实时超声-X线透视图像融合技术研究及应用进展
2021-08-12杨明雷王文馨袁红美
钱 山,杨明雷*,黄 峰,王文馨,袁红美
(1.沈阳东软智能医疗科技研究院有限公司,辽宁 沈阳 110179;2.东软医疗系统股份有限公司,辽宁 沈阳 110167)
心脏介入主要用于诊断和治疗心血管疾病,具有创伤小、术后恢复快等优点[1-2],其安全性和有效性已获临床证实[2-3]。X线透视成像是引导心脏介入操作的主要影像学方法之一,视野广,可清晰显示在体导管、瓣膜和起搏电极等结构[4];其主要不足为对人体有辐射,且仅能提供2D影像,不能清晰显示在体软组织[5]。超声检查安全无创,可对在体软组织清晰成像[6-7];3D超声心动图不仅支持心脏容积成像,还能提供目标结构的立体3D视图,辅助医师全面了解心脏内部结构信息[8-9],但其成像范围窄,易受呼吸等移动影响而产生伪影[10]。X线透视成像与超声优势互补,临床广泛联合应用二者辅助引导心脏介入操作[11],但因缺少能够同时显示上述两种图像的方法,操作时需以多个屏幕同时显示,且需操作人员高度配合协作[12]。实时超声-X线透视图像融合技术能够有效解决上述问题,支持3D精准可视化复杂心脏结构[4,13-16]。本文对实时超声-X线透视图像融合技术研究及应用进展综述。
1 医学图像融合技术基本步骤
医学图像融合技术旨在融合不同成像模式,以充分挖掘影像学信息[17]。多模态融合成像技术包括图像预处理、图像配准及图像融合显示3个基本步骤。
1.1 图像预处理 指对获取的医学图像进行几何校正、噪声滤除及图像分辨率统一等操作,还可根据不同目的建立数学模型,保留和恢复图像的基本特征,以突出重要信息,为后续图像处理做准备[18-19]。目前常用医学图像预处理方法包括离散小波变化和基于深度学习的方法等[20]。
1.2 图像配准 基于一幅医学图像寻找恰当的空间变换,在空间上建立其与另一幅图像中对应结构点的对应关系,主要包括提取空间特征、空间变换、插值、相似性测度和搜索策略优化5个步骤,可辅助医师获得病灶病理信息与解剖结构的互补信息,对临床诊治疾病具有重要意义[21]。图像配准与图像融合关系密切,配准是融合的先决条件,融合是配准的目的之一。待融合图像多来自不同影像学设备,在成像原理、方位和分辨率等方面可能存在较大差异,使得图像配准精度直接关系到图像融合效果。通过配准可充分挖掘多模态图像的信息,提高数据利用率。
1.3 图像融合 医学图像融合技术可充分利用不同类型的医学图像,根据对象不同,融合方法可分为像素级和特征级[22]。像素级图像的融合原理是通过对两幅图像对应像素点的灰度值加权求和、灰度取大/小等操作创建融合图像。特征级图像融合指在提取特征、分割目标等操作后进行图像融合,其算法复杂,实时显示效果较理想。目前常用图像融合显示技术包括加权平均法、多分辨率金字塔法、小波变换法、主成分分析法及神经网络法等[23]。
2 EchoNavigator导航系统和Artis zeego C臂系统
EchoNavigator导航系统和Artis zeego C臂系统是两款主要实时超声-X线透视图像融合产品,二者技术路线不同,但设计思路类似,均利用超声和X线透视成像的优势,通过算法自动实时融合多模态图像,以可视化复杂的心脏结构。
2.1 EchoNavigator导航系统 能够实时融合并显示靶部位的经食管超声心动图(transesophageal echocardiography, TEE)和X线透视图像,辅助医师了解病灶结构[2]。其具体操作步骤如下:①启动TEE和X线透视图像采集装置,通过TEE确定病灶及周围软组织解剖结构,并在重要解剖结构处以“点”或“叉”标记参考点[4];②通过校准算法定位和追踪TEE探头位置和方向,进行空间配准并融合TEE与X线透视图像[12];③在同一坐标系中同步显示TEE、透视图像、融合图像及超声标记的参考点(图1)[2,24];④自动跟踪透视C臂运动轨迹,并以相同角度实时更新和重建融合图像[25];⑤医师根据融合图像确定病灶,明确手术设备移动路径并进行手术[5]。
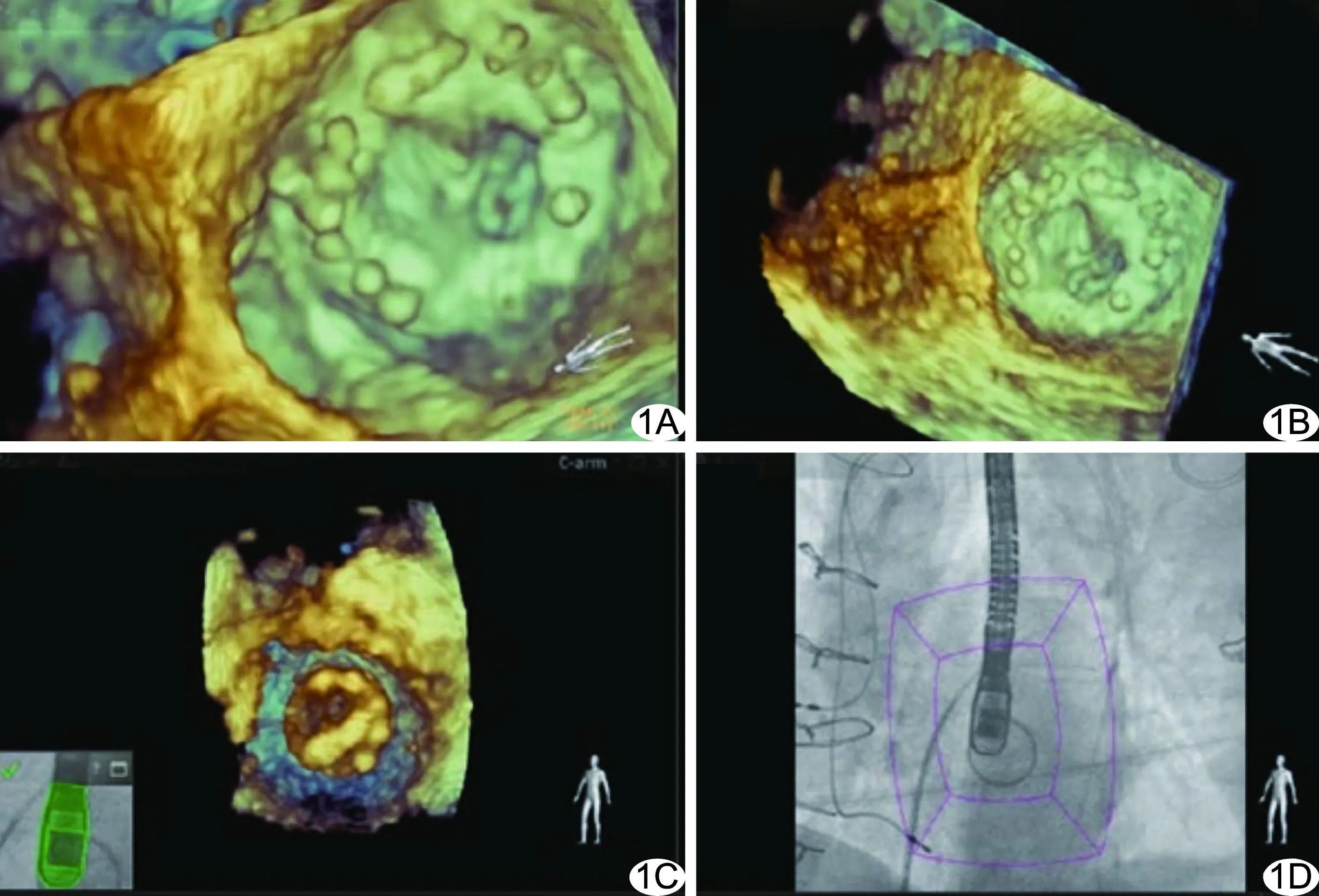
图1 以二尖瓣假体渗漏闭合手术为例,EchoNavigator导航系统显示界面[2] A.自由视图,介入医师自行决定图像视角; B.超声心动图视图; C.龙门C臂架实时透视投影对应的3D TEE图像; D.X线透视图像
目前EchoNavigator已用于成人经皮导管主动脉瓣置换(transcatheter aortic valve replacement, TAVR)[2,26]、房间隔缺损(atrial septal defect, ASD)闭合[27]、椎旁渗漏(paravalvular leaks, PVL)闭合[28]、房间隔穿刺(transseptal puncture, TSP)[3,5]、经导管二尖瓣修复(transcatheter mitral annuloplasty, TMA)[28-29]及左心耳封堵(left atrial appendage closure, LAAC)[11]等多种心脏介入操作。其中TAVR术主要采用EchoNavigator观察和标记主动脉瓣环,术中TEE标记的主动脉瓣环标记点可自动转换并实时显示于透视图像中,辅助医师判断导管引导路径、评估假体植入深度[2,26]。ASD闭合术中,EchoNavigator图像融合智能标记技术可有效确保术中导管正确的穿孔通道和靶方向穿过隔膜,有助于精确放置手术设备及材料[27],使医师可在不使用对比剂的情况下开展ASD术,提升了操作安全性[4]。TMA术中,EchoNavigator支持心房结构可视化,智能标记跨隔穿刺部位,辅助医师规划、纠正导管置入轨迹[29]。LAAC术中采用EchoNavigator可显著提高导管、导丝及心脏解剖结构的可视化程度,缩短操作时间,降低辐射剂量[30]。
2.2 Artis zeego C臂系统 利用SiemensArtis zeego C臂系统可将术前超声心动图、心脏3D几何模型和术中2D冠状静脉X线透视图像融合为一幅图像,用于引导放置用于心脏再同步治疗(cardiac resynchronization therapy, CRT)的左心室导联[13]。以阴极射线管超声引导左心室放置低压引线为例,图像融合工具的工作流程分为CRT术前和术中两部分[13]。术前首先以超声获得心脏几何信息,构建个体化平均3D心脏几何模型(基于超声参数按比例调整平均3D心脏几何模型参数),辅助显示左心室功能;之后基于超声斑点追踪技术计算左心室心肌应变,并绘制基线应变曲线,量化显示心肌功能;医师以盲法回顾性分析基线应变曲线,定义并标记导联放置的目标心肌节段(径向应变最晚达到峰值的心肌节段)。术中首先基于冠状静脉造影获得X线透视图像;之后将3D心脏几何模型与X线透视图像进行配准,系统自动、动态追踪C臂运动信息,实时融合并显示图像,以综合评估心肌功能及冠状静脉情况、选择目标冠状静脉节段并引导左心室导联至目标冠状静脉;最后基于融合图像调整起搏电极至超声定义的目标心肌节段并放置左心室导联。
一项回顾性研究[13]分析30例患者常规CRT术中2D X线透视图像及术前超声心动图,以真实临床结果为标准,对比分析Artis zeego C臂系统的应用效果,结果表明其3D心脏几何模型与X线透视图像的配准时间和准确性均符合临床要求,其中20例导联放置位置与超声定义的心肌节段的一致性良好。目前该图像融合工具仍处于科研阶段,尚未应用于临床。
3 小结与展望
心脏介入操作中,实时超声-X线透视图像融合技术可充分发挥两种成像技术的优点,不仅能清晰显示手术器械及解剖结构,且可显著降低辐射剂量,提高治疗有效性及安全性。
EchoNavigator适用于引导介入操作中设备放置和显示及标记目标部位,加强超声科医师和介入医师的沟通合作,简化导管导航和设备放置流程。为正确、有效地使用该技术,不仅需要医师充分了解两种成像模式下心脏结构的呈现形式,且需采集高分辨率超声心动图和透视图像,对医师和图像采集设备均提出了更高要求。Artis zeego C臂系统集成的多模态图像融合工具,可进一步简化介入操作流程[13],且能提供超声所示目标位置与静脉解剖结构之间的空间关系,有助于精确输送起搏电极。目前该工具虽然尚处于研究阶段,仅在单中心进行验证试验,且纳入样本量有限,有待继续观察,但其临床应用前景广阔,发展空间巨大。
