潮流发电系统的无源控制与输出功率优化
2021-08-18张巧杰
党 萌,张巧杰
(北京信息科技大学自动化学院,北京 100192)
海洋能是绿色可再生能源,随着化石能源的日益枯竭,它的开发利用愈发受到重视[1]。《中国海洋能2019 年度进展报告》指出自2010 年以来我国累计支持经费约13亿元,共支持114个项目。由此可见,海洋能的开发将成为中国未来新能源的重要领域。海洋能发电主要分为波浪发电、潮汐发电、盐差发电、海洋温差发电、潮流发电5大类。其中,潮流发电无需拦海筑坝,对生态环境影响较小,节约成本,且海水涨、落潮方向单一,易于控制,从而吸引了国内外大批学者的研究,但潮流发电输出功率较低的问题仍未得到有效解决。
潮流能具有波动性[2],因此其发电机输出电压范围较宽,发电功率波动较大,如何提高潮流能转化效率,获得较多的输出功率一直是潮流发电的核心问题。文献[3]提出了低通滤波及波电功率预测两种功率优化控制策略,取得了比较好的结果,但实验基于理想波浪条件,现实中波浪能波动较大,实际应用有待验证。文献[4]设计了以定子侧变频器最大风能跟踪为目标,借助电池储能装置调节输出功率的双功率控制系统,但并未考虑风能对叶轮获得转矩的波动,将影响发电机电磁力控制信号精确性。文献[5]建立了基于励磁电流分量和电磁力电流分量实现解耦控制的双自由度法,以提高潮流获取功率的方式达到发电机输出功率的优化,但该方案需要外界储能装置为发电机提供能量,导致成本较高,不利于后期维修。文献[6]建立了复合储能系统,采用嵌套粒子群算法对风电功率模型进行优化,但提高了储能系统投资成本,同时所提算法结构复杂,广泛应用度仍需提高。
本文基于6 kW水平轴双向叶轮直驱式潮流发电模型,提出了基于自适应无源控制策略对三相永磁同步发电机PMSG(permanent magnet synchro⁃nous generator)转子最佳速度的跟踪控制,实现潮流发电输出功率最大;仿真结果表明,在输入端潮流流速变化及输出端载荷变化时,系统能够输出较大的功率,且响应速度快,鲁棒性较强。
1 潮流发电系统模型
1.1 叶轮的效率分析
潮流系统模型如图1 所示。水轮机水平置于海水中,随潮流涌动旋转,双向叶轮可适应海水的往复性运动,假设潮流流速为v,则流经叶轮的潮流输入功率可表示为


图1 潮流发电系统模型Fig.1 Model of tidal current power generation system
1.2 叶轮最佳转速分析
叶轮获能效率是衡量潮流发电系统输出功率的主要标准。由式(3)可知,影响潮流能转化效率的主要因素为叶轮获得转矩M1、叶轮转速ω及潮流流速v,借助流体力学软件Fluent,可以分析叶轮在不同流速环境v和不同叶轮转速ω下,叶轮获得的转矩M1,从而分析潮流能获取效率。直驱式水轮机模型如图2所示。

图2 直驱式水轮机模型Fig.2 Model of direct drive hydraulic turbine
网格模型质量直接影响叶轮获得转矩精度,由于水轮机模型结构复杂,因此采用适合复杂形状的非结构网格,其中最小网格尺寸2.5 mm,生成网格数为276万,直驱式水轮机网格模型如图3所示。

图3 直驱式水轮机网格模型Fig.3 Grid model of direct drive hydraulic turbine
为模拟真实流速水域环境,取20 ℃时海水密度ρ=1 025 kg/m3,黏度系数μ=1.056 5×10-3pa·s,设置入口平面为速度入口,出口平面为压力出口,采用马尔科夫随机场MRF(markov random field)模型,湍流模型为RNGk-ε,压力和速度耦合采用Cou⁃pled 算法,动量离散采用二阶迎风格式,时间离散为一阶隐式格式,残差绝对收敛标准为10-3。由Fluent输出转矩系数Cm为

式中,D为特征长度。
由式(4)计算出叶轮获得的转矩M1。模拟不同潮流流速v及叶轮转速ω,由式(3)得到潮流发电叶轮效率特性曲线如图4所示。
由图4可知,叶轮最大获能效率约为45%,不同流速环境下,叶轮最大获能效率对应的叶轮最佳转速ω不同,且ω随流速v增大而增大。由于直驱式叶轮与发电机转子同轴连接,叶轮转速ω等于发电机转子转速ωr,因此可通过调整电磁力,实现发电机最佳转速跟踪,确保叶轮获能效率最大。

图4 直驱式叶轮效率曲线Fig.4 Efficiency curves of direct drive impeller
2 潮流发电系统控制单元
本文所提自适应无源控制策略原理如图5 所示。系统采用自适应算法实时辨识潮流的随机激励力(即叶轮获得转矩波动值),与转速误差共同构成无源控制器的误差状态矩阵,通过调节阻尼注入矩阵,加快系统收敛速度;无源控制器输出的ud、uq经脉冲宽度调制PWM(pulse width modulation)模块生成调制波,控制三相整流器开关次序,实现对最佳转速目标跟踪,达到系统输出功率最大。

图5 自适应无源控制策略原理Fig.5 Principle of adaptive passivity-based control strategy
2.1 PMSG 数学模型
假设发电机铁芯不饱和,不计磁滞涡流损耗等;永磁材料电导率为0,磁动势按正弦分布,忽略高次谐波[7]。PMSG的d、q轴数学方程可表示为。

式中:ud、uq分别为PMSG 的d、q轴电压分量;id、iq分别为PMSG 的d、q轴定子电流分量;Rs为定子绕组的电阻;Ld、Lq分别为PMSG 的d、q轴电感分量;ψf为永磁体转子磁链;Te为电磁转矩;Pn为发电机磁极对数;ωr为发电机角速度。
系统PMSG参数采用发电机定子电阻Rs=1.85 Ω,电感系数Ld=Lq=45e-3H,极对数Pn= 24,永磁体磁链ψf=1.65 Wb,发电机转动惯量J=3 kg·m2,发电机摩擦系数Bm=0.008 N·m·s。
2.2 叶轮获得转矩自适应辨识
针对潮流能波动导致水轮机获得转矩M1变化较大的问题,提出转矩自适应辨识方案,通过对水轮机获得转矩M1即负载转矩TL的实时辨识,提高PMSG 的电磁转矩测量精度。电机转子转动方程为

由于潮流能的波动性,导致TL为时变量。为提高实时辨识TL,假设自适应控制器的采样频率远大于负载转矩变化时间[8],可得

由式(12)可知,调节稳定极点g可实现发电机负载转矩实时辨识。
2.3 潮流发电系统无源控制策略
针对潮流发电机长期处于低速运行状态,传统转速跟踪控制方法导致转矩振幅大,不利于发电机长期运行的问题,本文构建了基于欧拉-拉格朗日EL(Euler -Lagrange)模型[9]的无源控制器,完成对发电机转子最佳转速跟踪,其步骤如下。
步骤1 将PMSG数学模型构建成EL方程,即

式中:M为正定对角矩阵;J1为反对称矩阵;R为正定矩阵;u为输入变量;x为系统状态变量。
无源控制目标是使转速ωr达到最佳转速ω*r,定义误差函数xe为
式中:ẋe为误差函数xe的一阶导数;ẋ*为状态变量矩阵x的期望值的一阶导数。
注入阻尼可以加快能量耗散,加快系统响应。设阻尼耗散项为

自适应无源控制策略以调节注入阻尼矩阵的方式加速系统收敛速度,确保发电机达到最佳转速,以期达到潮流发电系统输出功率最大。
3 联合仿真分析
3.1 建立水轮机获能模型
为验证本文所提控制算法的有效性,建立潮流发电系统控制模型,其结构如图6所示。

图6 潮流发电系统结构Fig.6 Structure of tidal current power generation system
图中,Udc、iabc分别为潮流发电系统整流后直流电压及整流前三相电流,iabc经dq变换后输入至无源控制器。自适应无源控制器输出PWM波作为绝缘栅双极型晶体管IGBT(insulated gate bipolar transistor)的驱动信号,实现最佳转速跟踪。当潮流流速为2 m/s时,叶轮获能效率曲线如图7所示。

图7 潮流系统获能效率曲线Fig.7 Energy efficiency curve of tidal current system
由图(7)可知,发电机转速达到2.716 rad/s 时,叶轮获能效率达到最大值45.23%,取水轮机稳定运行状态10 s 内的转矩系数,由式(5)得转矩拟合曲线如图8所示。
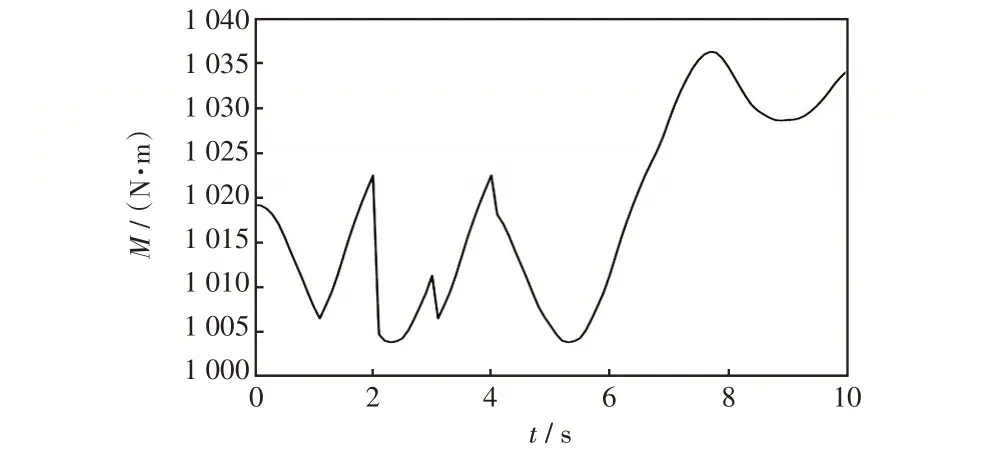
图8 叶轮获得转矩拟合曲线Fig.8 Fitting curve of torque obtained by an impeller
3.2 潮流发电无源控制仿真分析
为验证本文所提算法有效性,搭建基于Matlab仿真实验平台的潮流发电系统模型,对系统的动、静态特性进行分析,并与传统直接转矩控制DTC(direct torque control)进行对比实验。
3.2.1 静态特性分析
为验证潮流发电系统静态性能,输入流速2 m/s,此时转矩波动为外界干扰,将fluent导出的叶轮获得转矩转化为Matlab 可读的矩阵格式[11],作为发电机负载转矩。为使发电机处于发电状态,将负载转矩改为负值。仿真采样时间为1×10-5s,运行潮流发电控制系统,可得负载转矩辨识波形如图9所示。
由图9 可知,负载转矩辨识误差小于0.4 N·m,且响应速度较快。为验证控制算法的转速跟踪效果及输出功率性能,设定输出端载荷为80 Ω,转矩辨识期望极点g=-200,发电机电磁转矩增益K2=1×107,注入阻尼ra=rb=7,仿真采样时间为1×10-5s,得到潮流发电系统输出波形如图10所示。

图9 负载转矩辨识实验波形Fig.9 Experimental waveform of load torque identification
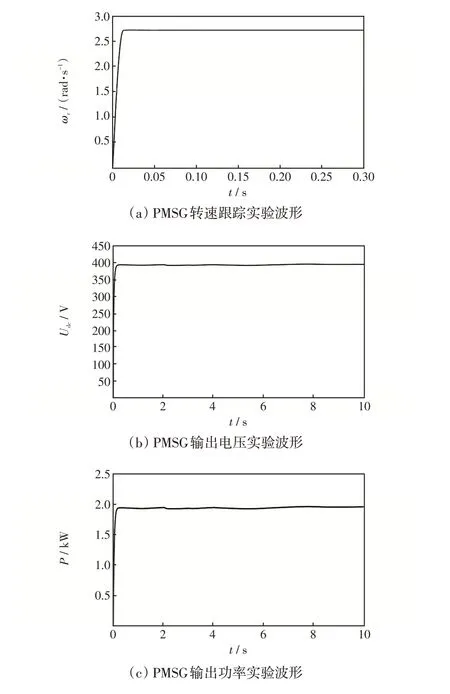
图10 无源控制系统静态波形Fig.10 Static waveforms of passivity-based control system
由图10 可知,当输入流速及输出端载荷不变时,系统在0.05 s内即可实现转速的良好跟踪,直流母线电压及输出功率因负载转矩波动有小幅振荡,但整体波形稳定。
3.2.2 动态特性分析
为验证控制方案的动态性能,模拟输入流速由2 m/s突降至1 m/s,将导致负载转矩波动,同时最佳转速变为1.36 rad/s;模拟输出端载荷变化和系统动态波形如图11~12所示。

图11 输入流速突变实验波形Fig.11 Waveforms in input velocity mutation experiment
由图11 可知,当输入潮流能出现较大波动时,系统在0.1 s内完成最佳转速跟踪,输出电压及功率因输入功率下降而降低,但在较短时间内达到输出功率稳定。
由图12 可知,当输出端接入不同阻值的载荷时,系统均能在0.05 s内完成较好的转速跟踪,输出电压随阻值减小而降低,但输出功率波动较小,约为1 940 W。


图12 载荷变化实验波形Fig.12 Waveforms in load changing experiment
3.2.3 与DTC 对比仿真
为比较无源控制策略的输出功率优化性能,搭建传统DTC方案进行对比,设输入流速为2 m/s,输出端负荷阻值为80 Ω,系统仿真采样时间为1×10-5s,仿真结果如图13所示。


图13 潮流发电系统输出功率Fig.13 Output power from tidal current power generation system
由图13(a)可知,2种控制策略均能实现转速跟踪,但相较于传统DTC 控制策略,无源控制策略在0.05 s 内即实现速度跟踪,而DTC 控制需0.3 s。由图13(b)、(c)可以看出无源控制相比于DTC控制系统输出电压及输出功率更高,其中功率增加了约50 W。
4 结 论
(1)结合潮流发电系统水动力模型及数学模型,得到了功率特性曲线及转矩拟合曲线。
(2)构建了基于自适应无源算法的潮流发电系统控制模型,模拟不同潮流流速环境及输出端载荷变化。结果表明,本文所提控制策略,抗干扰能力较强,响应速度较快,输出功率相较于传统控制策略更高。
