无桥有源功率因数校正系统软启动方法研究*
2021-08-12夏益辉张俊洪陈珞珈
刘 洋 夏益辉 张俊洪 陈珞珈
(海军工程大学电气工程学院 武汉 430033)
1 引言
随着手机、笔记本和电动汽车等广泛用于人们的日常工作和生活,人们对其充电装置的要求也越来越高,而功率因数校正PFC(Power Factor Correc⁃tion)变换器作为这些充电装置的重要组成部分,正在朝着高效率、高功率密度和高可靠性等方向发展。
为了提高有源功率因数校正系统的运行性能,国内外很多专家学者对其进行领了深入研究与分析。与传统基于整流桥的Boost PFC变换器相比,无桥PFC不需要整流桥,降低了损耗[1]。图腾柱式PFC具有与无桥PFC相同的功率器件[2],其利用MOSFET自身的体二极管续流,造成反向恢复损耗,不适合采用电感电流CCM控制模式[3]。为了降低反向恢复损耗,提出了多种有源功率因数校正拓扑结构和控制方法[4~11]。但是,这些拓扑结构都需要检测输入电压正负极性,使得系统成本增加和控制复杂。
无论无桥PFC还是传统基于整流桥的Boost PFC,其在起动时都不可避免地会产生冲击电流,为了降低冲击电流,确保功率器件安全,很多文献提出在主电路中串联限流设备如温敏电阻或温度系数装置等,虽然能够降低起动电流,但会造成系统效率降低和成本增加。部分文献通过在负载电流流通路径串联电容来减小Cuk、Seopic和谐振型PFC等变换器的起动电流,同样存在降低起动电流有限、无源器件增加、效率降低和成本增加的问题[12~16]。为此,文献[17~18]提出一种新型谐振PFC变换器,无需整流桥且具有一定的抑制起动电流的能力,但其只适用于小功率无桥PFC系统,降低其应用范围,同时由于系统起动过程中,直流侧电压上升速度与起动电流以及系统动态响应存在一定的矛盾,对于电流控制策略缺少详细的论述,抑制起动电流能力仍须进一步提升。此外,文献[19~20]对有源功率因数校正系统也进行了分析。
本文首先分析了谐振型PFC变换器的基本工作原理;其次,探讨了谐振电路参数设计的基本原则及减小起动电流的工作原理;再次,对谐振无桥PFC变换器双闭环和前馈补偿控制方法进行了研究,重点探讨了参考输入电流限幅设计进行了分析;最后对双闭环和前馈补偿控制通过引入参考输入电流限幅用于谐振无桥PFC变换器的运行性能进行了仿真研究与分析。仿真结果表明对双闭环和前馈补偿控制通过引入参考输入电流限幅,可以有效降低起动电流,同时对输入电流谐波和输出电压纹波系数具有一定的抑制效果,仿真结果与理论分析基本一致,证明了理论分析是正确的和所提方法是可行的。
2 谐振PFC变换器基本结构和工作原理
2.1 基本结构
图1(a)、(b)分别为传统无桥和谐振无桥PFC电路,传统无桥PFC电路由滤波电感L、支撑电容C、方向二极管D1、主电路功率器件D3、D4和S1、S2组成,谐振无桥PFC电路在传统无桥PFC电路上,增加了一谐振电路,由谐振电容Cr、谐振电感Lr和续流二极管D2组成。其中,滤波电感L用于滤除高频谐波电流,功率管S1和S2用于实现泵升,二极管D1用于确保电网向支撑电容C和负载供电以及避免储能向电网倒灌,谐振电容Cr用于降低起动电流,其和谐振电感Lr和二极管D2用于在每个开关周期将电容Cr储能释放。由文献[17,18]可知,当谐振频率fr低于开关频率fs时,系统功率损耗较小,因此,本文基于谐振周期小于开关周期的软起动方法进行分析。
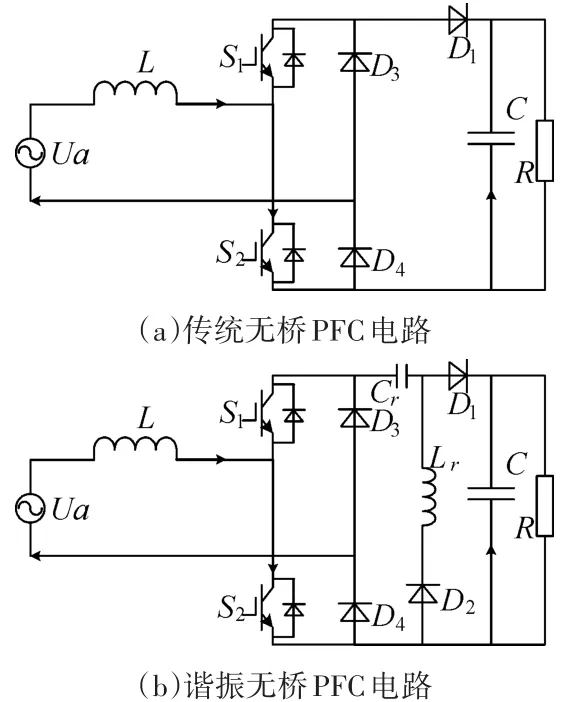
图1 谐振PFC变换器基本结构
2.2 工作模式和升压原理
1)工作模式
与传统无桥PFC变换器相比,谐振型无桥PFC变换器无需输入电源Ua极性判断,功率管S1和S2驱动信号相同。图2为调制模式和输入电流、谐振电流波形。图中ton、toff分别为一个开关周期Ts内的导通时间和关断时间。
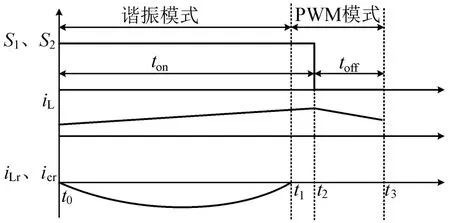
图2 调制模式和输入电流、谐振电流波形
假定输入电压极性上“+”下“-”,谐振型无桥PFC变换器工作状态如图3(a)、(b)和(c)所示。
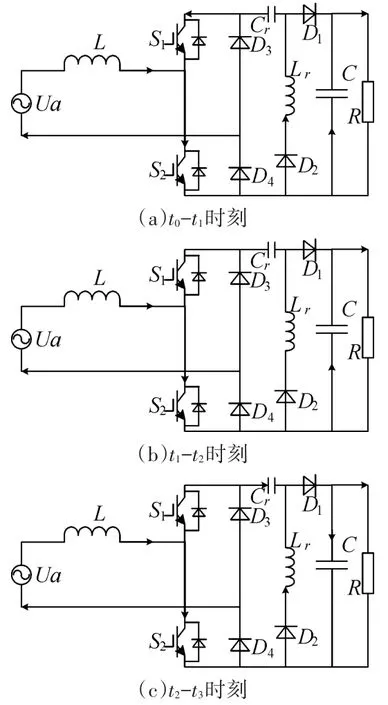
图3 谐振型无桥PFC工作状态
t0-t1时刻:S1和S2导通,Ua经L、S2和D4形成回路,L开始储能;电容Cr两端电压经S1、S2、D2和Lr形成放电回路,在t1时刻,谐振支路icr电流为0;负载由电容C供电。电压方程如下:

t1-t2时刻:S1和S2继续导通,电感L继续储能,同时谐振支路停止放电,Vcr=0。电压方程如下:

t2-t3时刻:S1和S2关断,电感L储能和输入电源Ua共同向电容C充电和负载供电。电压方程如下:

2)升压原理
谐振型无桥PFC变换器工作在两种模式:谐振模式和PWM模式,由图2、图3可知,功率管开通时储能、关断时向负载供电和电容C充电,因此,其升压原理与Boost变换器相同,输出电压Ucd与输入电源电压Ua之间的关系如式(4)所示。

其中,D为占空比,D=ton/Ts。
3 谐振电路参数设计
3.1 起动电流影响因素分析
图4(a)、(b)分别为传统无桥和谐振无桥PFC等效起动电路。假定输入电源上“+”下“-”,忽略负载电阻R影响,此时可知起动电流表达式为
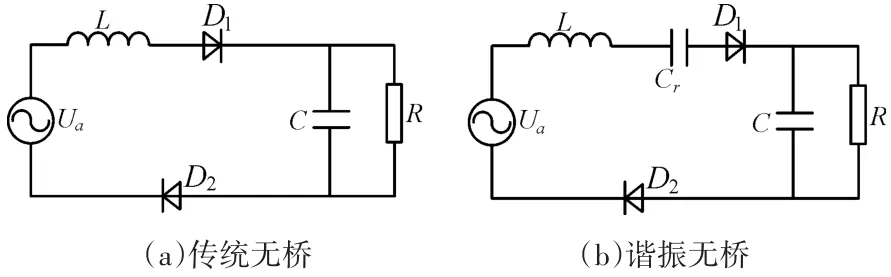
图4 有无谐振无桥PFC等效电路

为了减小起动电流,在传统无桥PFC电路上,增加了谐振电路,如图1(b)所示。由于C>>Cr,线路中由电容引起的容抗由谐振电容Cr决定,等效电路如图4(b)所示,图中同样假定输入电源Ua上“+”下“-”,此时起动电流表达式为

由上式可知,与传统无桥PFC电路相比,串联谐振无桥PFC电路的起动电流明显减小。
3.2 谐振电路参数设计
由式(6)可知,可以通过减小谐振电容Cr和增大滤波电感L来减小输入电流,但滤波电感增大会增大系统体积和成本且对系统稳定性也有影响。振电容与其电压峰值Vcrmax之间关系如式(7)所示[17]:

由式(7)可知,谐振电容大小与其耐压值密切相关:Cr值小,起动电流小,但尖峰电压大,要求电容高耐压;Cr值大,起动电流大,尖峰电压小,电容耐压低。此外,谐振电容受谐振频率影响,必须满足如下关系:

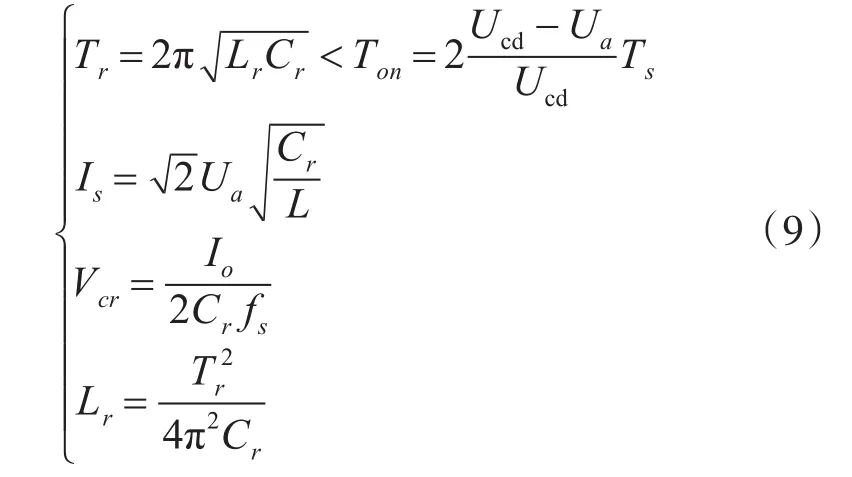
由此可知,谐振电容主要受谐振频率、电容电压峰值和最大起动电流影响,因此,谐振电容和电感参数时应满足如下约束条件。
4 双闭环和前馈补偿的改进控制策略
谐振电路虽然可以有效降低起动电流瞬时大小,但在直流电压上升过程中,直流电压上升比较缓慢,加之滤波电感存在储能,使得系统电压上升过程中,不可避免地会产生过电流现象。为了有效抑制直流侧电压上升过程中过电流的产生,对基于电压电流双闭环和前馈补偿的控制策略进行了改进:电压环输出参考电流进行限幅。图5为基于电压电流双闭环和前馈补偿的无桥PFC电路软起动控制策略。
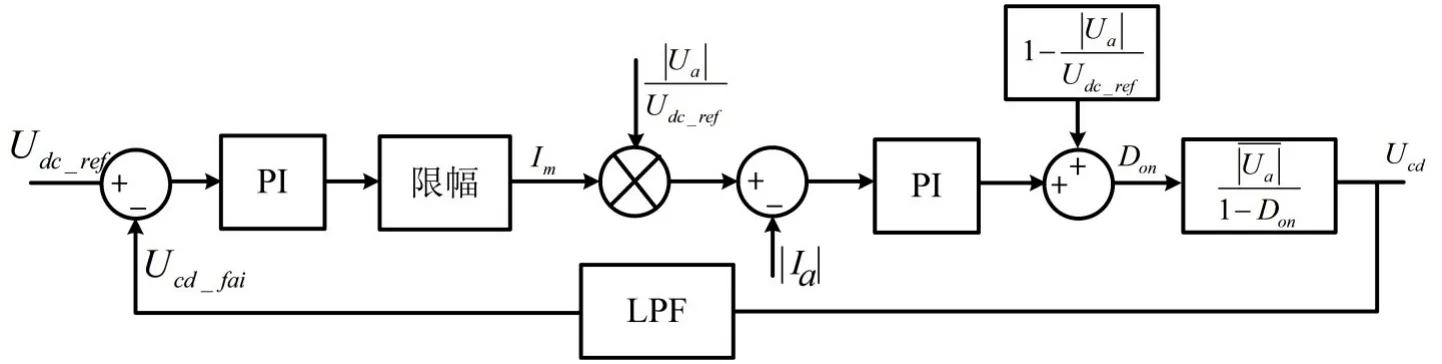
图5 双闭环和前馈补偿改进控制框图
图中由于直流侧电压存在波动,为了提高系统稳定性,对直流侧采样电压进行低通滤波处理之后再进入电压闭环控制;谐振PFC变换器不需要输入电压极性检测,因此参考输入电流采用单位输入电压绝对值与电压环输出电流幅值相乘作为参考电流,参考电流与采样输入电流的差值经PI控制器作为功率器件的导通时间,并将其与前馈补偿1-abs(Ua)/Udc_ref之和作为最终占空比。
对于限幅控制,可根据系统功率和起动电流允许值进行设计。为了减小起动电流和确保系统迅速正常工作,同时兼顾系统电磁兼容要求,忽略功率损耗,由输入输出功率守恒得:

功率器件电流选择时,通常选取为系统电流的1.5倍左右,为了保证系统具有较快的动态响应速度、确保系统无过流现象发生和考虑PFC电路起动时间比较短的特点以及功率器件安全可靠工作,参考电流限幅选取为功率器件额定电流之下,即Iim≤1.5Io。
5 仿真验证
利用Matlab软件搭建了额定功率PN=4kW谐振型无桥有源功率因数校正系统仿真模型,具体参数设置见表1。
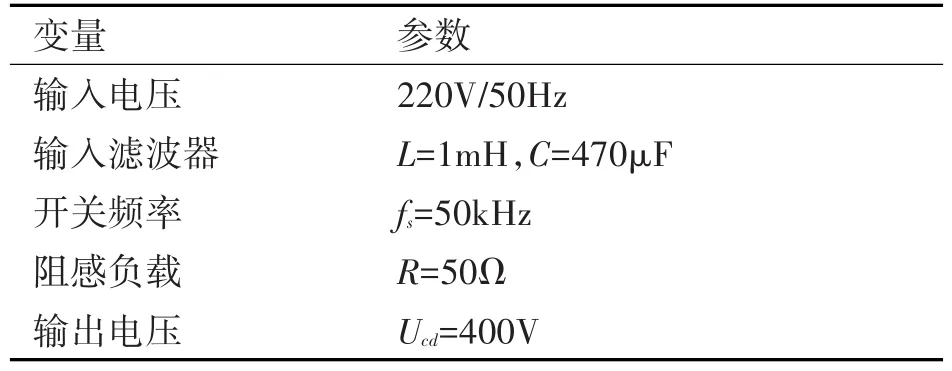
表1 无桥PFC电路参数
将Ucd=400V,Ua=220V,fs=50kHz,代入式(8)得fr≥ 55.5kHz,取谐振频率fr=60kHz。谐振电容Cr两端电压Vcr不超过直流侧电压的10%,系统最大起动电流应根据功率器件最大过流能力和时间来确定,选取为功率器件额定电流以下或系统电流1.5倍以下,由此式(11)成立:
由此可得 2.25μF≤Cr≤4.64μF,取Cr=3.3μF,谐振电感Lr=2.13μH。
图6、图7分别为传统无桥PFC系统双闭环和前馈补偿参考输入电流无限幅和有限幅控制时的输入电压、输入电流和直流输出电压波形。由图6和图7可知,参考输入电流无限幅和有限幅控制时,系统启动电流均较大,无限幅控制时启动电流峰值达到190A,有限幅控制时启动电流峰值为165A,相比与无限幅控制有所减小,输出电压纹波系数和输入电流谐波含量基本相同,仿真结果表明针对传统谐振无桥PFC系统来讲,针对参考输入电流进行限幅控制时,对起动电流的抑制效果并不明显。
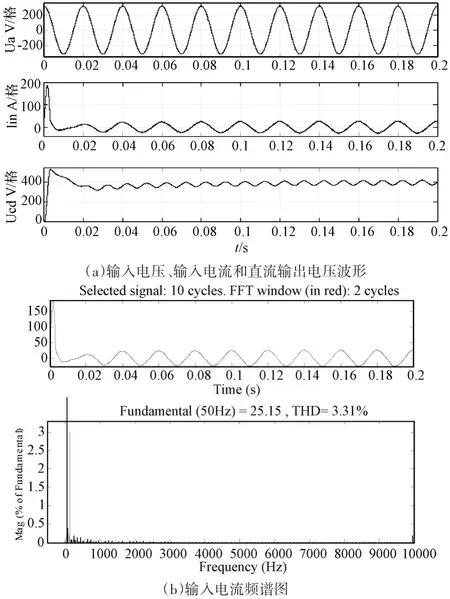
图6 传统无桥PFC系统无限幅控制时输入电压、电流和直流输出电压波形
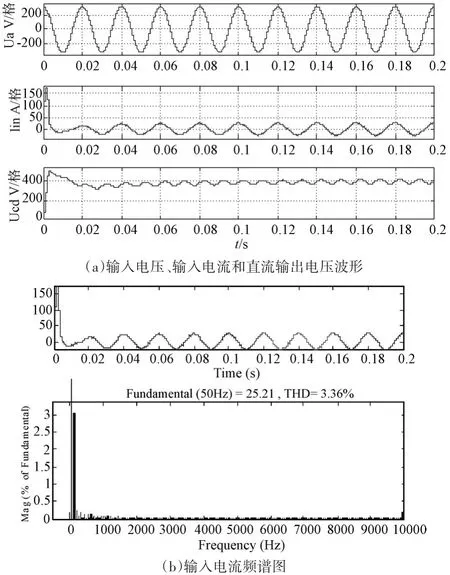
图7 传统无桥PFC系统有限幅控制时输入电压、电流和直流输出电压波形
图8、图9分别为谐振无桥PFC系统双闭环和前馈补偿参考输入电流无限幅和有限幅控制时的输入电压、输入电流和直流输出电压波形。由图6和图8对比可知,输出侧串联一谐振电路之后,输出电压纹波系数和谐波含量也都有所减小,起动电流峰值明显减小,降为80A,但此时起动电流仍然较大,约为3倍的额定电流,如此大的起动电流势必会影响功率器件的安全运行,必须进一步减小起动电流。由图8和图9可知,谐振无桥PFC系统参考电流进行限幅控制之后,输出电压纹波系数和谐波含量与无限幅控制时基本相同,而起动电流峰值由之前80A降为38A,起动电流明显减小,约为1.5倍的额定电流。仿真结果表明谐振无桥PFC系统通过在双闭环和前馈补偿控制系统中引入参考输入电流限幅控制,可以有效抑制系统的起动电流,仿真结果与理论分析基本一致。

图8 谐振无桥PFC系统无限幅控制时输入电压、电流和直流输出电压波形
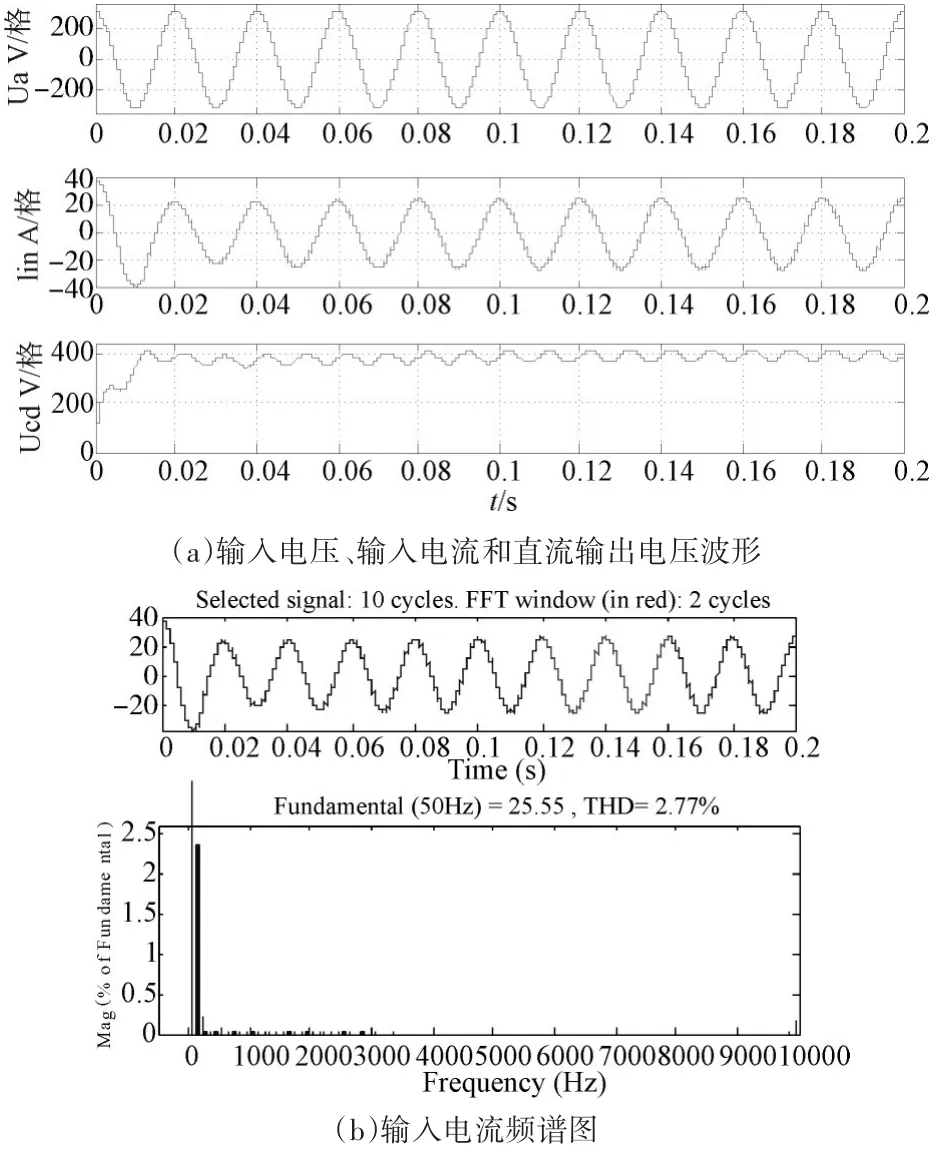
图9 谐振无桥PFC系统有限幅控制时输入电压、电流和直流输出电压波形
6 结语
通过建立无桥PFC系统起动过程等效电路,获得了影响起动电流的因素,并在此基础之上,分析了谐振电路减小起动电流的基本原理;由于谐振电容参数受起动电流和开关频率的限制,起动电容不能太小,使得系统依然存在起动电流大的问题,为此提出在双闭环和前馈补偿控制中引入参考输入电流限幅控制的方法,并对传统无桥PFC和谐振无桥PFC的运行性能进行了仿真对比研究。从理论分析和仿真结果中可以得出以下结论。
1)谐振电路可以减小起动电流,但起动电流依然比较大;
2)双闭环和前馈补偿控制中引入参考输入电流限幅控制的方法,在传统无桥PFC系统中抑制起动电流的效果不明显;
3)双闭环和前馈补偿控制中引入参考输入电流限幅控制的方法,在谐振无桥PFC系统中具有较好的抑制起动电流效果。