规则波中迎浪航行的三体无人监测船阻力性能及片体布局影响研究
2021-08-10邹蓓蕾陈淑玲王洪富
邹蓓蕾,陈淑玲,王洪富,白 旭
(江苏科技大学 船舶与海洋工程学院,镇江212100)
三体无人监测船主要用于海洋环境监测、指定海域巡逻和监视.三体船作为一种新型高性能船舶,相比于常规单体船具有更加优良的稳性、快速性以及适航性等性能,目前既有民用也有军用[1-2].对复杂海洋环境下航行的三体船水动力性能开展研究,对于提高我国高性能船舶的设计和安全航运水平具有重要学术意义[3-4].
近年来,随着计算机技术的飞快发展,计算流体力学(CFD)数值模拟技术成为研究船舶水动力性能主要手段.文献[5]对Michell线性兴波理论加以改进,由单体船的兴波阻力估算公式推算出了双体船、三体船等多体船型的兴波阻力估算公式,并探讨了各多体船型的兴波干扰成分.文献[6]基于Rankine源Dawson型兴波阻力理论,直接对各片体物面压力积分来求取三体船的兴波阻力.文献[7]利用商业软件CFX对船体周围的流场及流动特征进行数值模拟,计算了三体船的粘性阻力,并对不同湍流模型下定常以及非定常的数值模拟结果进行分析比较.文献[8]利用STAR-CCM+平台对小水线面三体船周围的粘性流场进行数值模拟,研究了不同侧体的横向位置对三体船耐波性的影响.文献[9]基于数值波浪水池,对波浪中高速三体船运动及增阻进行CFD计算研究.文献[10]利用FINE/Marine软件,基于数值波浪水池理论模拟出规则波,研究了高速三体船迎浪航行状态下的波浪增阻.文献[11]基于RANS方法开展不同主船体线型、侧体线型及侧体布置方式对阻力性能影响的数值仿真研究.在实验研究方面,文献[12]对一艘方型尾三体船在傅汝德数为0.1~1进行拖曳试验,根据试验结果分析比较侧体布局对三体船阻力性能的影响,并对方尾三体船进行了耐波性试验.文献[13]进行了三体船的船模静水阻力试验,通过试验来研究侧体主尺度变化对于三体船兴波阻力的影响.
文中针对南海海况,提出一种可通过自适应调节技术调整主体与侧体相对位置的全新多海域自适应三体无人监测船概念,基于FLUENT软件,采用VOF方法处理自由液面,结合RNGk-ε模型,通过求解Navier-Stokes方程,对该船在规则波中迎浪航行时的流动、阻力等物理现象进行数值模拟计算研究,分析比较了不同航速下和不同侧体位置时候的船舶在规则波中的阻力性能.计算分析侧体位置和间距对阻力性能的影响,为优化设计自适应三体无人监测船提供技术支持.
1 数学模型
1.1 控制方程
控制方程为连续方程和Navier-Stokes动量方程,其微分形式:
(1)
(2)
式中:ρ为流体密度;μ为动力粘性系数;ui,uj为速度分量时均值;ui′,uj′为速度分量脉动值;p为压力时均值;Si为动量方程广义源项;上划线“-”表示对物理量取时间平均.
1.2 湍流模型
文中采用RNGk-ε模型作为湍流模型.RNGk-ε模型能够更好地对船体表面曲度过大导致速度梯度较大的流动状况进行数值模拟.RNGk-ε模型方程为:
(3)
(4)

(5)
(6)
(7)
式中:C1ε=1.42;C2ε=1.68;η0=4.377;β=0.012[14];μt为湍动粘度;Cμ、C1ε、C2ε、αε、αk为经验常数;ε为湍动耗散率;k为湍动能;Gk为因均速梯度引起的湍动能的产生项;Eij为主流的时均应变率.
1.3 自由面处理
在FLUENT中,采用VOF模型处理自由液面问题.对于包含空气和水两相流体的空间区域,定义标量函数f,存在水空间点的f值等于1,其他不被水占据点的f值为0.在各网格单元上对f值积分,并把这一积分值除以单元体积,得到单元的f平均值,即网格单元中水所占据的单元体积份额,在VOF方法中把这一份额值定义为F.若在某时刻网格单元中F=1,说明该单元全部为指定相水所占据,为水单元;若F=0,则该单元全部为空气所占据;当0 (8) 提出了一种可通过自适应调节技术调整主体与侧体相对位置的全新多海域自适应三体无人监测船.三体船的计算模型见图1,其主要尺度参数见表1. 图1 三体船计算模型Fig.1 Calculation modal of trimaran 表1 三体船型主尺度表Table 1 Main dimensions of trimaran model 根据相关文献[15]中经验做法,设置计算域速度入口处距船首1倍船长,压力出口处距船尾6倍船长,计算域侧表面距离船体10倍船宽,三体船设计水线距底部为1倍船长,由于该三体无人监测船关于中纵剖面对称,只需建半船模型.计算域设置如图2. 图2 计算域设置Fig.2 Setting of the calculation domain 利用CFD的前处理软件GAMBIT对三体无人监测船体表面和计算域进行网格划分.首先对三体无人监测船表面进行网格划分,由于该船体表面曲度变化较大,型线较为复杂,故将其划分为非结构性三角形网格,并进行网格加密,并对船体周围的计算域也使用比较容易生成的非结构性四面体网格进行划分,以极高网格划分效率.然后,对周围的计算域划分网格时,考虑到规则波模拟精度及耗散的影响,对自由液面处上下1.5 m内划分较密的六面体结构性网格,网格尺寸在z方向上取波高的1/20,在x方向上取波长的1/60,在y方向上取波长的1/40[16],其余部分则按距离自由面距离按比例生成六面体结构性网格,以此来控制网格数量,减少计算量,同时又保证了计算精度.网格划分完成后,统计计算域内共计生成约180万个网格,并在GAMBIT中检查网格质量,划分完成的网格如图3. 图3 网格划分Fig.3 Grids of computational domain 由于文中的研究对象三体无人监测船的设计航速达到30 kn,航速较高,根据文献[17]总结得出对高航速下的三体船而言,侧体与主体横向间距对于兴波阻力有着显著影响.根据本研究中三体无人监测船自适应的特点,文中主要研究侧体横向位置的变化对于三体无人监测船阻力性能的影响.因此,对计算模型的侧体进行3个不同横向位置上的变动,共生成3个模型,分别表示为模型Ⅰ、Ⅱ、Ⅲ,主、侧体中心线横间距分别为2.5、3.5、4.5 m. 根据总体设计资料,提取出三体无人监测船作业海域的3种波浪条件,以波浪条件a、b、c表示.选取南海4级海况,其浪高范围为1.25~2.5 m.文中数值模拟的规则波波幅选取0.75、1、1.1 m,波长/船长范围为0.7~2.3,得出三体无人监测船在设计航速状态下迎浪航行的9种计算工况如表2(工况1~3为波浪条件a,工况4~6为波浪条件b,工况7~9为波浪条件c). 表2 三体无人监测船规则波中数值计算工况Table 2 Numerical calculation conditions of trimaran in regular waves 基于Fluent软件的三体船在规则波中阻力计算的参数设置:三维非定常双相流;选用RNGk-ε湍流模型;给定三体船航速,采取三种侧体和主体横向间距;采用速度入口造波. 通过FLUENT软件中的Monitor功能对数值水槽中测点进行数据读取,可以得出各测点处的波幅时历图.设置监测点1、2、3,位置分别位于入口处、距入口1倍波长以及距入口1.5倍波长.图4为三维数值波浪水槽.图5为波高1.5 m时,3个监测点的波幅时间历程曲线.x轴为流动时间t;竖直z轴为监测点处的波幅. 图4 三维数值波浪水池Fig.4 3D numerical wave tank 由图5可以看出,随着波浪的传递,各监测点数值模拟的波幅相较于理论波幅均偏小,波幅在可接受范围内稍有衰减,波浪周期变化较小,与理论值较为吻合.消波区内波幅减小明显,消波效果显著.通过对比,说明文中数值模拟出的规则波的波幅与周期均与理论值吻合较好,精度较高,可用于后续的数值模拟研究. 图5 各监测点处的波幅时历曲线Fig.5 Amplitude time curves at each monitoring point 图6为航速30 kn时不同侧体横向位置下的静水阻力Rsw.可以看出,侧体位置的变化对三体船总阻力影响很大.当主体航行时造成的波浪的波峰与侧体航行时兴起的波浪的波谷相互叠加时,会产生有利干扰,减小阻力;而当主体航行时兴起的波浪的波峰与侧体航行时造成的波峰相互叠加时,主体和侧体会产生不利的干扰,阻力的值就会下降.图7为模型Ⅰ~Ⅲ的兴波图. 图6 不同侧体横向位置的阻力曲线Fig.6 Resistance curve of different lateral positions 图7 航速为30 kn的兴波图Fig.7 Wave making diagram speed of 30 kn 图8~10分别为模型Ⅰ~Ⅲ摩擦阻力系数Cf、剩余阻力系数Cr及总阻力系数Ct的对比曲线.可以看出,摩擦阻力系数基本保持不变,而剩余阻力系数则下降颇为明显,在波浪a中下降23.0%,在波浪b中下降23.2%,在波浪c中下降18%. 图8 摩擦阻力系数变化曲线Fig.8 Curve of friction resistance coefficient 图9 剩余阻力系数对比曲线Fig.9 Comparison curves of residual resistance coefficient 图10 总阻力系数对比曲线Fig.10 Comparison curves of total resistance coefficient 图11为在波浪条件a中的自由液面波形图.从模型Ⅰ~Ⅲ的尾部波形可以看出,随着主体和侧体间横向间距的增加,三体船航行过后尾部兴起的波浪波高下降明显,说明随着横向间距的增加,三体无人监测船的主体与侧体之间形成了有利的兴波干扰,且在合适的范围内,这种有利干扰随着横向间距的增加而增加. 图11 波浪a中的兴波图Fig.11 Wave making diagram in wave a (9) 波浪增阻的无量纲化形式为: (10) 式中:ζa为波幅;B为船舶型宽(文中都取主船体型宽);L为船长. 图12为模型Ⅰ~Ⅲ对应不同侧体横向位置的波浪增阻.由图12可以看出,模型Ⅰ的波浪增阻最大,模型Ⅱ、Ⅲ的波浪增阻相差不大,说明随着侧体横向位置距离的增加,波浪增阻的基本趋于稳定. 图12 不同侧体横向位置时的波浪增阻Fig.12 Wave resistance increases at different lateral positions 图13为模型Ⅲ在波浪a、b、c中的兴波图,图14为波浪a、b、c的波峰位于模型Ⅲ船艏处时的船体表面动压力分布.可以看出,波长以及波幅对三体无人监测船在规则波中航行时产生的兴波影响显著,随着波幅以及波长的增加,三体无人监测船兴起的波浪扩散范围也逐渐扩大. 图13 模型Ⅲ在波浪中的兴波图Fig.13 Wave making diagram of model Ⅲ in wave 图14 模型Ⅲ在波浪中表面压力分布Fig.14 Surface pressure distribution of modelⅢ in wave 当规则波的波峰位于三体船艏部时,波浪c中船艏部的动压力也较波浪a和b中的动压力大,随着波幅波长的增加,三体船首尾部的压力差也呈逐渐增加的趋势.由此表明三体船在规则波中的兴波阻力与粘压阻力也在逐渐增加,在波幅最大波长最长的波浪c中,在三体船尾部形成的湍流区域也相对较大,兴波扩散范围广,兴起波浪的波高也较高,从而产生的兴波阻力也较大;而在波幅及波长均最小的波浪a中,相同航速下的三体无人监测船在船尾产生的湍流区域较小,兴波扩散范围相对较小,兴起波浪的波高也较低,从而产生兴波阻力也较小. (1)不同的侧体布置会对船舶阻力造成重要影响,在合适的范围内,合理增加主体与侧体之间的横向位置距离可以形成有利干扰,对优化其阻力性能,提高其快速性有益. (2)规则波的波长以及波高对三体无人监测船在迎浪航行时的阻力性能影响显著,规则波的波幅越大波长越长对三体无人监测船的阻力性能影响越大. (3)利用RANS方程、RNGk-ε模型和模拟自由面的VOF方法对不同横向侧体位置时多海域自适应三体无人监测船在规则波中的水动力特性进行计算,通过结果分析表明文中建立的模型是可靠的.2 计算模型的建立与设置
2.1 计算模型


2.2 计算区域

2.3 网格划分

2.4 计算工况及数值计算方法

3 计算结果与分析
3.1 线性规则波数值模拟


3.2 静水中不同侧体横向位置的阻力性能


3.3 规则波中不同侧体横向位置的阻力性能



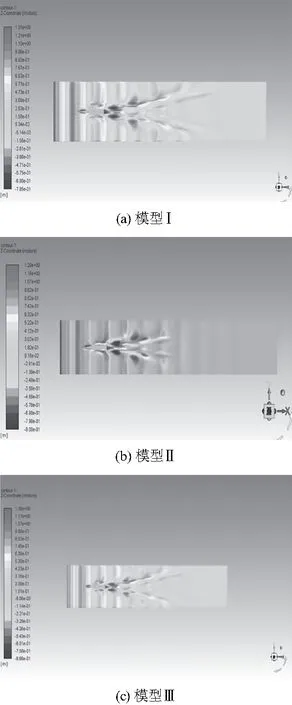


3.4 波浪中三体船流场分布规律


4 结论