基于模糊聚类的黎曼流形空间遥感图像分割算法
2021-08-11赵天玉赵泉华
赵天玉,赵泉华
(辽宁工程技术大学 测绘与地理科学学院,辽宁 阜新 123000)
0 引言
图像分割是遥感图像处理的重要环节,快速、准确的分割结果能够极大程度地降低后续数据处理的难度[1-2]。非监督图像分割主要是将图像映射到特征空间,并利用特征空间所表达的图像信息实现自动化图像分割[3-4]。因此,特征空间的表达能力直接影响分割模型的构建及最终分割精度。
传统遥感图像分割算法主要以图像的光谱特征空间为基础,利用表征同一目标的像素在光谱特征空间自主聚类的性质,设计相应的约束条件实现图像分割。Meanshift算法在全局范围内搜索密度最大的点,并将所有图像特征点划分到最大密度点对应的类别中[5]。与之类似,模糊聚类通过最小化同一类型目标的类内距离并最大化不同类型目标的类间距离的方式,将原始遥感图像数据划分为不同聚类,每个聚类代表一个目标[6-9]。
然而,在图像光谱特征空间,不同聚类间的数据存在明显的重叠,直接在光谱特征空间中建模难以有效区分位于重叠区域内的像素。图像域实际上蕴含了像素间的空间相关性。利用图像域邻域相关性增强光谱特征空间数据的可分性能够有效提高分割算法对噪声的鲁棒性,进而获得更加稳定、可靠的分割结果[10-12]。
遥感图像光谱特征空间为有限维欧氏空间,其数据表达能力有限,即便引入约束条件也难以提高该空间内图像数据的可分性。支持向量机利用核函数将原始遥感图像数据映射到高维空间,能够有效提高不同类型目标间的可分性[13-14]。理论上,当特征空间维数足够高时,能够将所有类型数据分割开来。实际上,利用核函数实现高维空间映射是隐式的,无法从理论上探知高维空间特性,只能利用低维空间测度衡量高维空间数据的相似性。因此,基于高维空间映射的图像分割算法仍需进一步发展。
黎曼流形空间是个曲面空间,欧氏空间距离较近的数据表达在曲面空间其距离可能会明显增大[15-17]。此外,黎曼流形特征空间构建过程需在图像域建模邻域系统分布特征,再将基于概率密度函数的图像特征映射到黎曼流形特征空间。这意味着黎曼流形特征空间不但能够表达遥感图像的光谱特征,还蕴含图像空间的上下文信息。因此,本文首先将图像映射到黎曼流形特征空间,再将传统模糊聚类算法拓展到该特征空间,实现图像分割。利用黎曼流形空间表达图像特征,提高图像不同类型目标的可区分性;采用模糊聚类算法实现黎曼流形空间的图像分类,并通过测地线描述像素点与表征不同类型目标的数据点之间的差异。
1 算法描述
1.1 黎曼流形特征空间映射
设遥感图像为X={xi,i=1,2,…,N},其中xi表示像素值,i为像素索引。以像素i为中心选取半径w构建图像域邻域系统,然后计算邻域系统内所有像素的均值和方差,表示为μi和σi。利用高斯分布描述该邻域系统的统计分布特征,并视为像素i的特征:
(1)
遥感图像中的每个像素特征均可用以该像素为中心构建的邻域系统内的高斯分布来表示。为了将基于高斯分布的图像特征映射到黎曼流形特征空间,首先对式(1)做如下变形:
(2)
令,
(3)
再将式(2)中与xi无关的剩余项记作:
(4)

(5)
与欧氏空间不同,黎曼流形通常采用2套坐标系来表达流形上点的特征,坐标系{θ}的对偶坐标系可表示为:
(6)
利用坐标系{θ}计算坐标系{η}的势能函数:
φ(η)=θkηk-ψ(θ)=
(7)
1.2 模糊聚类
模糊聚类算法以数据点之间的距离为衡量准则,构建描述像素到聚类最小距离的目标函数,可表示为:
(8)
式中,uij为数据i到类别j的隶属度;m为模糊因子用于描述算法的模糊程度;dij为数据i到类别j的距离。传统模糊聚类算法通常利用2个数据点之间的欧式距离定义dij,但黎曼流形特征空间是曲面空间,采用欧式距离一方面无法准确衡量数据点之间的差异,另一方面无法充分利用曲面空间数据高可分性的特点。因此,采用黎曼流形测地线定义该距离:
(9)
采用传统模糊聚类参数求解方法利用式(8)对模糊隶属度uij求偏导并令其等于零,可得求得uij的表达式为:
(10)
由于黎曼流形上的类别采用坐标系{θ}的对偶坐标系{η}表示,而对偶坐标系{η}的计算严重依赖坐标系{θ},因此,本文将模糊隶属度函数反模糊化获取图像分类结果,第i个数据对应的标签为:
li=max{uij|j=1,2,...,c}。
(11)
然后,假设图像局部与对应目标服从同一高斯分布,并计算分割结果中每类目标像素的均值和方差,并利用式(1)~式(7)所示映射方法将其映射为坐标系{η}下,即可更新表征类别的参数。
提出基于模糊聚类的黎曼流形空间图像分割算法具体流程可表示为:
① 初始化聚类数c,模糊隶属度函数uij,邻域系统尺寸w;
② 计算每个像素邻域系统范围内的高斯分布,并根据式(1)~式(7)将其映射到黎曼流形特征空间;
③ 根据式(11)反模糊化模糊隶属度函数,获取每类目标在黎曼流形特征空间中的坐标(ηj1,ηj2);
④ 根据式(9)计算黎曼流形空间中每个数据点到每类目标的距离;
⑤ 利用式(10)计算模糊隶属度函数,并判断是否满足停止条件(本文以迭代100次为停止条件),若满足,则反模糊化并输出分割结果,若不满足则返回步骤③继续迭代,直到满足停止条件。
2 实验结果和讨论
为了验证提出算法的有效性,分别选取光学遥感图像和SAR图像作为研究对象。图1为光学遥感图像及对应分割结果,其中图1(a)~图1(c)为原始光学遥感图像;图1(d)~图1(f)为提出算法分割结果。图中包含不同类型农田、道路、森林以及裸地等多种类型地物。不同类型地物的光谱特征具有一定的相似性,但纹理特征存在较为明显的区别。提出算法在图像域建模邻域系统内的像素分布特征,能够较好地提取图像上下文信息,充分利用图像的光谱及纹理结构特征,因此不但能够有效分割诸如农田、道路等纹理较为光滑的区域,还能够较好地区分森林等纹理变化较为明显的地物目标。
(a)原始图像1
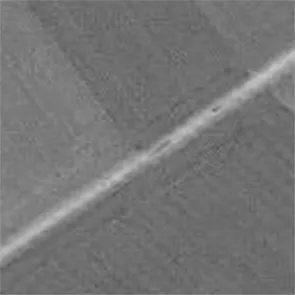
受SAR图像成像机制限制,其图像受斑点噪声影响较为严重。因此,SAR图像分割一直是SAR图像处理的重点及难点问题。为了验证提出算法在SAR图像处理中的作用,选取如图2(a)~图2(c)所示SAR图像,图2(d)~图2(f)为对应图像分割结果。

(a)SAR图像1
不难看出,提出算法能够有效抑制斑点噪声对图像分割的影响,得到较为理想的分割结果。图2(a)中白色冰面区域存在一定程度的融化现象,导致其光谱特征分布不均匀。但提出算法利用高斯分布建模邻域系统内及目标整体的统计特征,能够较好地将冰面部分与水体部分区分开来。图2(b)左上角部分为融化的冰面,右下角为刚刚融化的冰面。受其融化程度影响,不同位置的光谱特征存在明显差异。提出算法利用黎曼流形空间数据可区分性较强的特点,能够较好地识别不同类型目标。图2(c)包含4种不同类型目标,每种目标均存在不同程度的光谱特征变化,提出算法能够较好地识别并分割全部类型目标,且分割结果几乎不受斑点噪声影响。
3 结束语
本文提出一种基于模糊聚类的黎曼流形空间图像分割算法。算法以黎曼流形空间图像特征表达能力为基础,利用模糊聚类算法自动实现不同类型目标的分割。该算法的核心为黎曼流形特征空间表达及几何性质。提出算法将传统模糊聚类算法拓展到黎曼流形特征空间,一方面利用测地线衡量黎曼流形上2个数据点之间的差异,另一方面采用反模糊化隶属度函数的方式避免黎曼流形空间参数估计,进一步提高求解效率。在未来工作中,将进一步研究黎曼流形几何特征与传统模糊聚类算法的融合,提高算法的目标识别能力及分割准确性。
