此曲线来描述双足和躯干的轨迹,若曲线连续、光滑,则说明规划步态流畅。为此,本项目应用ADAMS软件下五次插值函数Step5进行插值,具体插值结果如表2所示。

表2 步行过程中各关节角
2.2 模型建立和仿真
本项目通过测绘物理样机的结构尺寸,建立机器人行走机构的虚拟样机,采用参数化设计进行零部件造型和装配,提取出经常改动的几何参数,方便了后续三维模型的修改和优化;通过编辑各模块之间的关节角,便可设置仿真时各动作的初始状态;设置好客观外部环境参数后,便可对其展开动力学分析。
建立仿真模型时,各部件添加约束,连杆之间均为转动关节,仅需为每个关节配置一个旋转副即可,各关节运动副如表3所示。为了模拟真实的外部环境,需要给模型添加重力,同时由于双足步行机器人在地面行走,所以在机器人与地板相互约束的条件较为复杂,需要保证双足步行机器人与地面接触产生接触力,并且需要定义摩擦力。在虚拟模型中,为了机器人的顺利行走,要给定足够的摩擦力,保证机器人在行走中不会打滑。

表3 各关节运动副
将已经在UG环境下建立的三维模型导入到ADAMS中,经过编辑后的机器人运动仿真模型如图4所示。以右脚支撑、左脚向前迈步为例,其过程仿真截图如图5所示。
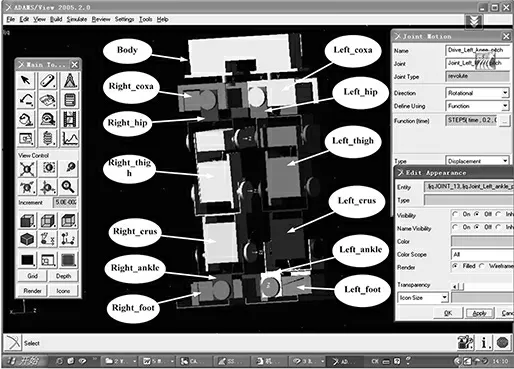
图4 运动仿真模型

图5 仿真动画
3 仿真与试验对比
3.1 仿真结果分析
仍以右脚支撑、左脚向前迈步为例,时间设置为5 s(包括起步1 s,连续步行3 s,停步1 s),步长设置为50 mm。调用ADAMS的后处理模块对各个关节的角位移进行仿真结果分析,并以曲线方式输出,如图6所示。
通过仿真过程中的截图可以看出,该双足步行机器人能够实现连续稳定的步行动作;每个关节的位移曲线图,可与表2所列出的步行时各关节角进行验证;通过观察曲线可以看到,规划的步态轨迹非常光滑,无突变现象,说明机器人基本能稳定行走。以上几点验证了步态规划的有效性和控制的可行性。



图6 各关节角位移曲线图
3.2 实验验证
为了校验双足机器人三维仿真的正确性,后期设计了相应的运动控制程序,输入物理样机进行现场对比实验,实验结果与仿真结果基本一致,说明本项目的机器人步态建模方法与行走仿真具有较强的工程实用性。
4 结语
1)为验证双足机器人步态三维仿真的可行性,依据物理样机的构型,利用坐标变换法和D-H规则,推导出双足机构正向运动的计算公式,以便进行步态控制的运动编程[11]。
2)为了能够实现在ADAMS中步态的连续仿真,本项目将机器人双足的步行分解为5个动作,每个动作不但能单独仿真,也能实现步态的连续仿真,这满足了不同情况下的仿真要求,也提高了仿真效率。
3)在UGNX三维软件环境中建立了双足机器人的运动仿真模型虚拟样机。通过各关节驱动副适当配置,以及机器人脚板与虚拟地面环境约束的正确设定,很好地解决了双足机器人运动中无固定支撑点的问题。
4)通过仿真结果与现场实验对比,说明采用ADAMS软件进行双足机器人步态的三维仿真是可行的,它能为物理样机的开发提供重要的仿真数据。
