倒立摆自适应模糊控制系统研究
2021-08-19王广文徐芷薇王丽
王广文 徐芷薇 王丽
(南京理工大学紫金学院,江苏南京 210000)
0 绪论
倒立摆系统作为一类经典受控对象,其广泛应用于控制理论的优化以及验证试验。目前为止,单级倒立摆的研究已经趋向于成熟,研究深度也较为客观,二级倒立摆模型的研究也在不断发展过程中[1]。目前,三级倒立摆模型的稳定性研究是控制理论界较流行的研究课题之一。1993年到1995年间很多学者陆续发表了大量对三级倒立摆系统的控制仿真结果与实物控制结果,但是其中所使用的控制理论知识都较为粗略,都只能称为模糊控制或近似推论,仿真结果也并没有那么精确如意[2]。从20世纪70年代起,由于控制理论的先进性以及发展趋势多元化性,像PID控制、LQR控制方法都是当时较为流行且仿真结果十分明显的典型控制算法[3-4]。
1 倒立摆数学模型的建立
单级倒立摆系统由沿导轨左右水平运动的小车以及采用转轴固定于小车顶部的单级摆杆组成[5]。摆杆假设为质量均匀的刚体;各摩擦力与相对速度成正比并忽略运动状态下的空气摩擦力。模型中字母所表示的参数如下:
小车质量:M;摆杆质量:m;小车所受外力:F;小车产生的位移:x;摆杆运动时与平衡状态所产生的夹角:θ。

单级倒立摆系统的运动方程转化成状态方程后,方程组解得关于和的方程组如下:

2 自适应模糊控制器的设计
设计思路主要是采用具有一般性的鲁棒自适应方法作为本文自适应模糊控制的自适应率[6],在此基础上采用了高斯函数作为模糊控制的隶属函数(MF),这样的自适应率更具有一般性,与文献[6]中的控制区别在于可以实现定点控制,但只能保证局部稳定。
高斯函数对每一个输入都有一组宽度相同中心不同的高斯函数,分布按照对应的输入的变化范围大致确定,比如对于θ角度这个输入,它的变化范围需要控制在一个很小的范围内,它超过某个值会导致系统奇异,控制失效,因此θ需要控制在0度附近,这个奇点是可以通过系统模型算出来的,只需保证θ的中心分布在这个范围内就可以了。通过调整MF的权重,可以将自适应模糊部分稳定地拟合不确定的系统动力学部分,其中鲁棒项保证了权重值不会无界漂移,但是代价就是控制的稳定精度会下降。
图1为本文所设计的自适应模糊控制器的封装形式。其中,Reference模块为参考输出值模块,单级倒立摆系统的实际位移参数和角度参数都需要与其预设参数值进行比对,以完成动态跟踪与误差输出;Controller模块为自适应模糊控制器模块,在此模块中可以实现对位移参数和角度参数的总体稳定控制与分别控制;IPS模块为倒立摆数学模型。
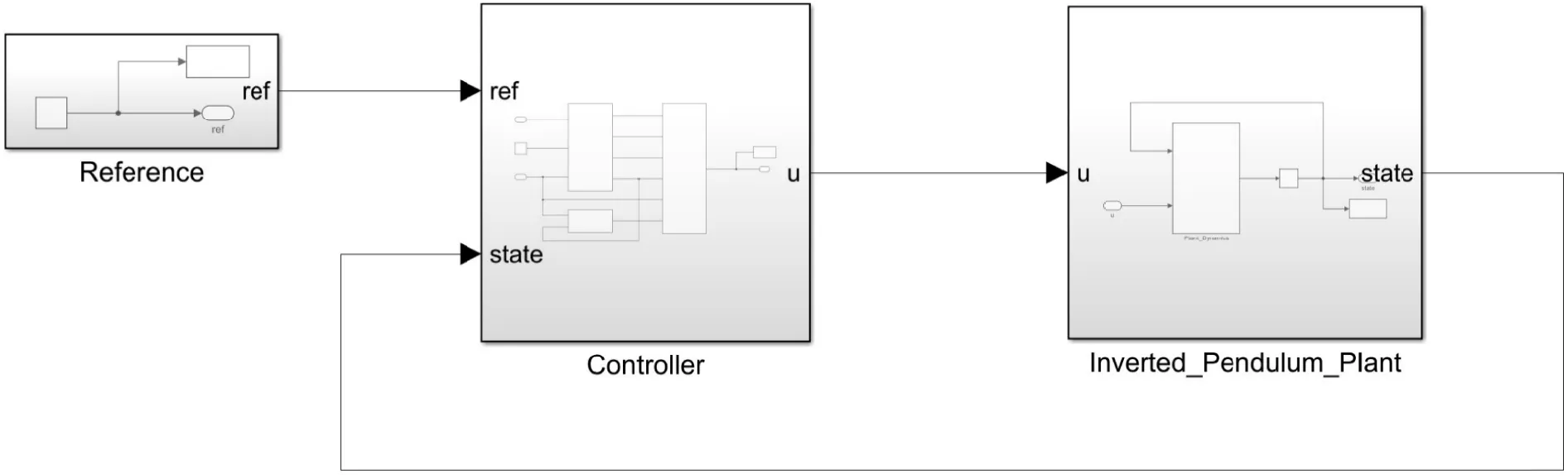
图1 自适应模糊控制器封装图Fig.1 Package diagram of adaptive fuzzy controller
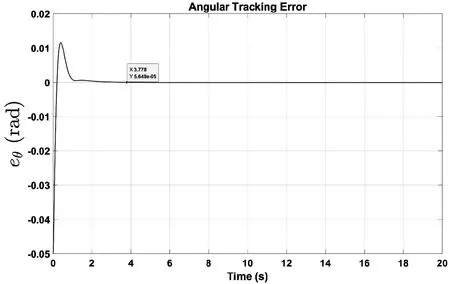
图3 角度追踪误差Fig.3 Angle tracking error
根据实际调试所使用的单机倒立摆各项参数值为M=0.04kg,m=0.085kg,l=0.25m,g=9.81m/s2。
3 系统稳定性研究
若采用第二章中设计的自适应模糊控制系统,且结合文献[6]中四个条件,则有以下两大假设:
(1)模糊逻辑所控制的输入参数都是有界的;
(2)跟踪误差趋向于0;
证明过程如下。

式中表示连续监督控制器的uS与eTPb表达相同,在这里假设g>0,则有eTPbguS≥0。于是有

根据所证明的结果可知uT、uS和uC皆有界,又因为,所以有下式

对两边式子分别积分得

综合上述结论,结合Barbalat引理(当e∊L2∩L∞且时,有可得结论:。得证。

图4 小车位移波动图Fig.4 Displacement fluctuation diagram of trolley
需要注意的是,本文所采用的自适应模糊控制方法达到的稳定是局部稳定而并非全局稳定,因此,本文的参数输入具有范围限制。
4 MATLAB仿真
本文仿真结果如图2-图5所示。
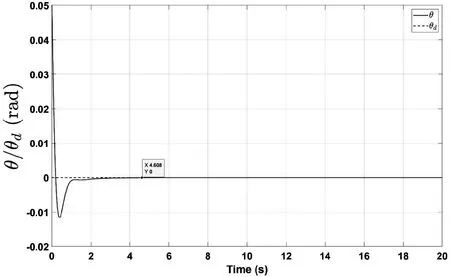
图2 摆杆角度波动图Fig.2 The swing angle of the swing rod

图5 位移追踪误差Fig.5 Displacement tracking error
从仿真结果可以看出,本自适应控制器完成了对单级倒立摆中摆杆的角度以及位移的稳定控制,且结果符合预期结果。摆杆角度从初试角度逐渐趋向于平衡位置,小车位移在给一个初始力的条件下趋向于静止。从对两个参数的误差值追踪可以看出,系统一直保持趋向于稳定趋势,并且对于不稳定的倒立摆系统稳定性控制基本在前五秒内就完成。
5 结论
从以上仿真结果可以看出,本文所采用的自适应模糊控制系统对单级倒立摆系统具有较优越的鲁棒项控制性能。针对倒立摆系统的两个不稳定变量位移和角度进行模糊控制,并对其进行跟踪误差计算与动态补偿控制,以此提高了系统的控制精度与鲁棒性。
