基于惯性/组合导航系统级故障诊断方法研究*
2021-08-12徐景硕嵇邵康
徐景硕 安 阳 嵇邵康
(海军航空大学青岛校区 青岛 266041)
1 引言
惯性导航系统(INS)作为一种全方位的自主式导航系统,它不受外界条件和环境的干扰,隐蔽性好[1],在工业和军事领域得到广泛应用。尽管惯导系统导航信息精度高,但它的算法是一个积分过程,误差容易随时间积累,不满足续航时间长的飞行载体的要求。GPS系统精度较高,但使用权受制于人,而且它易受环境的影响,只能用做载体的辅助导航[2]。随着装备飞机导航系统的增多,通过SINS与其他系统的组合,可以解决其误差随时间积累的问题,输出更全面的导航信息,满足未来战机的需求;但由于装备载体系统的增加,故障发生的概率变大,当某一系统发生故障后会影响其他系统,系统整体的容错性下降。
为了解决以上问题,本文分两步来实现具有容错性的组合导航系统。首先设计一个无重置结构的滤波器,然后在子滤波器的输出后增加故障检测模块,用状态χ2检验法和残差χ2检验法[3]对故障进行检测,并比较它们的检测效果。
2 系统方案设计
2.1 具有故障检测功能的SINS/GPS/ADS/MG组合导航系统结构
为提高系统的容错性和计算能力,设计一个无复位结构的联邦滤波器[4],对惯导、卫星导航、大气机、磁航向仪四种导航信息融合。其导航系统结构如图1所示。

图1 基于联邦滤波的容错组合导航结构图
该系统是以惯导为参考系统,将它与其他系统对同一导航参数的差值给子滤波器。各滤波器独立计算,互不影响,在同一时刻将结果给主滤波器[5]。主滤波器做融合计算,得到最终的估计值。在此基础上,给每个子滤波器的输出加上故障检测模块,用它来检测系统是否发生故障,以决定子滤波器量测信息是否有效。当诊断出某一子系统发生故障,主滤波器不接收其输出,重组剩余的系统,保证整体系统的正常工作。
2.2 信息融合方法
1)信息分配原则
为了合理地分配惯导信息,使不同性能的子滤波器精度均令人满意,将系统的过程信息Q-1和P-1按以下原则在主滤波器和子滤波器之间分配[5]:

系统满足信息守恒定理:

2)系统算法原理
(1)各子滤波器滤波过程包括两步[6]。
①时间更新

②量测更新

2)假设一共有N个子滤波器,主滤波器融合算法为

2.3 故障诊断方法
2.3.1 状态χ2检验法
状态χ2检验法是通过两个不同的估计值之间的差异判断系统是否发生故障[7]。第一个状态估计值X1(k)是经过Kalman滤波计算得到的,第二个状态估计值X2(k)是由上一时刻的估计值递推计算得到的预测值。
定义估计误差e1(k)和e2(k)为
并定义:

当系统正常时,β(k)的均值为0;当系统出现故障时,β(k)Tk的均值不为0。因此,通过对β(k)均值的检测便可判断系统是否发生了故障。
利用统计学及二元假设的理论,可以推导得到以下故障检测函数:

式中,λk服从自由度为n的χ2分布。
故障判定准则为

其中,TD是设定的门限,合理地选取门限可以使系统的漏检率最小。
2.3.2 残差χ2检验法
为了减小故障检测算法的计算量,提高计算效率[7],以下介绍一种残差χ2检验法来对故障进行检测。它的检测思路是通过对量测值和预测值(k/k-1)之间的差值d(k)(残差)是否满足零均值高斯白噪声来判断系统是否发生了故障[7]。
首先由k-1时刻得到k时刻状态的预测值为

由状态的预测值得到量测的预测值为

两者的差值即残差值为

当系统正常时,残差的均值为0;当系统出现故障后,其均值不为0。
同状态χ2检验法类似,残差χ2检验法的故障检测函数为

其中,λd(k)是服从自由度为m的χ2分布,即λd(k)~χ2(m)。m为测量Zk的维数。
故障判定准则为

3 仿真验证
以SINS/GPS为例,在GPS的量测值上设置故障,比较状态χ2检验法和残差χ2检验法对故障的检测效果。
3.1 仿真条件
1)门限的设置
状态χ2检测中取误警率α=0.005,设置的门限值如下:GPS/SINS:。
残差χ2检测中取误警率α=0.05,设置的门限值如下:GPS/SINS:。
2)故障的设置
在各子系统的量测值上设置两种故障:一种是突变的故障[8],即在各量测值上加入比实际误差扩大10倍~20倍的常值偏置;另一种是缓变的故障[8],可以用一阶或二阶的信号来表示。
3.2 仿真结果
检测的结果如表1和图2所示(*号表示存在漏检,0表示无故障,1表示有故障)。
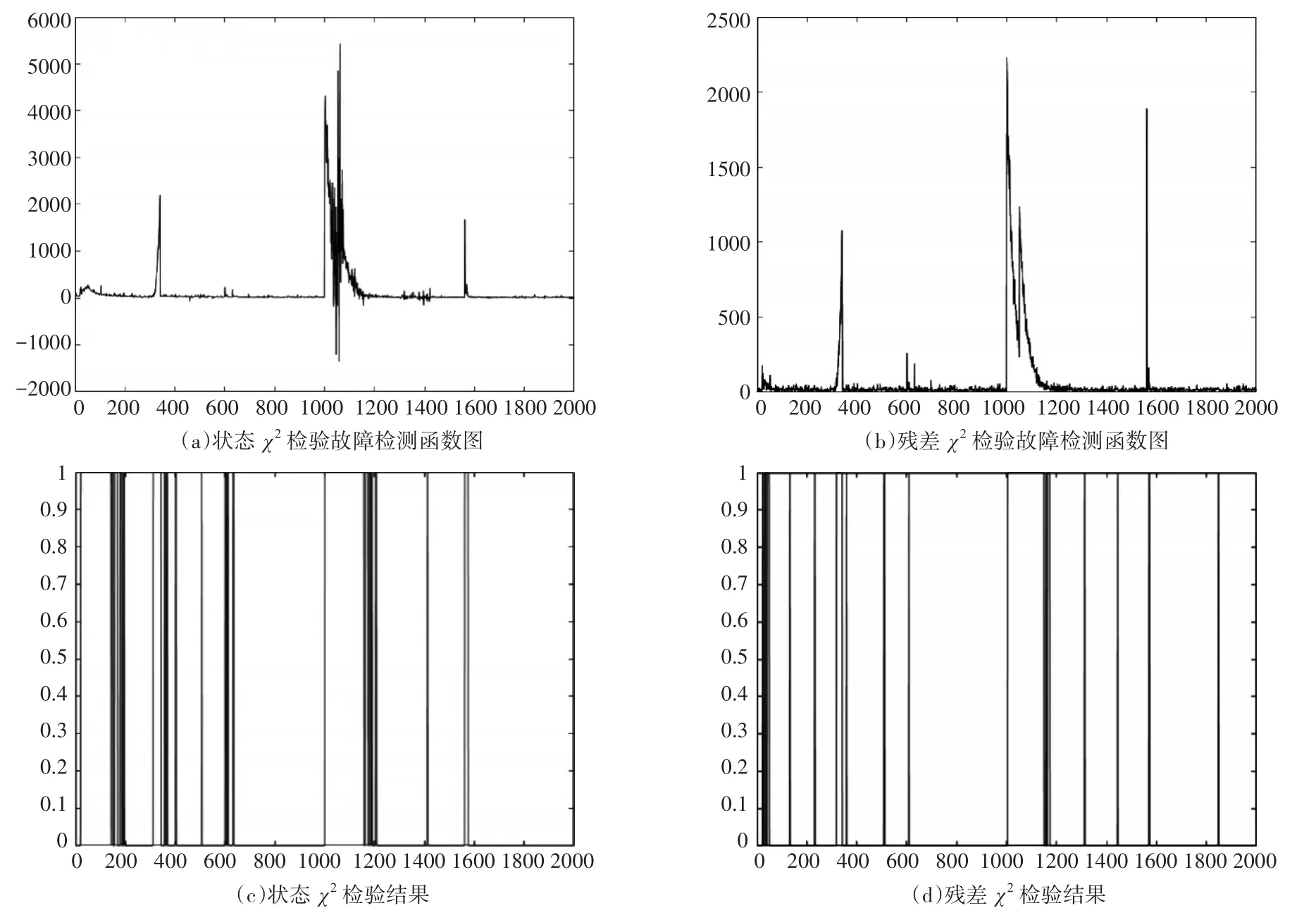
图2 故障检测曲线
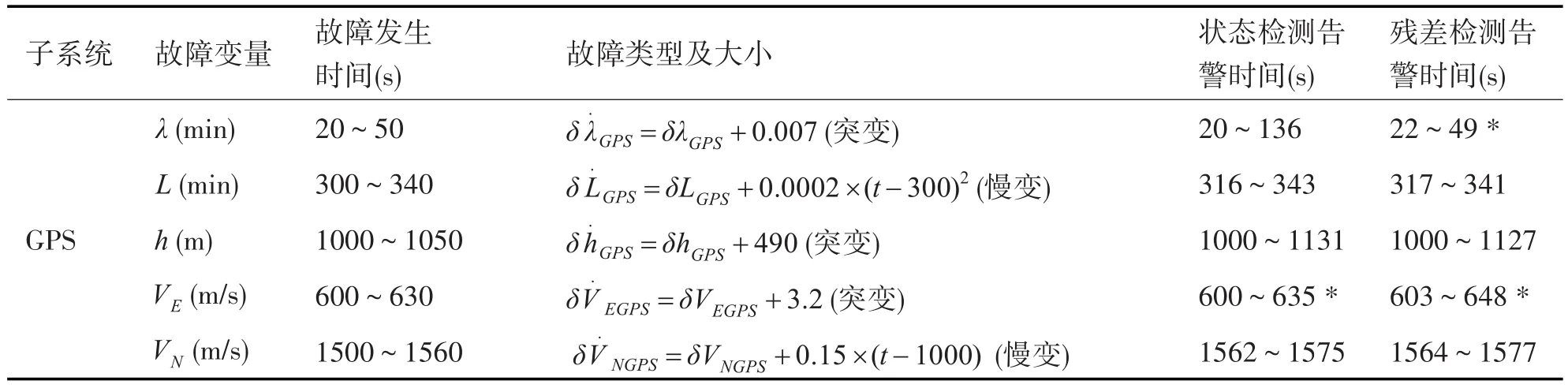
表1 对子系统故障的设置及检测结果
3.3 仿真结果分析
状态χ2检验法和残差χ2检验法均可有效地检测出故障[9]。状态χ2检验法较为灵敏,当系统发生故障时能快速检测出故障,当它在告警开始和告警结束中间延迟较大,且随着时间增加,灵敏度有所下降。残差χ2检验法告警延迟小、计算量小,但它在中间阶段存在漏检的情况[10],而且它对软故障的检测效果不好。
4 结语
本文首先用无复位联邦滤波结构设计组合导航,以提高系统的容错性和计算速度。然后针对系统常见的两种故障,对其检测方法进行了研究。通过比较状态χ2检验法和残差χ2检验法,得出状态χ2检验法对两种故障的检测效果都很好,但由于系统噪声、初值误差的影响使状态递推器误差扩大,后期故障检测效果降低[11]。相比状态χ2检验法,残差检验法χ2对故障检测效果更灵敏,计算量小,但是其对软故障的检测效果不好,而且存在漏检的情况。综合来看,在实际的应用中,可以综合传统的两种方法或者对现有的检验方法改进,弥补它们在实际应用的困难。对于状态χ2检验法,可以增加一个状态递推器,通过选取合适的周期用Kalman滤波器来重置两个状态递推器,避免已受污染的状态递推器污染整个系统[12]。此外,对于缓变故障的检测,可以对残差χ2检验法改进,在故障发生的早期,及时提取故障的特征[13],及时地检测并排除故障,优化系统重组的流程,提高系统整体的容错性。