Ka频段大口径测控天线无人机校相方法设计与验证
2021-08-13吴宗清秦明暖严亚龙
洪 宇,吴宗清,门 涛,秦明暖,严亚龙
(1.宇航动力学国家重点实验室,西安 710043;2.中国西安卫星测控中心,西安 710043)
0 引 言
航天测控天线的准确标校是获取在轨航天器高精度测量数据的基础,保证大口径测控天线跟踪精度的重要工作是通过相位校准消除交调影响[1-2]。在航天器进出空间测控和空间操控管理任务中,测控设备按场区有无配置标校塔,可分为两类标校方法:有塔标校和无塔标校。有塔标校[3]方式可操作性强,但受制于工程基建建设,该方法即使能够满足远场条件,但一般仰角较低,易受到周边环境干扰,造成标校误差。无塔标校是指不利用标校塔即可完成设备标校的各类方法,如采用在天线副面架设标校设备、放标定球、指向射电星(大口径)或卫星[4-6]等方式。
随着航天测控技术的发展,Ka频段天线在测控领域已逐步应用[7-8]。Ka频段天线波束较窄、跟踪精度指标要求高,如何开展大口径Ka频段测控天线标校及低轨高动态目标捕获跟踪,是影响新型测控设备效能发挥的关键技术[9-10]。以12 m口径天线为例,由于Ka频段要求的远场测试条件较高,天线远场距离一般需25 km以上,仰角3°时对应的标校塔高度至少需1400 m;即使在1/4远场条件下,仍然需要比天线中心位置高至少350 m的标校塔配合。在没有相应频段卫星配合标校工作时,Ka频段天线的外场指标测试和跟踪相位校准[11-12]较难实现,需采用新的无塔标校方法。
基于以上需求,本文提出了利用无人直升机搭载测控/数传应答载荷构造外部标校环境、开展Ka频段天线测试标校的试验方法,为Ka频段测控天线研制和外场测试提供技术支持和途径。
1 测控天线校相原理
双通道单脉冲跟踪接收机具有设备相对简单、跟踪精度高、角误差解调性能优良、容易实现等优点,在测控系统中得到了广泛应用。测控天线一般配置单脉冲自跟踪接收机,解调输出反映目标偏离天线主波束的方位电压和俯仰电压,驱动天线实时跟踪目标。
但它存在和、差通道幅相不一致引起的交叉耦合以及定向灵敏度变化问题,需要进行定期校正;而且校相结果受设备组合、工作频点、环境温度和极化方向的影响较大,使得校相成为执行任务前不可或缺的工作。图1为双通道单脉冲跟踪接收机原理框图。

图1 双通道单脉冲跟踪接收机原理框图Fig.1 Diagram of angle error demodulation in dual channel monopulse system
在图1中,由馈源产生的和差信号经过各自的低噪声放大器、下变频器变成中频ω1送至综合基带设备,和路信号经过中频采样后,送入FPGA的数字锁相环提取相干载波,经过能量检测单元得到和路的自动增益控制信号。和路的自动增益控制信号送给差路,完成差路信号的自动增益控制。差路信号经过中频采样后,利用和支路载波跟踪结果对差支路信号跟踪,经数字下变频低通滤波,得到两路同相正交信号,对这两路同相正交信号进行数学计算,完成角误差电压的解调。
在跟踪接收机完成角误差解调后,当和差信道相移不一致时,将会引起交叉耦合。所以要通过相位标校解算出移相器的移相值,使和差信道的相移保持一致。
基于无人机的测控天线动态自动校相技术,其基本原理是通过在天线主波束内目标两点的测量,获取天线相对无人机运动前后的误差电压值和相对运动角度,计算出相位校正值和需设定的定向灵敏度。为了实现的方便,一般可借助天线控制单元的程序引导或数字引导功能,当目标进入天线主波束3 dB波瓣范围后,读取一组初始方位、俯仰误差电压UA0,UE0以及天线位置角度A0,E0;然后俯仰向上拉偏一个位置偏置量,再读取一组方位、俯仰误差电压UA1,UE1,以及天线位置角度A1,E1;根据公式,即可计算出通道相移量和D/A板放大输出系数,具体的相位标校原理见文献[3]。
最终,对左旋圆极化波,校相后移相器值为:
Δφ1=
(1)
对右旋圆极化波,校相后移相器值为:
Δφ1=
(2)
定向灵敏度计算公式为:
(3)
其中,需要注意的是,当UA1-UA0=0时,代表天线进行一次拉偏后其误差电压没有变化,导致校相失败。Δφ0为移相器的初始相移量,C0为信号通道初始增益因子,Ce为天线额定定向灵敏度,θ为天线偏置角。此种情况可能会在跟踪接收机上增益系数配置为0时出现,属于配置错误的异常情况,此时应重新调整跟踪接收机上的增益系数,然后再次进行校相。
2 无人机平台试验系统设计
2.1 系统组成与工作模式设计
无人机载试验系统包括无人机平台分系统、地面飞行控制分系统、地面数据处理中心分系统等,有效载荷可根据试验需要灵活加载至无人直升机。
为高效开展测控天线校相工作,本文使用载重量大、续航时间长的无人直升机。并根据试验场景需求,设计了轻量化测控载荷组合模式,可同时挂载1台S频段应答机、2台C/X/Ka频段应答机等载荷,总体布局如图2所示。该设计方案可使飞机避免频繁起降、延长了飞行和悬停时间,利于较长时间开展Ka频段天线的捕获跟踪工作。

图2 无人机搭载载荷组合工作模式示意图Fig.2 Loading figure of combined working mode based on unmanned aerial vehicle
2.2 精度分析
角度精度由RTK定位平面精度和高程精度、差分基站位置平面精度和高程精度、测控天线坐标系转换误差、无人机到测控天线坐标原点基线长度值构成。角度精度可按下式[13]计算:
(4)
式中:σangle为测控天线坐标原点到无人机之间角度精度,σ1、σ2、σ3、σ4、σ5分别为RTK平面精度取±25 mm+1×10-6(10~20 km基线,小于10 km精度更高),RTK高程精度取±50 mm+1×10-6(10~20 km基线精度,小于10 km精度更高)、差分基站平面精度取±2.5 mm+0.5×10-6,差分基站高程精度取±5 mm+0.5×10-6,天线坐标系转换到84坐标系误差取±4 mm,L为无人机到测控天线坐标原点基线。计算可得角度精度分别为±11.56″、±2.3″、±1.16″。
对于测控天线波束宽度(3 dB)为0.1°情况,单脉冲测角体制测角精度按1/10波束宽度计算,测控站测角精度为±0.01°,再按被鉴定标准与标准比对取1/3,需要作为标准比对的角度测量精度小于±12″,当无人机到测控天线坐标原点基线长度为1 km时角度精度为±11.56″,就可满足测角精度鉴定要求,更长的基线则角度精度更高。
采用无人机搭载测控载荷进行天线标校的方法主要误差来源于无人机自身定位精度,高精度GPS接收机实时动态差分定位的精度可达2 cm[14]。其次,还应考虑飞行姿态变化和机载载荷天线与北斗差分天线位置不一致引起的误差[15]。本项目数据处理过程中对无人机系统装载的差分天线与载荷天线、质心惯导位置误差进行了标定,在数据处理过程中扣除该距离引起的误差。试验过程中为减少无人机姿态变化引入的误差,测控天线跟踪并采集数据的航路设计为长距离直线航路,测控天线在无人机爬升与转弯等状态下不跟踪载荷、仅在平飞或悬停状态下进行试验。
2.3 天线口径分析
地球轨道卫星地面站测控设备大多采用抛物面天线,天线口径从4.5~12 m不等,常用的有直径4.5 m、5.5 m、7.3 m、9 m及12 m等多种规格。天线口径大小很大程度上决定了系统的最大功率增益与噪声温度比(gain and noise temperature, G/T值)、等效全向辐射功率(equivalent isotropically radiated power, EIRP)等主要性能指标。口径越大,G/T值和EIRP也越高,接收、发射信号能力强,作用距离就越远。考虑到本文旨在使用无人机进行地面测控天线的相位标校,所以需对不同天线口径下的相位校准链路余量进行分析。
2.1节已提到,要实现Ka频段信号的准确相位校准,需在S校相完成并自动跟踪的基础上进行Ka频段信号的校相工作,所以需综合考虑无人机S及Ka频段机载天线增益。另外,还需考虑地面测控天线G/T值及空间损耗等因素,地面测控天线的G/T值又和天线口径等因素相关,式(5)给出了地面测控天线接收信号功率与噪声谱密度比的计算公式[3]。
(C/N0)r=P1+G1-Lsp-Lr+G/T-k
(5)
式中:P1为无人机S/Ka应答机发射功率,G1为无人机机载S/Ka频段天线增益,Lr为无人机上电缆损耗,G/T为地面接收系统增益噪声温度比(品质因数,dB/K),k为波尔兹曼常数(-228.6 dBW/Hz·K),Lsp为下行空间损耗,空间损耗的计算方法为:
Lsp=32.44+20lgf+20lgR
(6)
式中:f为天线的工作频率(MHz),R为无人机信标至地面测控天线的距离(km)。
2.1节介绍的无人机试验系统中,S及Ka频段应答机的发射功率分别为20 dBm及10 dBm,机载天线增益分别为6 dB及10 dB,无人机上电缆损耗为3 dB,假设无人机与地面测控天线的距离为24 km(12 m口径天线工作于25 GHz频率时的远场距离),S频段的天线工作频率为2250 MHz,Ka频段天线的工作频率为25 GHz,4.5 m、5.5 m、7.3 m、9 m及12 m口径天线的在S/Ka频段G/T值一般为13/32(dB/K)、15/34(dB/K)、18/37(dB/K)、20/38(dB/K)、22/41(dB/K)。基于以上条件,分别计算出不同口径地面测控天线在S及Ka频段校相时的链路余量如表1所示。
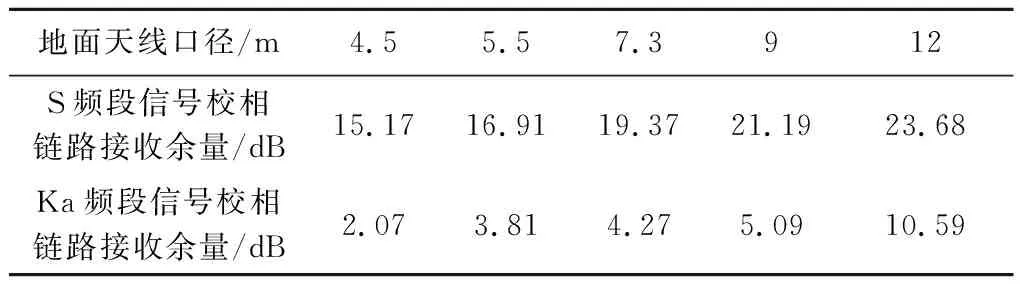
表1 不同口径地面测控天线S/Ka频段校相链路余量计算表Table 1 Link margin calculation sheet of S/Ka phase calibration in different diameters ground TT&C antennas
通过上表可以看出,在现有试验条件下,无人机与不同典型口径的地面测控天线之间的链路余量在S及Ka频段均满足校相需求,但若地面测控天线的口径继续减小,在进行Ka频段相位标校时的链路余量可能不能满足地面测控天线的G/T值指标。
3 基于无人机平台的测控天线校相方法
3.1 试验方法设计
无人机飞升高度根据远场条件公式L≥2D2/λ和地面天线仰角进行计算,L为待测天线点位与无人机在地面投影点位的直线距离,D为天线口径直径,λ为波长。
本节试验基于12 m口径地面测控天线工作于26.9 GHz频率的条件下进行,计算得出Ka频段远场距离与无人机飞行高度的对应关系如表2所示。

表2 Ka频段远场距离和无人机飞行高度对应关系Table 2 Correspondence between Ka-band far-field distance and UAV flight altitude
为满足Ka频段天线的远场条件及3°以上跟踪仰角,任务前需要对无人机的飞行航迹进行合理设计[16],并设定3个以上悬停点,用于Ka频段天线的捕获。图3给出了规划后的无人直升机典型任务剖面。无人直升机从海拔500 m高度起飞,前出13 km,爬升至相对高度1100 m,飞行至距待测天线10 km的任务区域执行任务,跟踪仰角6.3°,执行任务期间飞行速度不超过25 m/s,任务时间2 h,任务完成后返航。

图3 无人机典型任务剖面图Fig.3 Typical mission profile of unmanned aerial vehicle
3.2 试验步骤
进行Ka频段测控天线快速校相时,测控天线需在S频段自跟踪条件下叠加偏置进行;同时,无人机下传至地面测控设备的信号电平应满足设备载波捕获跟踪的灵敏度门限要求,且无人机与测控天线间应无遮挡。Ka频段自动校相测试流程如图4所示。

图4 无人机悬停测试Ka频段自动校相流程图Fig.4 Diagram of Ka-band automatic phase calibration test
试验过程如下:
1)预先完成S频段天线(2300 MHz)跟踪相位的校准;
2)无人机升空至航路设置的预定悬停位置,控制信标源开启,发射S/Ka频段待测频点单载波信号;
3)调整天线指向,信标进入S频段天线波束后,启动S频段天线自跟踪;
4)待跟踪稳定后,微调无人机飞行高度使天线俯仰角度为6°;
5)退出S频段天线自动跟踪模式,天线控制单元启动S+Ka频段天线自动校相流程,完成S+Ka频段天线自动校相;
6)完成自动校相流程后,开启Ka频段天线自跟踪;
7)待Ka频段天线跟踪稳定后,保持俯仰自跟踪,控制方位轴分别拉偏±0.005°、±0.01°、±0.015°、±0.02°、±0.025°、±0.03°,记录天线方位和俯仰误差电压;
8)保持方位轴自跟踪,控制俯仰轴拉偏±0.005°、±0.01°、±0.015°、±0.02°、±0.025°、±0.03°,记录天线方位和俯仰误差电压;
9)由第1节中的式(1)或(2)即可求出本次校相的方位和俯仰所需移相值;
10)由第1节中的式(3)即可求出本次校相的定向灵敏度;
11)每次进行天线拉偏时,可通过观察方位/俯仰角发生变化时引起俯仰/方位误差信号的变化量,从而求出本次校相的交叉耦合。一般天线控制单元可自动完成校相交叉耦合结果的计算及显示。
3.3 校相试验验证
使用无人直升机标校系统在联试场与12 m口径测控设备进行了校相试验,由于无人直升机悬停时间长、悬停位置精度高,每次悬停时长可达1 h以上。在第一个悬停点,即俯仰6.3°时采用S(波束宽度0.38°)自跟踪基础上叠加适量偏置,即可使目标落在Ka频段波束宽度(0.06°)内且趋近波束零点。经过多个架次飞行试验验证,Ka频段可实现稳定自跟踪、且校相成功,同时进行了S、Ka频段电轴一致性测试,测试结果如图5所示,具体结果如表3所示。
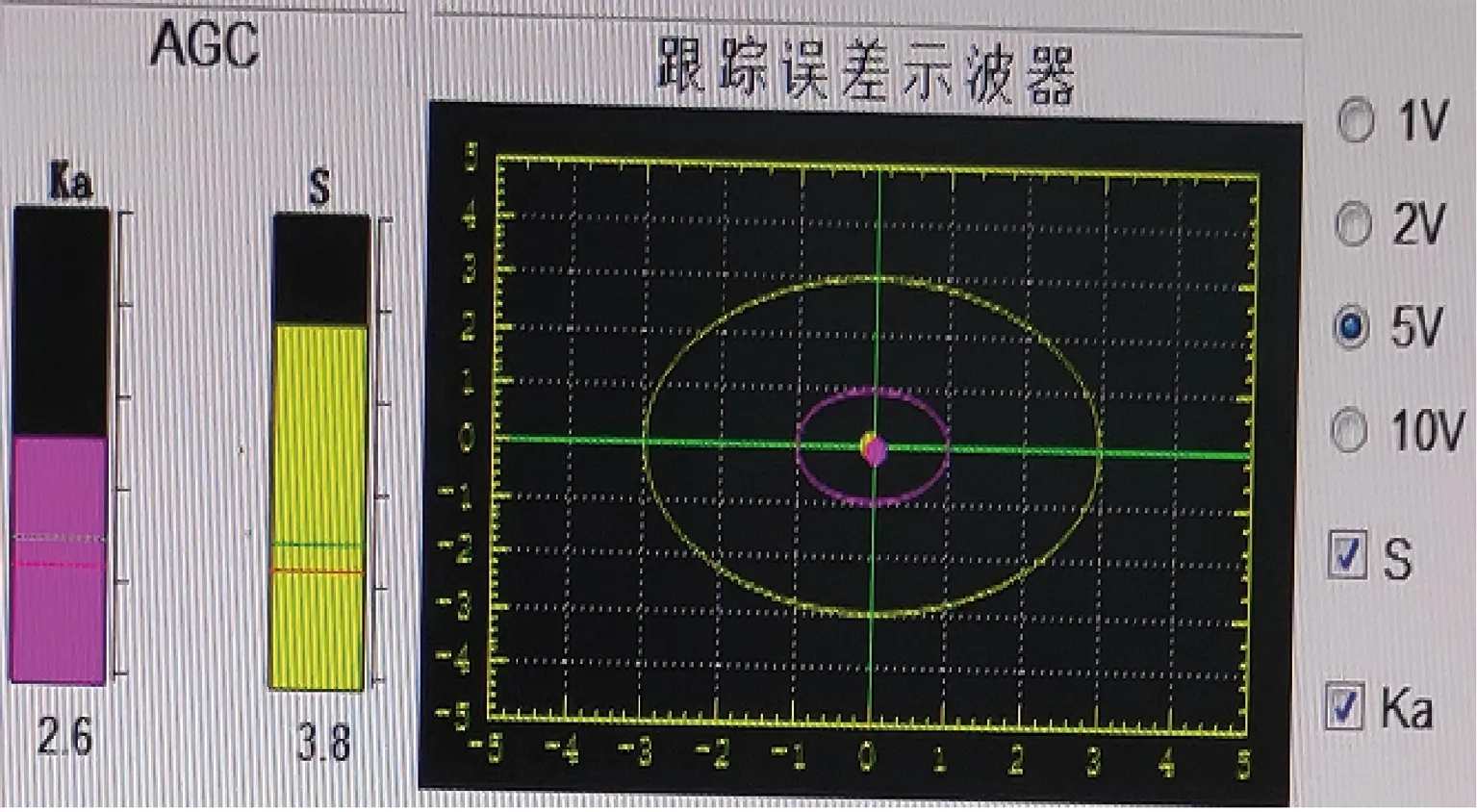
图5 无人机测试Ka频段自动校相结果示意图Fig.5 Schematic diagram of Ka-band automatic phase calibration results
通过表3可以看出,采用文中提出的无人机平台、校相算法及测试方案,可以成功完成地面测控天线Ka频段的相位标校工作。每次相位标校得出的交叉耦合和灵敏度系数指标均满足天线对无人机信标的闭环自跟踪要求,用时基本在1 min之内,能够做到快速校相。

表3 对无人机的校相结果统计表Table 3 Statistical table of the calibration results of UAV
试验结果满足设备指标测试及任务自检要求,表明了直升机挂载载荷进行Ka频段天线标校的可行性,可作为大口径测控天线的标校手段。
4 结 论
本文提出了基于无人直升机的Ka频段测控天线校相方法,对比了新方法与传统标校塔方法的优缺点,分析了无人机平台的系统组成、载荷组合模式及数据精度。通过分析天线校相原理,设计了飞行航路及试验方法,多个架次的飞行试验结果表明无人直升机载重量大、悬停时间长,可实现Ka频段测控天线稳定自跟踪和相位校准。
该方法为高频段大口径测控天线测试和标校提供了新思路,无人机直升机平台作为移动的标校塔,可灵活构造外部试验环境、不受地理条件限制,测控设备天线仰角较标校塔仰角更高,测控频段和工作模式可以根据任务需要实时遥控配置,方位、俯仰、距离通过无人机航路设计保证,有利于提高标校精度,能够取得理想的标校结果。缺点是无人直升机飞行过程中姿态变化、载荷与差分天线位置不一致引入了新的误差,但可通过精确标定和数据处理方法消除姿态及位置误差。
综上所述,本文提出的无人机校相方法在深空测控、天线组阵、大口径高频段测控数传天线等新型航天测控装备的标校测试领域具有工程应用前景,可作为主用校相方法确保完成重要测控任务。
