海洋探测无人艇:平台设计及应用
2021-08-13王伟平何西董超郑兵李雪
王伟平,何西,董超,3,郑兵,3,李雪,3
(1. 国家海洋局南海调查技术中心,广东 广州 510300; 2. 自然资源部海洋环境探测技术与应用重点实验室,广东 广州 510300; 3. 南方海洋科学与工程广东省实验室(珠海),广东 珠海 519080)
1 引言
水面无人艇(unmanned surface vessel,USV)指通过人在岸端遥控或水中自主规划航行,完成各项任务的水面运动平台,由于其具备吃水浅、快速机动、操作灵活等特点,在军事和民用领域均得到了广泛的应用[1-3]。在军事领域,USV可替代人执行艰苦、单调且高风险的军事任务,如扫猎雷、水面及水下警戒、小范围战术支持等。在民用方面,目前的USV有部分适用于海洋调查领域的成熟产品,国外厂商及其产品如英国ASV Global公司旗下的C-worker系列、C-Enduro,Ocean Science公司的Z-Boat系列,以及Sea-Robtics等,国内厂商如珠海云洲出品的M80、ME120,上海大学研制的“精海”系列无人艇,安徽科微推出的C400等。
随着技术的发展,无人艇的应用场景越来越复杂,无人艇通过集成海洋调查设备,可完成各类海洋探测任务,包括海洋测绘、水质采集、海洋监测[4-7]等;通过集成传感器设备,可完成高动态环境下的自主控制、智能航行与避障[8-11]等操作。同时,集成以上多种设备,可实现无人艇在更复杂海洋场景中进行海洋探测任务,如海上大桥桥墩受损监测与底质勘察、海上风电场风机与缆线运维[12-13]等,无人艇的参与降低了人直接参与海上活动的风险,节省任务执行时间,同步提高海上运维效率与经济效益。
与目前的海洋调查无人艇相比,本文的无人艇具备以下优势:双体、宽甲板平台设计,具备极高的航行稳定性,在3~4级海况下,其数据采集精度仍符合相关海洋调查规范要求;升降鳍结构设计,保证仪器设备安全,可在极浅水区作业;搭载多种感知设备,目前已加装导航雷达、激光雷达、光电吊舱、前视声呐等感知设备,保证其航行安全性;搭载多种调查设备,包含多波束、三维侧扫声呐、浅地层剖面仪等,是一种综合多功能调查无人艇。本次该无人艇参与江西省应急抗洪抢险,属于无人艇在该类场景中的首次应用。采用无人艇进行抗洪救灾现场应急救援,主要原因为:
(1)防洪堤岸巡检,由人工进行堤岸巡检效率低,且对于堤岸薄、易坍塌处难以发现与预防,通过无人艇沿堤岸大范围的扫测,提前找出堤岸危险点,进行加固或者重点监测,可以预防堤岸坍塌,极大地节省巡检时间,提高巡检效率;
(2)洪水湍急、环境复杂,大船无法作业,小船作业危险系数高,而采用目前装备多种传感器的中大型无人艇,不仅有主动避开障碍物的能力,且采集数据也更加稳定可靠;
(3)受天气影响小,洪水发生区域大雨时间较多,人工守堤危险系数高、操作不便,而无人艇能在雨、雪等复杂天气环境下作业,几乎不受天气影响,可高效完成任务。
2 无人艇平台设计
本文设计的无人艇命名“海洋探测1号”,为了提高复杂水域环境无人艇的生存能力和水底地形地貌调查能力,主要采用了:(1)双体平台设计,且具备宽阔的后甲板平台单元,一方面保障无人艇航行过程中艇体姿态的稳定性,另一方面宽阔的甲板单元具备更强的设备加装改造能力、拓展能力好,且甲板可容纳操作人员站立进行无人艇操控;(2)升降机构设计,“海洋探测1号”在两片艇体之间采用了升降机构,在升降机构下方平台安装多波束测深系统换能器,保证采集数据时换能器入水,遇到触礁危险时换能器出水回归初始位置,在抗洪救灾现场通过升降机构保证了多波束的安全与可靠运行。
2.1 艇体双体平台设计与技术指标
“海洋探测1号”无人艇平台整体结构上采用双主机推进模式,通过左右差速控制船舶的回转运动,选用高性能双体船型配小角度外倾船艏,其具备优点为:其航行时船体兴波小,有利于水声设备的工作;其甲板面积宽敞,提高平台的搭载能力和拓展性;双体船稳性好,在静水中的横摇衰减快,致使在不规则波上的摇摆消失得快;双体船两个螺旋桨轴线和片体间距都比较大,提高平台的操纵性和机动性;双体船侧向投影面积大,提高平台对侧向流的抵抗能力,提高平台的艏向稳定性。“海洋探测1号”船体型线如图1所示。
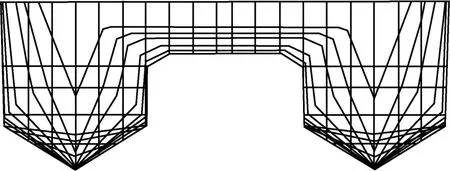
图1 “海洋探测1号”船体型线
“海洋探测1号”整体结构上共分为船体、设备舱、光电平台和甲板机械四大部分。
• 船体采用混合骨架结构进行加强,共分为3个舱室,从首至尾为防撞舱、动力能源舱和推进系统控制舱3部分,舱室之间设水密舱壁,通过过壁穿舱件走线,动力能源舱和推进系统控制舱对应甲板处设水密舱盖一个;动力能源舱左片体放置推进器的动力能源电池和充电机箱,右片体放置柴油发电机;油箱布置在船体中部的连接桥内;推进器为挂机形式,船尾预留一个舱室用于推进器控制盒等电子器件的安装。
• 设备舱位于甲板前部,主要用于布置平台的控制机箱、通信机箱、空调和任务设备控制机箱等硬件控制设备,设备布置为层架式结构;舱内预留人员工作位;舱体采用全密闭设计;设备舱内与片体连接处开一个舱盖,设置一个内隔舱;线缆通过设备舱与片体相接处走线密封;在设备舱后端面上布置水密门一个。
• 光电平台位于设备舱顶部,主要集成雷达、摄像头、惯性导航天线、舷灯和通信天线等多种光电设备,线缆集束后通过模块化穿舱件进入控制设备舱内。
• 甲板机械主要指位于甲板上的升降器和自动绞车,两者采用同轴线中心对称布置,线缆通过水密穿舱件引入设备舱内,甲板上预留内凹走线槽和轨道,便于后期拓展应用。 “海洋探测1号”的设计方案布置如图2所示,实物如图3所示。

图2 “海洋探测1号”设计方案布置

图3 “海洋探测1号”无人艇实物
“海洋探测1号”技术指标见表1。
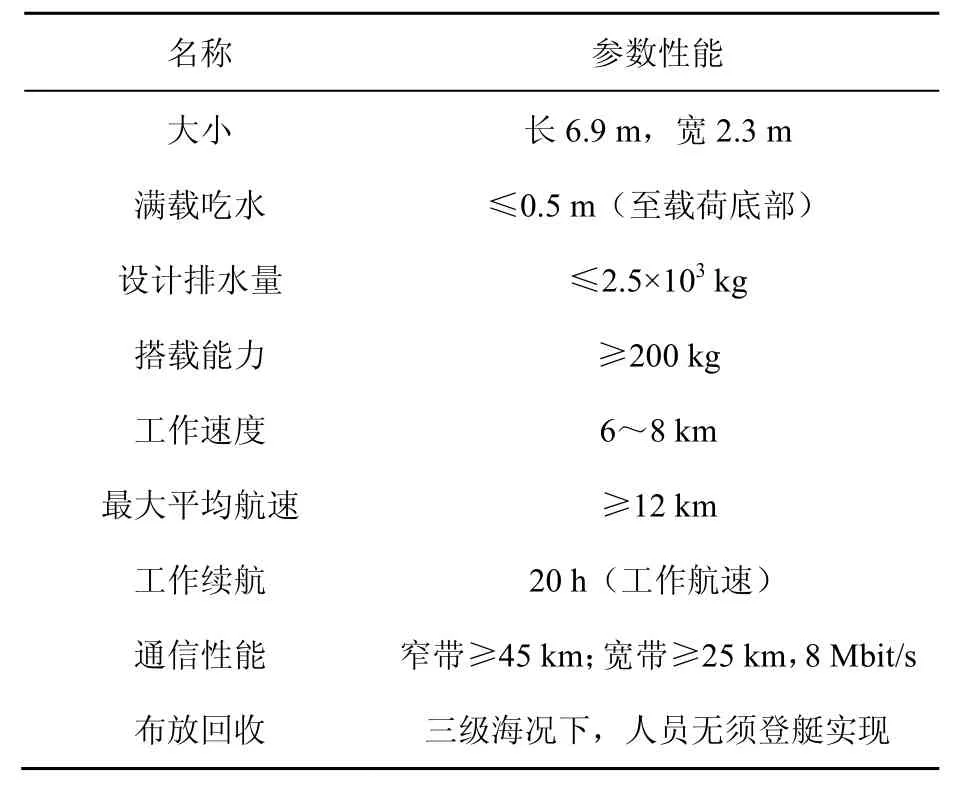
表1 “海洋探测1号”技术指标
2.2 升降机构设计与设备集成
多波束测深系统换能器的集成采用了升降机构设计,主要针对水域地形复杂、浅点较多的环境而设计,可防止无人艇搁浅,保护设备安全。升降机构布置于距船艏水线1/3处,采用液压机构驱动,主要实现水下探测设备的收/放。正常作业时,升降机构下放任务设备到指定的深度,开始作业任务。不作业正常航行时升降机构升起,将载荷设备提出水面,保护载荷设备并降低无人艇航行阻力,同时提高无人艇的通过能力。升降机构安装布置结构如图4所示。

图4 升降机构安装布置结构
升降机构采用液压折叠升降四连杆方式,可有效降低整船高度,不占用甲板面积,采用24 V DC双向微型液压泵驱动,液压缸行程为200 mm,缸径为40 mm,压力为13 kPa,伸出力为1 632 kg,回收力为1 224 kg,可满足50 kg任务载荷的需求。升降高度为456 mm,通过转接法兰盘实现不同任务设备的搭载,系统在液压缸意外泄压时能够自动发现并补压。升降机构工作状态示意图(上提状态)如图5所示。
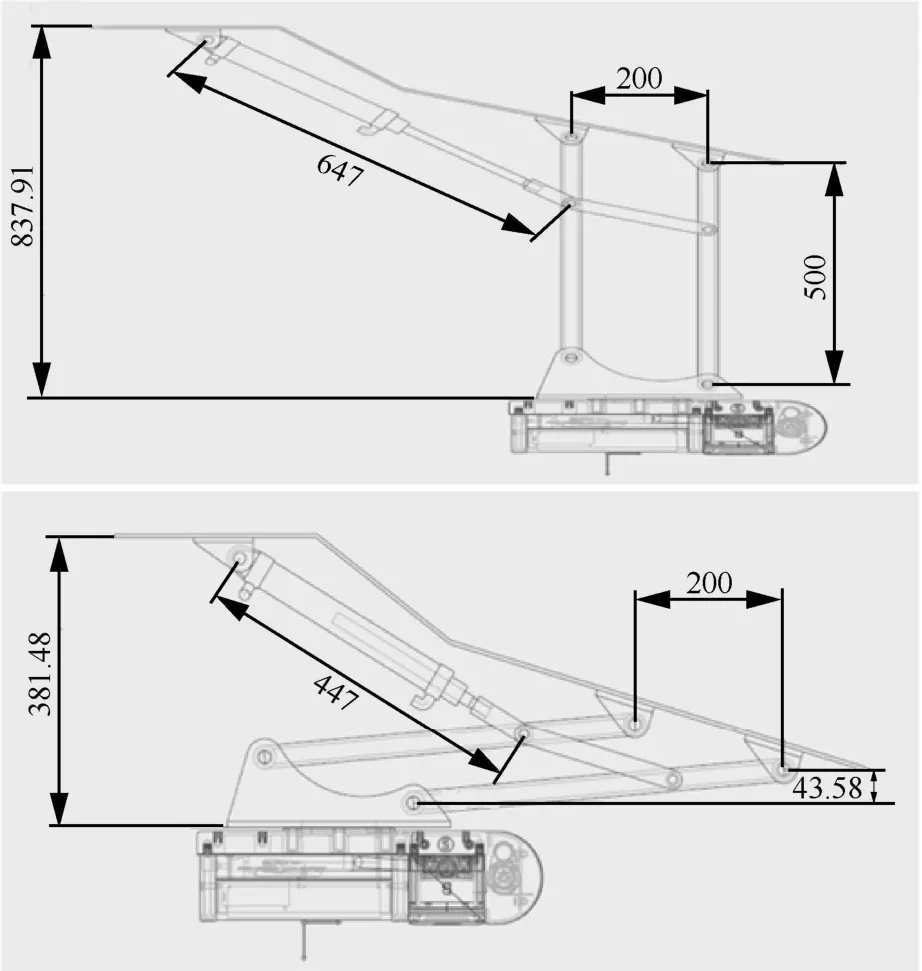
图5 升降机构工作状态示意图(上提状态)
升降机构集成的调查设备为浅水多波束系统,系统可以分为水下换能器和水上主机两部分,换能器安装于升降机构下端,通过液压泵驱动升降机构,实现多波束的入水工作和出水回收。工作时,保证船舶工作航速航行时换能器浸没在水中,并能有效避免乱流和附面层气泡的干扰;回收后,设备回收离开水面,降低设备风险。
多波束主机安装于设备舱内,换能器线缆通过水密穿舱件进入设备舱并接入主机,主机数据接口为TCP/IP,通过RJ45网口接入工控机内,通过远程桌面的形式在远端控制基站进行参数配置、数据采集及存储。多波束测深系统安装结构如图6所示。
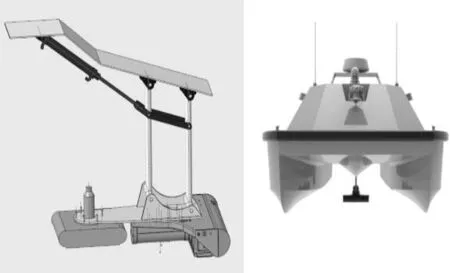
图6 多波束测深系统安装结构
3 应用案例分析
3.1 岸堤巡检背景
2020年7月,受连续强降雨影响,信江(鄱阳湖水系五大河流之一)水位持续上涨,长时间、高水位的浸泡,增加了堤防出险的可能。灾区各地堤坝管涌渗水不断,人工巡堤排查效率低。2020年7月21日,南海调查技术中心接到来自江西抗洪前线协助查险的邀请,立即抽调技术骨干组成抗洪小分队,携带“海洋探测1号”无人艇赶往江西省上饶市信江信瑞联圩六零腾溪段,使用艇载多波束测深系统进行岸堤巡检,排查管涌风险点。2020年7月22日上午,抗洪小分队在对现场环境进行初步排查后,克服底图缺失、江面环境复杂、现场保障条件不足等困难,开始作业。由于水位上涨、雨水冲刷、堤坝重筑等原因,水下部分的形貌已经改变,不能依据原有底图进行无人艇的测线布设,采用人工操控无人艇行进开展水下地形测绘,7月23日,完成信江信瑞联圩六零腾溪段14 km岸堤底质环境调查任务。
3.2 数据采集与处理
采用“海洋探测1号”完成信江信瑞联圩六零腾溪段14 km岸堤的巡检工作后,快速作出岸堤水下三维形貌图,经排查,判断岸堤整体健康,但存在4处疑似风险点,对疑似风险点进行重点分析,给出经纬度坐标、三维结构大小和局部高清图,并提出进一步排查与预防的建议。余干县信江信瑞联圩六零腾溪段大坝地形勘测总体如图7所示。

图7 余干县信江信瑞联圩六零腾溪段岸堤地形勘测总体
经排查,本段防洪岸堤存在的4处风险点如图8所示。
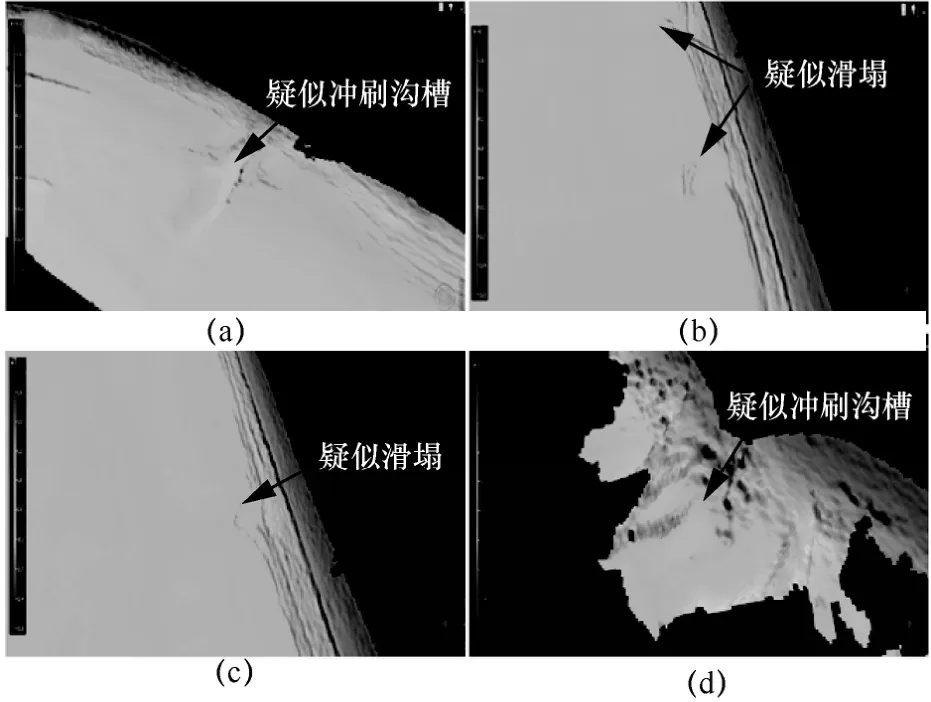
图8 本段防洪岸堤存在的4处风险点
在对14 km的大坝堤岸进行数据处理时,共发现4处风险点。图8(a)中风险点位于本段堤坝的下游位置,该处疑似为一冲刷沟槽,长约38 m,宽约5.5 m,深约0.5 m;图8(b)中风险点存在疑似滑塌,堤坡界面已经模糊不可见,并与疑似滑塌体相连;图8(c)中风险点位于风险点(b)北段约50 m处,存在滑塌可能;图8(d)中风险点位于本段堤坝的上游位置,疑似为一冲刷沟槽,长约8 m,宽约4.5 m,深约1 m。
3.3 数据精度分析
为评估采用双体宽平台设计和升降机构无人艇作业的效果,对“海洋探测1号”采集的14 km堤岸多波束数据进行精度分析,以说明无人艇航行稳定性和设计合理性。
(1)CARIS商业软件精度分析
基于国际海道测量组织(International Hydrographic Organization,IHO)特别出版物第44号(Special Publication No.44:S-44)的第4版规范,将测量分为特级、一级、二级、三级4个等级,利用CARIS商业软件对无人艇采集多波束原始数据进行处理,完成后利用软件自带测线精度分析功能,针对后处理数据进行数据质量精度评估。
利用CARIS HIPS and SIPS 水深后处理软件,在剔除测线粗差后,其内符合精度评估功能对测线数据进行计算得到的IHOS-44的特级、1a级和2级标准的比对结果如图9所示,可见,符合特级标准的数据合格率高于76.617%,符合1a级标准的数据合格率高于93.867%,符合2级标准的数据合格率高于98.609%。多波束测线数据质量内符合精度见表2。

图9 多波束测线数据内符合精度
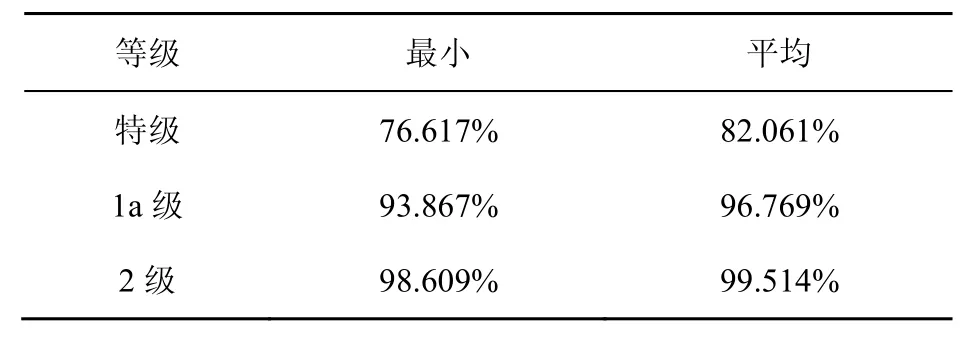
表2 多波束测线数据质量内符合精度
(2)主测线—联络测线精度分析
将经过后处理的联络测线数据与主测线的数字地形模型DTM进行比较,这个数字地形模型由测量区域的所有主测线所创建。通过比较联络测线水深点水深值与主测线数字地形模型的交叉点深度不符值,对交叉点深度不符值进行系统误 差及粗差检验。剔除系统误差和粗差后,水深小于30 m时不符值限差为0.6 m,水深大于30 m时不符值限差为水深的2%;超限点数不得超过参加对比总点数的10%。评估方式利用主测线与联络测线交叉点水深值进行水深测量精度评估,计算式为:

其中,M表示交叉点水深差值中误差,id表示第i个交叉点的水深差值,n表示主测线与检查线交叉点个数。
主测线以0.5 m网格间距进行网格化,联络测线共有1 153 876个测点,重复测点水深差值基本信息统计见表3,调查区平均水深在30 m以内,交叉点水深差值中误差为0.11 m,满足规范要求。

表3 水深差值基本信息统计
4 结束语
在无人艇作业水域,尤其近岸人类活动密集水域,或者洪灾发生水域,水流湍急,水质浑浊,漂浮垃圾多,对无人艇性能要求非常高。“海洋探测1号”无人艇采用双体、宽甲板平台设计, 并通过升降机构集成多波束换能器。这种设计可保证无人艇具备较高的航行姿态稳定性,提高复杂水域无人艇任务执行能力。经应用验证,“海洋探测1号”无人艇性能优良,具备在复杂水域开展水下探测的能力。
在无人艇应用到抗洪救灾的过程中,由于无人艇采集的多波束以及三维侧扫声呐数据,无法实时回传,也无法进行实时处理,防洪堤坝水下地形的数据处理结果需要等待较长时间,这对于随时会发生溃堤风险的防洪工作是不可接受的,数据处理不及时可能会给人民群众造成巨大生命财产的损失。随着海洋物联网相关的传感器及核心零部件的技术,尤其是复杂海洋环境下的数据感知和通信传输技术的突破[14],目前在海洋无人艇上,海洋观测设备采集数据实时回传与实时同步处理技术正在被关注与研究,相关技术也正在被论证,海洋无人艇搭载各类仪器设备的数据采集、数据实时回传与同步处理技术将为海洋观测带来巨大的便利性与实效性,对于构建天基、海面、水下多传感器网络实时通信系统研究具有重要的意义。
