基于物联网的配方施肥系统设计研究
2021-08-07李泰来吴光星吴争光孙学成
李泰来,吴光星,杨 琳,吴争光,孙学成
(1.中工武大设计研究有限公司,武汉430070;2.湖北省精准农业工程技术研究中心,武汉430070;3.华中农业大学资源与环境学院,武汉430070)
0 引 言
在柑橘生产中,灌溉和施肥的管理直接影响着柑橘的产量和品质。目前有些山地柑橘园根据地势优势在高处建设了蓄水池,利用高度落差产生的压力将液体输送到滴灌管网中进行灌溉。为提高肥料的利用率,农技人员或果农通常是在此类柑橘园中建立独立的水池和肥池。这种将水、肥分开滴灌的方式简单实用,但整个过程中滴灌的启停及水、肥滴灌时间比例需要人工操作,费时费力且效率低下[1]。因此迫切需要一种自动控制的水肥一体化系统。
配方施肥是综合运用农业科技成果,根据作物需肥规律、土壤供肥性能与肥料效应,在以有机肥为基础的前提的条件下,产前提出N、P、K 和微肥的适宜用量与比例,以及相应措施的施肥技术。与传统施肥方式相比,配方方法具有较高的精度,推荐的配方方案具有良好的反馈性,不同年际之间有较强的稳定性,所得的资料有利于储存信息[2]。目前市面上已有相应的配方肥料的定制和出售。
本研究的目的就是将物联网的技术与配方施肥相结合,从整体系统上进行优化,提出一套基于物联网的配方施肥系统来进一步提高灌溉施肥设备的稳定性和适用性。
1 系统结构及原理
本系统硬件主要有进、出水离心泵、吸肥泵、搅拌装置、首部控制器、变频控制器、远传恒流阀、液位变送器、电磁流量计、电磁阀、远传水表等组成。其结构如图1 所示。首部控制器控制变频控制器启动,进水离心泵将经过滤器过滤之后的水注入混肥罐,远传水表实时记录进水量,并传入首部控制器。混肥罐中设有浮球阀用于高低水位报警[3],混肥罐中的液位变送器用于液位负反馈,搅拌装置用于将水和原液肥混合均匀。原液罐与混肥罐通过吸肥通道相连,吸肥通道有两种方式,一种是原液利用自身重力流入混肥罐,另一种是通过吸肥泵按照设定流量进行吸肥。原液罐中的液位变送器记录初始液位和实时液位。系统的出口与微灌系统主干管相连。出口处设有远传恒流阀和电磁流量计用于控制和监测出肥流量,逆止阀用于防止出肥液回流。恒液位变频控制器和首部控制器负责采集电磁流量计、液位变送器、远传水表等输出信息、控制水泵转速、电磁阀的开关动作、给定恒流阀流量参数等。
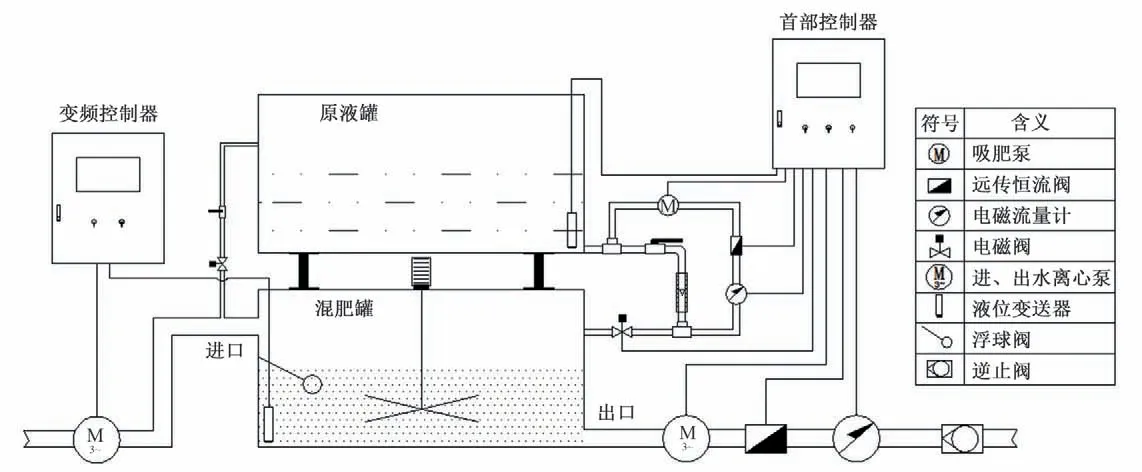
图1 配方施肥系统结构示意图Fig.1 Structure diagram of formula fertilization system
该系统搭建完成后,需要调节混肥罐进出水位的动态平衡,混肥罐的出水由离心出水泵控制,进水泵的功率稍大于出水泵,出水泵工频状态运行,进水泵采用变频状态运行。其运行原理图如图2所示。混肥罐中的液位变送器经过数据采集模块将实际液位反馈给变频器后,变频器根据输入的给定值和反馈的实际值,利用内置的PID调节器自动改变输出频率,从而改变进水泵电机的转速,将混肥泵液位平稳地控制在恒定范围内[4-9]。

图2 恒液位变频控制原理图Fig.2 Schematic diagram of constant level frequency conversion control
2 系统流量调节
当吸肥通道通过吸肥泵按照设定流量进行吸肥时,出肥流量与吸肥流量,二者之间存在以下关系:

假定用户设定稀释倍数为300 时,应满足Q水=300Q肥,推导出Q出=301Q肥。首部控制器在执行时只用给吸肥通道和出口处的远传恒流阀设定301倍的流量关系即可。
当吸肥通道通过肥液自身重力进行吸肥时,此时需要手动调节吸肥通道上的限流阀,配合转子流量计调节好合适的吸肥流量Q肥,使进肥与出肥满足对应稀释倍数的关系。此种方式调试较为复杂,但是设定好流量参数后,系统的能耗会降低。
3 系统控制方案设计
3.1 系统控制硬件方案
系统硬件方案框图如图3所示,硬件方案包括首部控制器、恒液位变频控制器、数据采集器、人机界面1 和2、I/O 控制器及各执行设备和传感器等。

图3 系统硬件方案框图Fig.3 System hardware scheme block diagram
首部控制器主要功能是通过数据采集器采集液位变送器、远传水表、远传电流阀和电磁流量计的实时数据,通过I/O 控制器控制电磁阀和搅拌电机。与首部控制器连接的人机界面2为用户提供一键式操作和查看实时数据的功能界面,首部控制器与恒液位变频控制器通过信号线相连,恒液位变频控制器向首部控制器报告各执行机构的状态和实时数据,首部控制器下发开启和停止指令控制恒液位变频器运行和停止。与恒液位变频控制器相连的人机界面1 为用户提供液位参数设置和PID 参数设置等功能界面。当恒液位变频控制器接收到首部控制器发来的启动命令时,恒液位变频控制器控制进水泵启动,并通过数据采集器实时采集混肥罐实时液位值,形成液位负反馈,通过调节好PID参数使混肥罐达到恒液位的效果[12,13]。
3.2 系统控制软件方案
系统控制软件主要利用C#、C 语言实现人机界面编写和各种逻辑控制,主要解决各模块参数初始化、信号及数据的预处理、控制设备的运行等问题。系统运行初态包括向混肥罐加水,使混肥罐液位达到设定值并通过调节恒液位控制参数保持液位恒定,记录各初始值等操作。系统运行时结合当前值和初始值得稀释用水量:

式中:WH为稀释用水量;W1为当前远传水表值;W0为远传水表初始值;H1为当前蓄水池液位;H0为蓄水池初始液位;S蓄为水池底面积。
注入到混肥罐中的配方原液为:

式中:Wh为注入混肥罐中的配方原液量;h0为原液罐初始液位;h1为当前原液罐液位;S原为原液罐底面积。
系统流量值设定还应满足如下关系式:

式(4)表示吸肥所用时间与进水所用时间保持一致,即原液罐肥液吸收完后,系统的进水量总和与进肥量总和同样满足设定的稀释倍数关系。通过关系式(1)和(4)及恒流阀的量程,可得出适合吸肥恒流阀和出口恒流阀的流量调节参数Q肥和Q出。
系统运行流程图如图4 所示,当用户输入稀释倍数为300倍时,系统运行后会判断WH是否大于300 倍的Wh,或检测混肥罐中液位是否为0,当检测到大于300倍或液位为0时系统会停止运行并启动清洗管道流程。系统运行过程中搅拌泵会持续运行使肥液混合均匀。

图4 系统控制软件流程图Fig.4 System control software flow chart
系统的部分软件操作界面如图5 所示,用户设定好稀释倍数、每株施肥量和相关信息后会生成对应的施肥配方[10,11],选定对应的施肥配方,并点击按给定配方执行后系统开始运行,运行过程中有进度提示,用户也可回到系统运行界面查看设备运行状态和各种参数值。系统会记录每次的施肥记录包括本次施肥的相关参数和时间,同时可与系统平台同步完成远程控制施肥的操作。

图5 配方施肥操作界面Fig.5 Formula fertilization operation interface
4 结 语
本文中的系统采用了性能稳定,价格相对便宜的远传恒流阀、液位变送器和远传水表,吸肥通道的流量与系统出肥流量按稀释倍数对应的设定流量参数运行,保证系统出肥浓度的均匀性,同时混肥桶中搅拌装置运行也能进一步提高混肥的均匀性,实现了控制肥液稀释倍数的施肥方式。系统在实际运行试验中,实现简单,操作方便,运行可靠稳定,具有较好的控制效果。进水泵采用了恒液位变频启动,实现了电机的软启动,改善了电机的启动性能,能充分降低电机启动电流,减小电机启动瞬间电流对电网的冲击,增加电机寿命,同时还可消除管网水锤现象,避免管网内的流量突变,减少了爆管、滴漏的发生概率。