半潜支持平台与FPSO靠泊运动频域水动力性能研究1
2021-08-18陈晓锋
陈晓锋
(南通中远海运船务工程有限公司,江苏南通 226001)
0 引言
半潜式平台每年的平均事故率远超其他类型的海洋平台[1],开展支持平台与浮式生产储油卸油装置(Floating Production Storage and Offloading,FPSO)的靠泊方案设计、探索适合FPSO的靠泊运动耦合技术对于保障FPSO上的生产和船员活动具有重要意义。支持平台和生产平台靠泊连接状态是深水半潜式支持平台在海上作业过程中的一个典型工作状态。此时深水半潜式支持平台处于靠泊连接就位位置,和各类生产平台之间通常保持数十米距离,进行近距离靠泊,支持平台上的登船栈桥与生产平台连接,以进行人员和物资的转运。为满足不同海域和不同油田的各种需求,靠泊的生产平台类型种类繁多,包括固定式导管架平台、半潜式生产平台、张力腿平台、立柱式平台和FPSO等[2]。
深水半潜式支持平台与其他生产平台进行靠泊的过程中,多平台之间的耦合水动力干扰问题是影响靠泊安全的关键因素之一。其耦合水动力性能的求解涉及多个复杂影响因素,包括近距离多个浮体间的非线性辐射和绕射波浪影响、平台近距离靠泊状态下的相互遮蔽效应对海风和海流等环境荷载的影响,以及各平台间的耦合运动、系泊载荷等水动力响应的非线性特性的影响。
本文通过采用 AQWA软件基于三维势流理论进行多浮体耦合频域水动力分析,考虑支持平台与FPSO间不同的靠泊间距、支持平台靠泊方向、FPSO装载状态等因素,建立耦合分析水动力模型,采用近场法考虑浮体间的水动力耦合作用。对典型浪向条件下耦合状态和非耦合状态的浮体水动力性能对比,分析靠泊间距、靠泊方向和FPSO装载状态因素对水动力影响的大小,总结多浮体耦合频域水动力特点。
1 水动力模型建立
为准确预报支持平台与FPSO间的水动力耦合作用,将FPSO及支持平台进行细致的网格划分。考虑到频域分析时的最小波浪周期为3 s,因此将湿表面网格最大尺寸定为2.8 m。
1.1 F PSO湿表面
FPSO在不同载况时发生较大纵倾,艏艉存在较大的吃水差,因此在水动力分析时将FPSO纵倾调至设计纵倾状态。满载时FPSO艏吃水为21.5 m,艉吃水为24.5 m;压载状态FPSO艏吃水为9.2 m,艉吃水为11.85 m。图1和图2分别为满载状态和压载状态的湿表面网格。

图1 FP SO满载状态湿表面网格

图2 FP SO压载状态湿表面网格
满载状态时FPSO总网格数为11 076,其中湿表面网格数为9 196;压载状态时,FPSO的总网格数为11 129,其中湿表面网格数为8 142。网格大小分布均匀,同时较为准确地描述了FPSO水下部分的形状。
1.2 北海型支持平台湿表面
北海型支持平台的网格采用与FPSO相同的网格尺寸,总网格数为8 386,湿表面网格数为5 859。由于横撑结构沿长度方向直径变化,因此在建立其水动力模型时采用面单元模拟。北海型支持平台的湿表面模型见图3。

图3 北海型支持平台湿表面模型
1.3 标准型支持平台湿表面
标准型支持平台总网格数为5 927,湿表面网格数为4 478。横撑结构初端部外直径相同,因此采用莫里森单元模拟,莫里森单元数为 132。北海型支持平台的湿表面模型见图4。

图4 标准型支持平台湿表面模型(未显示实际横撑直径)
2 无因次阻尼修正
根据FPSO试验数据以及半潜式支持平台母型船试验数据,对垂荡、横摇和纵摇自由度的水动力进行修正,附加阻尼的无因次阻尼比见表1。垂荡、横摇和纵摇附加质量取固有频率时的附加质量,刚度取静水回复刚度。

表1 无因次阻尼比
3 全局坐标系定义
北海型支持平台与FPSO靠泊状态坐标系定义见图5,坐标原点位于支持平台和FPSO中纵剖面上,同时位于支持平台中横剖面上。FPSO长度和支持平台长度方向为x轴,以平台艏部方向为正;FPSO和支持平台宽度方向为y轴,以平台左舷为正。

图5 北海型支持平台与FPSO靠泊状态坐标系定义
标准型支持平台与FPSO靠泊状态坐标系定义见图 6,定义坐标原点位于标准型支持平台水线面中心处,标准型支持平台下浮箱长度方向为x方向,以平台艏部方向为正;下浮箱宽度方向为y方向,以平台左舷为正。定义标准型支持平台与FPSO的间距为右浮箱外侧到FPSO艏部平面间的距离,以D表示。考虑到舷梯的允许伸缩长度,D取38.3 m,此时舷梯的长度为38.5 m。

图6 北海型支持平台与FPSO靠泊状态坐标系定义
4 耦合作用对水动力的影响
针对FPSO与北海型和标准型支持平台靠泊状态,通过对比耦合状态与非耦合状态下FPSO及半潜支持平台典型角度下的水动力响应,分析不同间距对FPSO及半潜支持平台的频域运动响应的影响。本研究的支持平台(北海型及标准型)均处于操作吃水状态与FPSO靠泊,因此对于作业状态的说明仅针对FPSO。考虑到FPSO在满载状态和压载状态吃水变化较大,因此在分动力分析时考虑 2种FPSO的作业状态。
4.1 FPSO满载状态与北海型支持平台靠泊工况
4.1.1 FPSO水动力响应
FPSO与支持平台在长度方向旁靠,在沿船长方向(x方向)存在一定的遮蔽作用,因此水动力分析主要针对波频运动响应以及水动力影响可能较大的纵荡运动响应,以分析耦合状态下FPSO水动力的特点。为分析水动力的耦合效应大小以及不同靠泊间距对水动力的影响大小,将非耦合状态下的响应与3种不同的间距耦合状态下的响应进行对比。定义靠泊间距D为支持平台下浮箱后端与FPSO前端的距离。
幅值响应算子(Response Amplitude Operator,RAO)指浮体在某一频率单位波幅规则波作用下对应浮体的运动响应,反应浮体水动力性能属性,是计算运动响应时必需的水动力参数[3]。图7为FPSO满载状态时,不同状态下FPSO的纵荡、垂荡、横摇和纵摇响应RAO曲线。图中无耦合状态表示为Uncoupled,D=5 m、D=21 m和D=35 m分别表示靠泊间距为5 m、21 m和35 m。
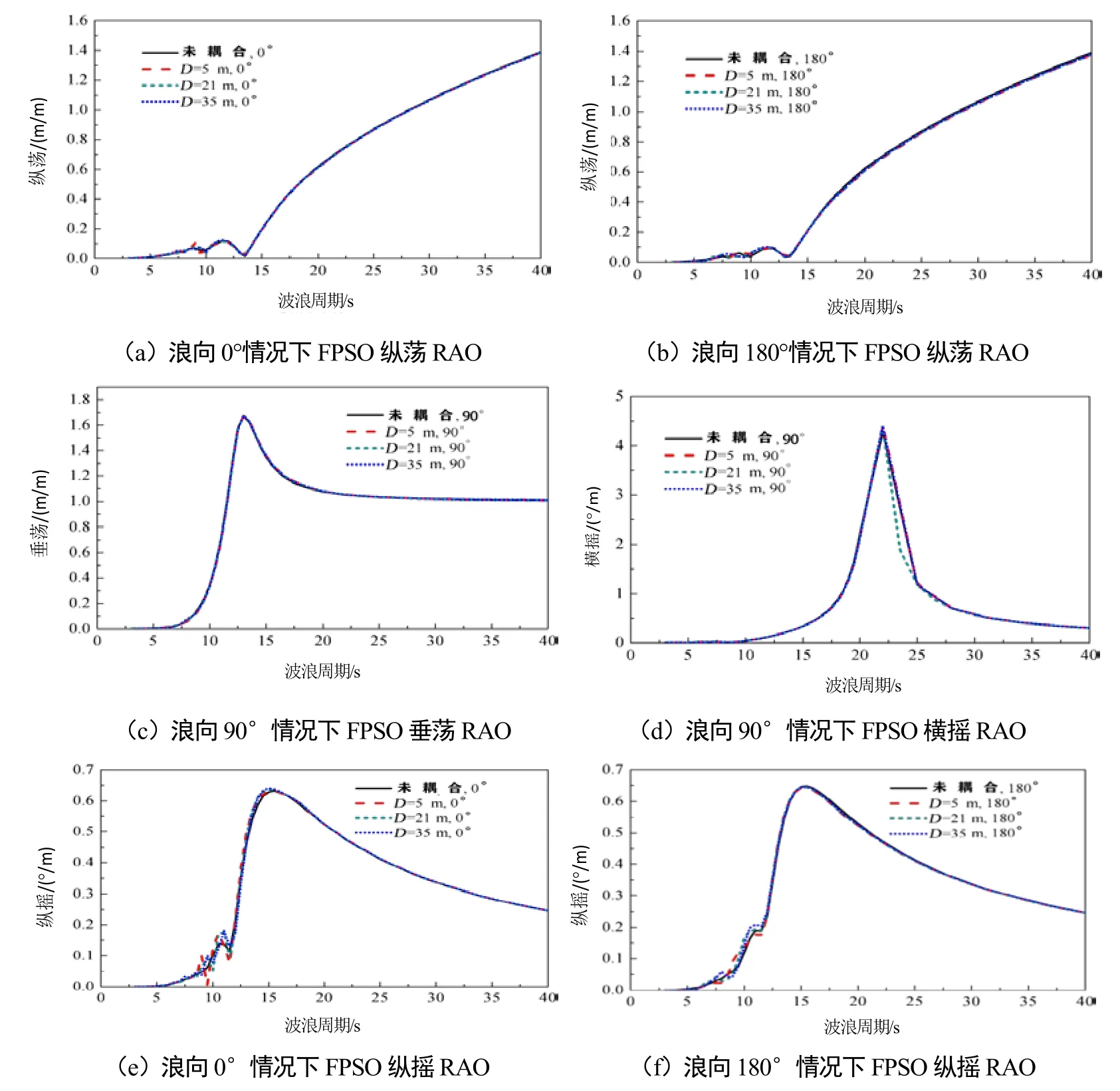
图7 满载工况FPSO水动力响应
从图7(a)和图7(b)可发现,波浪周期较大即波浪频率较低时,无论是浪向为0°或180°时,纵荡RAO差别不大,此时纵荡耦合作用不强,同时对间距大小也不敏感;波浪周期较小时,如周期为10 s左右,纵荡RAO存在很小差异。从图7(c)和(d)可看出,耦合作用对垂荡和横摇RAO几乎没有影响。图7(e)和图7(f)可发现FPSO纵摇响应在波浪周期大于12 s后在不同间距的耦合作用下差别不大,在周期10 s左右时存在一定差别。综合来看,耦合作用对 FPSO的垂荡和横摇 RAO几乎没有影响,对纵荡和纵摇RAO的影响主要在波浪周期为10 s左右的小范围,对周期大于12 s时的纵荡和纵摇无明显影响。
4.1.2 北海型支持平台水动力响应
图8为无耦合状态和不同靠泊间距下北海型支持平台纵荡、垂荡、横摇和纵摇RAO。图中无耦合状态表示为Uncoupled,D=5 m、D=21 m和D=35 m分别表示为靠泊间距为5 m、21 m和35 m。

图8 支持平台水动力响应(FPSO满载工况)
从图8(a)可看出耦合状态下FPSO对支持平台产生明显的遮蔽效应,导致支持平台在浪向为0°下的纵荡RAO与非耦合状态有所减小。间距越小支持平台纵荡RAO越小,遮蔽效应越明显,遮蔽作用在计算波浪周期范围均较明显。从图8(b)中发现当波浪为180°,即波浪从支持平台向FPSO传播时,在波浪周期大于16 s时耦合效应不明显,而波浪周期处于6 s~16 s时出现明显的耦合作用。从图8(c)可发现长波作用下不同间距时的垂荡耦合作用不明显,短波作用下耦合作用对支持平台垂荡RAO有一定影响。从图8(d)可发现耦合作用对支持平台的横摇RAO影响不大。
从图8(e)和图8(f)可发现,在支持平台纵摇共振周期时,较小的间距导致纵摇RAO幅值增大,而间距较大时纵摇固有周期下的RAO幅值与非耦合状态无明显差别。波浪周期较小时,波浪角度为0°和180°下纵摇RAO呈现不同的趋势:1)浪向为0°时,波浪周期为5 s~7 s和10 s~15 s时耦合状态纵摇RAO幅值比非耦合状态小;2)浪向为180°时,波浪周期为5 s~7 s和10 s~15 s时耦合状态纵摇RAO幅值比非耦合状态大。总体来说耦合作用下波浪周期较小时,浪向角为0°时经过FPSO绕射的波浪会导致支持平台纵摇RAO幅值减小,浪向角为 180°时支持平台直接迎浪会导致支持平台纵摇RAO幅值增大。
4.2 FPSO压载状态与支持平台靠泊工况
4.2.1 压载状态FPSO水动力响应
FPSO压载状态与支持平台靠泊时,FPSO的纵荡、垂荡、横摇和纵摇RAO曲线见图9。图9中无耦合状态表示为 Uncoupled,D=5 m、D=21 m 和D=35 m分别为靠泊间距为5 m、21 m和35 m。

图9 压载工况FPSO水动力响应

图9 压载工况FPSO水动力响应(续)
从图9(a)、图9(c)和图9(d)可发现压载状态FPSO与支持平台靠泊时耦合作用对0°浪向的纵荡、90°浪向的垂荡和横摇水动力影响不明显,从图9(b)可发现长周期时距离越大,180°浪向的纵荡RAO越小,遮蔽效应越明显。
从图 9(e)和图 9(f)可发现浪向角为 0°和180°的情况下,除了波浪周期为10 s左右时,不同间距的靠泊耦合作用对纵摇运动RAO影响不大。
4.2.2 北海型支持平台水动力响应
图 10为无耦合状态和不同靠泊间距下北海型支持平台纵荡、垂荡、横摇和纵摇RAO。图中无耦合状态表示为Uncoupled,D=5 m、D=21 m和D=35 m分别表示靠泊间距为5 m、21 m和35 m。

图10 支持平台水动力响应(FPSO压载工况)

图10 支持平台水动力响应(FPSO压载工况)(续)
从图10(a)可发现靠泊状态浪向角为0°时,FPSO对支持平台起到了一定的遮蔽作用,尤其在波浪周期小于15 s时更为明显。从图10(b)可发现靠泊状态浪向角为180°时,波浪周期小于16 s时耦合作用对纵荡RAO影响较大,随波浪周期变化呈不同的规律,波浪周期大于16 s后对纵荡RAO影响不大。从图10(c)和图10(d)可发现浪向角为 90°时耦合作用对支持平台垂荡和横摇几乎没有影响。
从图10(e)和图10(f)可发现波浪周期大于16 s时,耦合作用对支持平台的纵摇RAO影响不大,波浪周期小于16 s时随着浪向不同,呈现不同趋势:1)浪向角为0°时,FPSO对支持平台产生明显的遮蔽作用,导致耦合状态下纵摇RAO幅值减小;2)浪向角为 180°时,在一定波浪周期范围导致纵摇RAO幅值相比非耦合状态有所增大,可能由于排水量较大的FPSO对波浪的反射作用导致支持平台的纵摇出现一定的干扰,进而导致支持平台的纵摇幅值增大。
4.3 F PSO与标准型支持平台靠泊工况
标准型支持平台通常侧向靠泊与FPSO艏部,标准型支持平台下浮箱与FPSO的最小距离为38.3 m。因此,通过针对固定间距下的支持平台与FPSO近距离靠泊状态水动力进行探究,分析多浮体耦合作用的影响。
4.3.1 FPSO水动力响应
满载和压载状态FPSO纵荡、垂荡和纵摇RAO如图11所示。浪向角为90°和270°时,波浪传播方向与靠泊方向相同,因此需要重点关注。图11(a)和图 11(b)分别为满载和压载状态浪向角为 90°和270°下FPSO的纵荡响应RAO,图11(c)和图11(d)分别为满载和压载状态下FPSO的垂荡响应RAO,图11(e)和图11(f)分别为满载和压载状态浪向角为90°和270°下FPSO的纵摇响应RAO。

图11 满载状态FPSO纵荡、垂荡和纵摇RAO

图11 满载状态FPSO纵荡、垂荡和纵摇RAO(续)
从图11(a)和图11(b)可看出满载和压载状态时,浪向角为 90°和 270°时水动力耦合作用对FPSO的纵荡运动RAO影响不明显;从图11(c)和图 11(d)可可以看出无论是满载还是压载工况下,耦合作用对垂荡的影响不明显。从图 11(e)和图11(f)可发现在波浪周期在10 s左右时,耦合状态下的纵摇响应RAO存在明显差异,波浪周期较大时无明显差异。
4.3.2标准型支持平台水动力响应
图12为标准型支持平台纵荡、垂荡、横摇和纵摇RAO曲线。图12中FF(FPSO Full)表示靠泊的FPSO处于满载状态,FB(FPSO Ballast)表示靠泊的FPSO处于压载状态。

图12 标准型支持平台纵荡、垂荡、横摇和纵摇RAO

图12 标准型支持平台纵荡、垂荡、横摇和纵摇RAO(续)
从图12(a)可发现浪向角为90°时,耦合状态下支持平台横荡RAO要小于非耦合状态,因此支持平台的横荡运动受FPSO的遮蔽作用明显。从图12(b)可发现波浪周期较小时耦合状态下的横荡运动与非耦合状态有一定差别,波浪周期较大时无明显差别。从图12(c)和图12(d)可看出波浪周期小于15 s时,耦合状态下的垂荡和横摇响应要比非耦合状态小。另外波浪周期较大时,靠泊与压载状态的FPSO时标准型支持平台的横摇RAO要比非耦合状态以及靠泊与满载状态的FPSO大。从图12(f)可看出耦合作用对标准型支持平台的纵摇RAO影响不大。
5 结论
通过对2种载况的FPSO与北海型和标准型支持平台靠泊状态的水动力响应进行对比分析,可以得出:1)整体来看,耦合作用对排水量较大的FPSO水动力响应影响不大,而对排水量相对较小的支持平台影响较大;2)北海型支持平台耦合作用只对浮体的纵荡和纵摇响应影响较大,而对垂荡和横摇运动响应影响不大;3)标准型支持平台耦合作用只对浮体的横荡和横摇响应影响较大,而对垂荡和纵摇运动响应影响不大。当波浪从FPSO传播至支持平台时,对支持平台的横荡和横摇产生一定的遮蔽作用,在波浪周期较小时尤为显著。
