自动驾驶客车线控转向响应性能台架测试研究
2021-08-16汪双柱
汪双柱
(中兴智能汽车有限公司,广东 珠海 519040)
线控转向系统是自动驾驶汽车的重要组成部分[1-3]。响应性能作为线控转向系统重要的指标,直接影响转向控制的精准度,对车辆的舒适性和安全性有重大影响。在线控转向系统的选型过程中,需要开展响应性能测试,以确保其符合设计要求。目前该测试一般在样车下线后进行,发现问题后的整改或重新选型耗时较长,对整车的开发进度影响较大。本文基于某自动驾驶客车线控转向系统选型的需要,提出一种线控转向系统响应性能的台架测试方案,并在样车下线之前开展测试,选出符合设计要求的线控转向系统,节约整车开发时间。
1 测试系统的搭建
1.1 测试系统构成
线控转向系统的响应性能测试包括跃阶响应性能测试及正弦响应性能测试。测试系统方案如图1所示。测试方案中CAN收发器、线控转向系统参照实车状态进行配置和安装。

图1 测试系统方案示意图
其中,线控转向系统是被测样件,直流稳压电源用于给CAN收发器及线控转向系统控制器提供工作电源,测试系统其他部分在后文详述。
1.2 CANoe工具
测试过程中,利用CANoe工具[4]生成线控转向系统输入报文指令,并接收CAN总线上的转向结果报文数据,以及进行响应性能的测试结果分析。
1.3 CAN收发器
在实车状态下,转向系统输入报文指令是通过整车控制器发出,线控转向系统接收到指令后再执行转向动作,整车控制器对转向系统的响应性能影响较大。为模拟实车状态下线控转向系统的真实响应性能,在图1所示的测试系统中布置CAN收发器,它由整车控制器改造而来——将整车控制器转向控制相关功能保留,屏蔽掉其他功能。测试过程中,由CANoe工具生成转向输入指令报文,CAN收发器接收指令后,输出至线控转向系统的转向控制器,执行转向动作。
1.4 转向阻力模拟电机
测试时采用电机阻力矩来模拟汽车原地转向时转向器输出端的阻力矩。此阻力矩可以通过两种方式获得:
1)采集相似车辆原地转向时转向器的输出力矩值。
2)按经验公式[5-8]计算原地转向阻力矩,再根据转向器角传动比或转向摇臂长等换算为转向器输出端阻力矩。原地转向阻力矩计算公式为:
Tr=f/3·(G3/P)1/2
式中:Tr为原地转向阻力矩,N·m;f为轮胎与路面的滑动摩擦系数;G为转向轴负荷,N;P为轮胎气压,Pa。
1.5 线控转向系统
测试时,线控转向系统的输入为各个时刻期望达到的转向角度,即目标转向角度;输出为转向系统内置的角度传感器测量的各个时刻的实际转向角度,即实际反馈转向角度,由转向系统控制器以报文的形式发送在CAN总线上。
2 测试及结果分析
2.1 跃阶响应性能测试
2.1.1 跃阶响应性能主要指标
自动驾驶汽车线控转向系统跃阶响应性能主要指标有响应时间、超调时间、最大超调角度和最大稳态误差等。如图2所示,其定义如下:
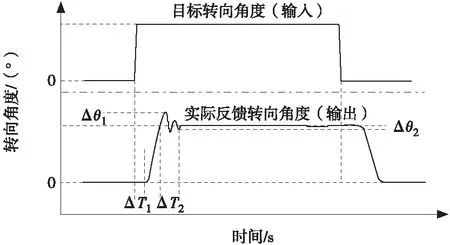
图2 跃阶响应性能主要指标示意图
1)响应时间ΔT1。是指CAN总线上开始发出目标转向角度指令的时刻到接收到实际反馈转向角度开始产生变化的时刻之间的时间差。
2)超调时间ΔT2。是指实际反馈转向角度第一次达到目标转向角度时刻与实际反馈转向角度第一次达到最大误差要求时刻之间的时间差。
3)最大超调角Δθ1。是指转向过程中实际反馈转向角度超过目标转向角度的最大角度值。
4)最大稳态误差Δθ2。是指实际反馈转向角度达到目标转向角度(稳态)时存在的最大误差。
2.1.2 跃阶响应性能测试步骤
1)采集相似车型转向器输出端的阻力矩值为3.6 N·m,作为测试线控转向系统的加载输入力矩。
2)按图1所示,安装待测试的线控转向系统样件,连接转向阻力矩模拟电机,连接各路硬线和CAN总线。设置上述1)中的转向阻力矩值。
3)20°转角步长跃阶响应测试。为实现图2所示的跃阶输入,采用CANoe工具设定跃阶转向速度为600°/s(也可以是其他数据,仅用于设定输入曲线斜率,不影响测试结果),目标转向角度分别为0°、20°、40°和60°,记录目标转向角度曲线和实际反馈转向角度曲线,按图2所示定义,利用CANoe软件光标功能测量其响应时间、超调时间、最大超调角度和最大稳态误差。
4)90°转角步长跃阶响应测试。重复步骤3),输入的跃阶转向速度不变,设定目标转向角度分别为0°、90°、180°和270°,记录目标转向角度曲线和实际反馈转向角度曲线,利用CANoe软件光标功能测量各响应性能指标。
5)按此方法,完成180°、360°和720°转角步长跃阶响应测试。
2.1.3 跃阶响应测试结果分析
所测线控转向系统的跃阶响应性能结果见表1。从测试结果来看,2.1.1中的4项主要指标均优于设计要求。

表1 跃阶响应性能指标设计要求及测试结果
2.2 正弦响应性能测试
2.2.1 正弦响应性能主要指标
自动驾驶汽车线控转向系统的正弦响应性能主要指标为延迟时间ΔT,如图3所示,其定义为目标转向角度指令与接收到实际反馈转向角度的时间差。通常以相邻的目标转向角度和实际反馈转向角度对应的正弦曲线峰值的时间差作为测试结果。
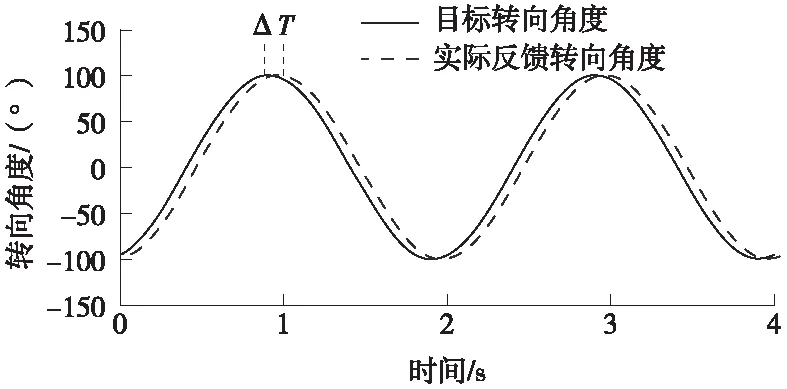
图3 正弦响应延迟时间示意图
2.2.2 正弦响应性能测试步骤
1)、2)与2.1.2相同。
3)幅值100°周期2 s响应性能测试。采用CANoe工具设定目标转向角幅值和周期为100°和2 s,记录目标转向角度曲线和实际反馈转向角度曲线,利用CANoe软件光标功能测量其响应延迟时间。
4)同上,分别完成目标转向角幅值/周期为200°/4 s、300°/4 s、400°/6 s和500°/6 s的正弦输入的响应性能测试。
2.2.3 正弦响应测试结果分析
线控转向系统正弦响应性能测试结果见表2。设计要求延迟时间小于200 ms,各幅值与周期下的最大延迟时间均优于设计要求,线控转向系统表现优异,可以精准执行整车控制器指令。
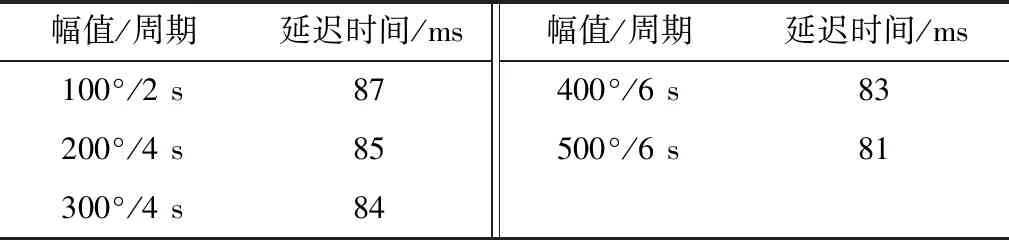
表2 正弦响应性能测试结果
3 结束语
运用本文方案对该自动驾驶客车的线控转向系统的响应性能进行了测试评价。样车下线后的整车测评中,所选线控转向系统的响应性能和控制精度都达到了设计预期。达到了台架测试的目的。