天基平台快速反射镜扰动信号抑制方法
2021-08-06李金鹏艾志伟
李金鹏,艾志伟,宾 原,李 静
(桂林航天工业学院,广西 桂林 541004)
0 引言
轨道空间中存在的厘米级空间碎片对在轨飞行器的运行有极大威胁[1-3],在天基平台上采用激光辐照空间碎片使其降轨并最终落入大气层烧毁是一种高效清洁的空间碎片清除方式[4-6]。为了能够精准辐照空间碎片,首先要保证对空间碎片的稳定跟踪。复合轴系统通过粗、精二级子系统可实现对碎片目标的捕获跟踪和瞄准,这个过程的核心是对目标的跟踪[7]。快速反射镜是实现精跟踪的重要精密光学仪器,精跟踪快速反射镜系统输出精度是衡量复合轴系统跟踪能力的重要指标。地基平台下,快速反射镜所受的扰动主要来自运动平台,扰动作用形式主要是低频振动,针对地基平台的扰动抑制,丁科提出了抑制光束抖动的复合控制方法[8],罗勇提出了结合扰动观测和基于加速度传感器的三环控制系统[9]等多种方法。
与地基平台不同,天基平台快速反射镜不仅需要考虑运动平台扰动的作用,空间电离辐射和天体摄动力对负载快速反射镜的影响也不能忽略[10],但针对天基平台快速反射镜多扰动信号抑制方法的研究鲜见报道。
为了抑制不同形式不同作用点扰动对系统的影响,本文提出了一种多扰动抑制控制系统。分析了多扰动信号对快速反射镜控制系统输出精度的影响,通过在电机电流输出端和负载输出端分别引入电流干扰观测器(Current DOB,CDOB)和位置干扰观测器(Position DOB,PDOB),合理设计扰动控制器参数实现对特定扰动的抑制。完成系统控制器和扰动观测控制器控制参数设计后,在SIMULINK 中对系统进行了仿真测试并与刚柔耦合虚拟样机测试结果进行了对比分析以验证提出方法的正确性。
1 扰动抑制方法
根据快速反射镜的结构组成,受控快速反射镜控制框图如图1所示。
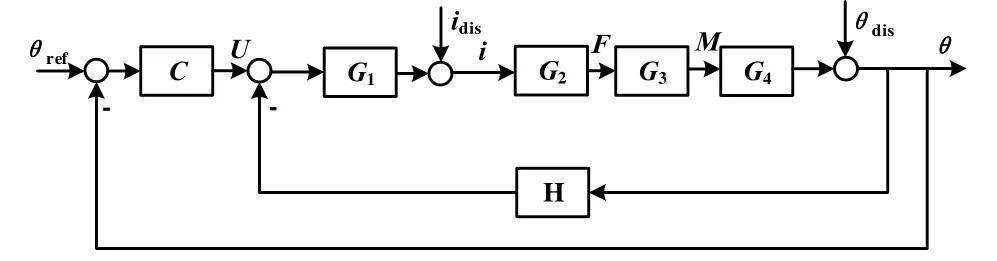
图1 受控快速反射镜控制框图Fig.1 Control block diagram of FSM
图1中,θref是系统的输入位置信号,θ为系统的输出位置信号,C是控制器,G1是音圈电机传递函数,G2是音圈电机电流到输出作用力的传递函数,G3是音圈电机输出作用力转化为输出力矩的传递函数,G4是负载反射镜转矩到输出角位置信号的传递函数,H是负载对电机反电动势传递函数。控制器输出电压U控制目标对象跟随输入信号运动,idis是系统电气元件受到空间电离辐射后作用在系统的电流扰动信号,θdis是机械部分受到天体摄动力影响产生的扰动信号,此时系统输出为:

式中:Δ1(s)=1+G1G2G3G4(C+H)是系统的特征方程。从式(1)可以看到,快速反射镜的运动由于受到扰动电流信号影响,在系统输出位置产生偏差,电流扰动信号到输出端的传递函数为:

还可以看到系统位置输出也受转角扰动信号的影响,转角扰动到输出端的传递函数为:

根据式(2)和式(3)可以看出电流和转角扰动的作用均会降低系统输出精度。为了抑制扰动,典型的方法如图2所示。图中GFSM是快速反射镜模型,G~FSM是快速反射镜的参考模型,Gx是等效扰动传递函数,Cf是扰动观测环节控制器。这种方法应用的等效扰动传递函数是近似模型,且以快速反射镜的总体模型为基础设计的扰动观测抑制系统,由于快速反射镜总体理论模型的传递函数是三阶模型,造成扰动观测控制器的难以实现。
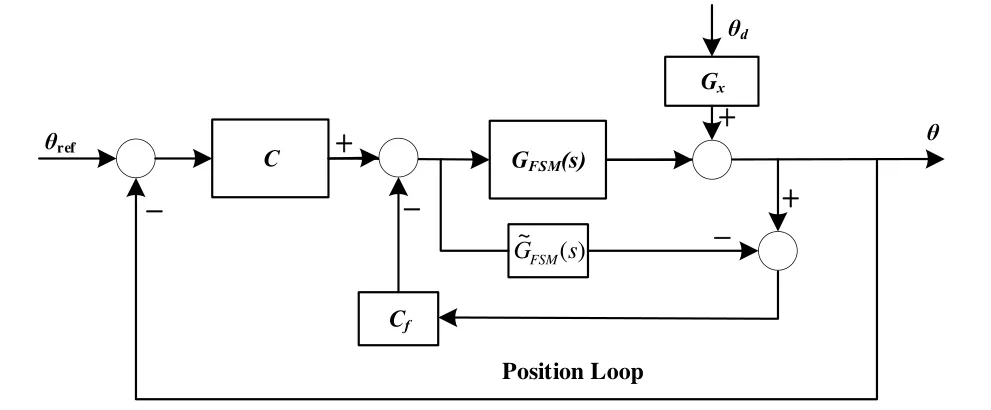
图2 快速反射镜总体模型DOB 控制框图Fig.2 DOB control block diagram of FSM model
为了避免上述问题,提出了一种以不同元件传递函数为基础的扰动抑制控制系统。图3和图4分别是在电气元件和机械组件输出端单独施加DOB 环节的扰动观测控制框图。

图3 电流扰动观测控制系统框图Fig.3 Control system diagram with CDOB

图4 转角扰动观测控制系统框图Fig.4 Control system diagram with PDOB
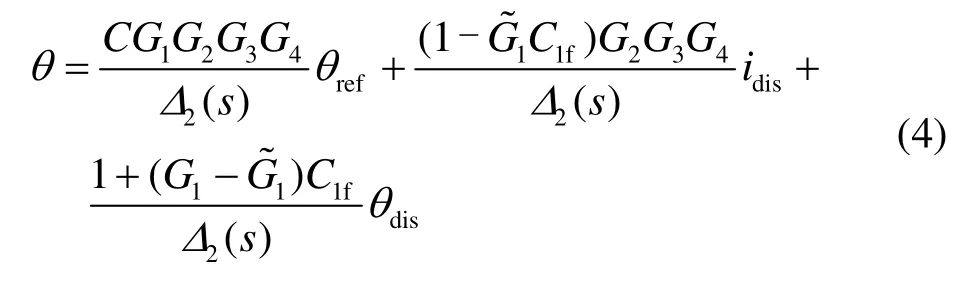

上式分子项中,通过合理的设计CDOB 控制器C1f,使得小于1,则电流扰动可以被抑制。
加入CDOB 后系统转角扰动信号扰动抑制传递函数为:

通过对比式(3)与式(6),容易得出两个式子近似相等,也就是说引入的CDOB 不影响转角扰动输出。
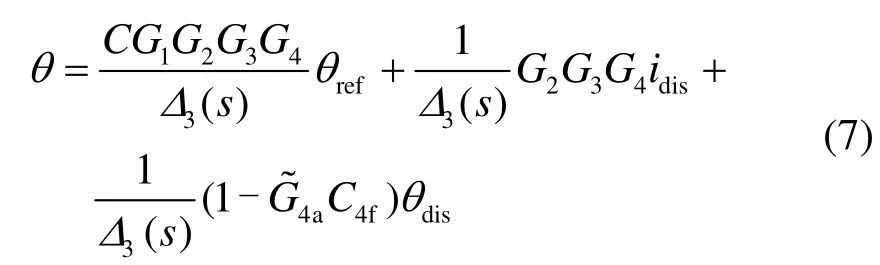
加入PDOB 后电流扰动抑制传递函数为:

通过对比式(8)与式(2),容易得出两式近似相等,也就是说引入的PDOB 不影响电流扰动输出。加入PDOB 后转角扰动抑制传递函数为:

通过在分子项中合理的设计C4f,使式(7)中的等于0,则转角扰动理论上可以被完全抑制。与总体模型设计DOB 不同的是,根据运动部分加速度模型设计PDOB 控制器的方法是工程上能实现的。
根据上述分析,为了同时抑制系统中多个扰动的作用,设计了多扰动抑制控制系统,如图5所示。
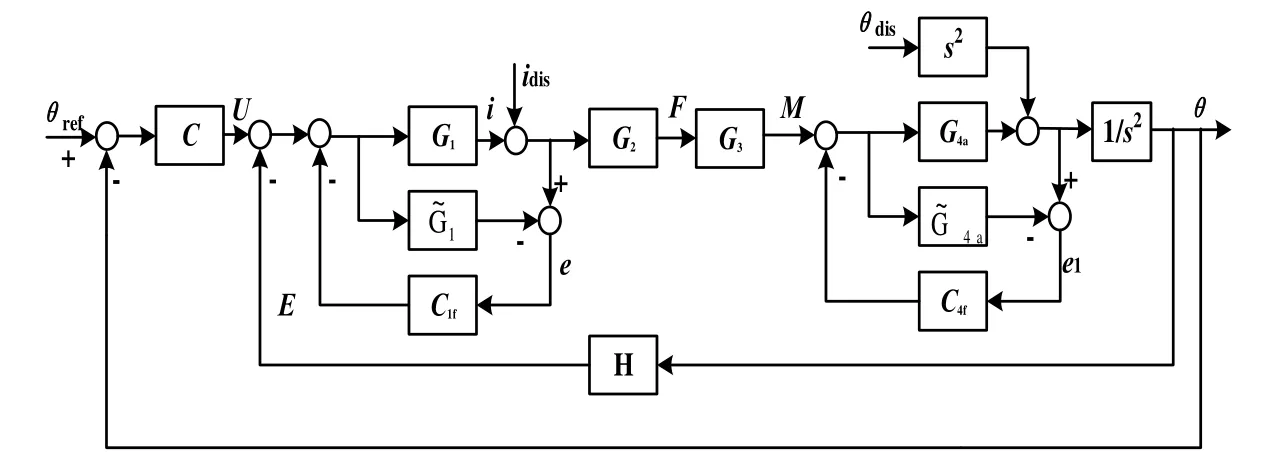
图5 多扰动观测控制系统Fig.5 Multiple disturbance observation control system
此时,系统输出为:

式中:

可以看出,加入双DOB 前后,系统特征方程Δ1≈Δ4,即加入双DOB 环节前后系统特征方程不变,表明引入的CDOB 和PDOB 不会影响系统的稳定性。加入双DOB 后,输出电流扰动抑制传递函数为:

双DOB 作用下转角扰动抑制传递函数为:

通过对比式(5)、式(9)和式(12)、式(13),可以观察到对双DOB 环节的控制器C1f和C4f的设计是相互独立的,利用分别引入CDOB 和PDOB 过程中设计的扰动控制器即可实现多扰动观测控制系统对特定扰动的抑制。
2 控制器设计
根据快速反射镜的结构组成和运动机理,可以得到系统各环节数学模型如下:
式中:R是电机线圈电阻;L是线圈电感;kf是电机力常数;l是力作用点到转动中心的距离;J是运动部分转动惯量;c是运动阻尼;kθ是转动刚度;ke是反电势常数。系统控制器C采用不完全微分PID 控制,可使控制系统满足快速性、稳定性、准确性的要求。由于电机传递函数是一个惯性环节,所以系统中引入的DOB 若要实现对多干扰的抑制,扰动控制器需满足条件:

idis电流干扰可以通过限制系统的频带获得较好的抑制效果,控制器C1f采用高频剪切滤波器,衰减高频扰动,设计的CDOB 控制器C1f的传递函数为:

式中:T=R/L;τ是滤波系数。在获得运动部分加速度模型的基础上,位置干扰θdis理论上可以被完全抑制,此时设计的PDOB 控制器C4f为:

3 仿真测试
为了验证恶劣工况作用下所提出算法的扰动抑制能力,对理论数据进行了仿真测试,根据无扰动系统状态输出结果、工作环境、系统闭环带宽和结构谐振频率,设置测试输入电流扰动频率为200 Hz,幅值为0.1;输入运动扰动频率为40 Hz,幅值为0.001。从图6加入CDOB 后扰动信号的输出数据,可以看到,未加CDOB 环节时,输出数据曲线的峰值为0.0015,加入CDOB 环节后,峰值为0.00028,降低了81.53%,但是也可以清楚看到扰动输出并未被完全抑制,这主要是由于转角扰动未被系统抑制的原因。

图6 加入CDOB 前后扰动输出数据对比Fig.6 Comparison diagram of disturbance output before and after using CDOB
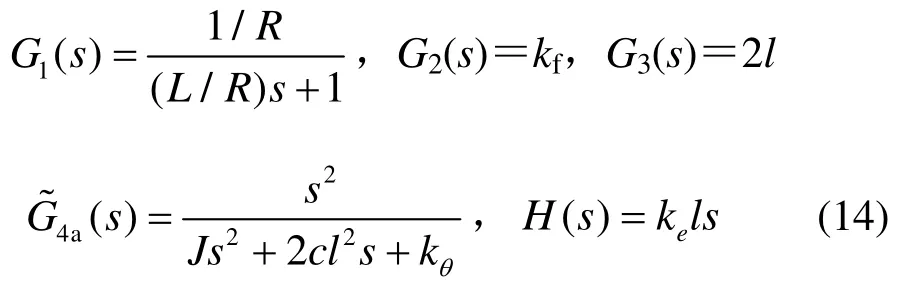
图7是加入PDOB 后扰动输出数据,从图中可以看出,加入PDOB 环节后,峰值为0.00033,与加入PDOB 之前相比降低了78.07%,加入PDOB 后转角扰动得到明显抑制,但也可以看到扰动对输出仍然有明显的影响,这是由于电流扰动没有被抑制造成的。
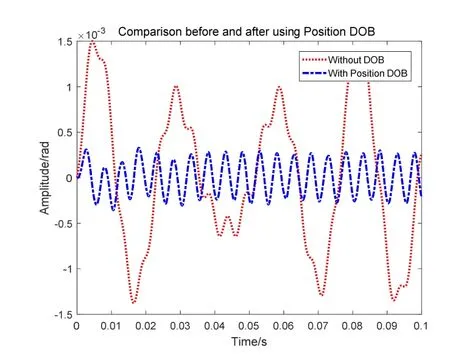
图7 加入PDOB 前后扰动输出数据对比Fig.7 Comparison diagram of disturbance output before and after using PDOB
图8是加入双DOB 前后扰动输出数据对比。从图中可以看出,加入双DOB 环节后,扰动输出峰值为0.00011,降低了92.59%,加入双DOB 后,扰动信号对输出的影响基本得到了抑制,这是因为在系统中引入的特定干扰观测环节实现了对特定干扰信号的抑制,进一步可以得到CDOB 环节对200 Hz 电流扰动的抑制能力为74.12%,PDOB 环节对40 Hz 位置扰动的抑制能力为70.66%。
图8 加入双DOB 前后扰动输出数据对比Fig.8 Comparison diagram of disturbance output before and after using double DOB
图9是加入CDOB 前后,电流扰动抑制能力特性曲线,图10是加入PDOB 前后,位置扰动抑制能力特性曲线。频域仿真结果显示,CDOB 环节对200 Hz电流扰动的抑制能力为62%,PDOB 环节对40 Hz 位置扰动的抑制能力为65%。频域结果与时域结果之间的误差在10%左右,考虑主要是在仿真过程中在系统中施加了噪声造成的。
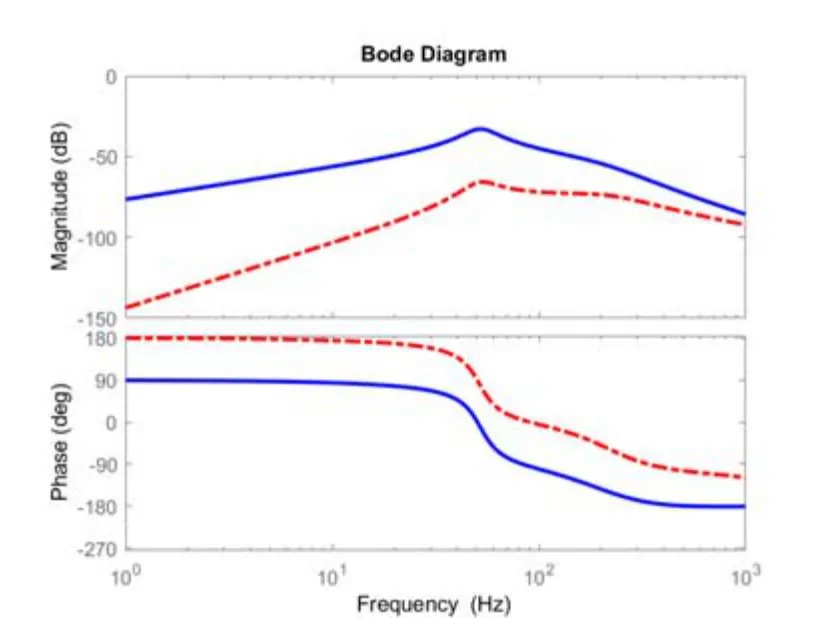
图9 加入CDOB 前后扰动抑制频率特性对比Fig.9 Comparison of disturbance suppression frequency characteristics before and after using CDOB
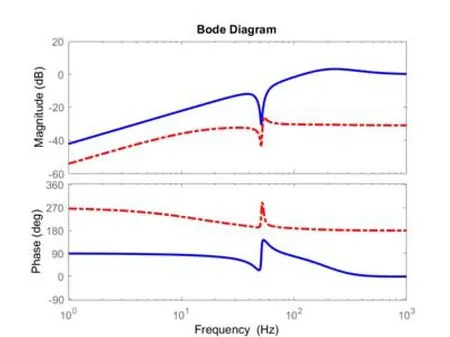
图10 加入PDOB 前后扰动抑制频率特性对比Fig.10 Comparison of disturbance suppression frequency characteristics before and after using PDOB
为了进一步验证理论分析结果和仿真结果的正确性,在控制系统中引入了虚拟样机刚柔耦合模型进行了对比测试。图11是加入CDOB 电流干扰观测器后,理论仿真的数据与虚拟样机仿真数据对比图,通过计算得到理论输出结果与根据虚拟样机输出结果的均方根误差为8.21%。图12是加入PDOB 后,理论仿真的数据与虚拟样机仿真数据对比图,通过计算得到理论输出结果与根据虚拟样机输出结果的均方根误差为1.92%。图13是加入双DOB 后,理论仿真的数据与虚拟样机仿真数据的对比图,通过计算得到理论输出结果与根据虚拟样机输出结果的均方根误差为0.1%。3 组实验的理论结果与测试结果的均方根误差,存在较大差异的原因有两个:一是在样机测试时在系统输出端施加了高频噪声,对这个噪声起到主要抑制作用是PDOB,CDOB 的作用次之,造成了单CDOB 作用时,理论结果与样机测试结果误差较大,双DOB 作用下误差最小;二是由于理论模型采用的是线性模型,忽略了其中的非线性因素,而虚拟样机在测试过程中各部分的连接方式选择的是“接合”,也进行了简化,最后造成了理论仿真结果和虚拟样机测试结果出现了较大误差。但总体来看,这3 组结果的误差都在10%以内,且时、频域分析结果的结论是相同的,研究结果可以在一定程度上为工程应用提供参考。
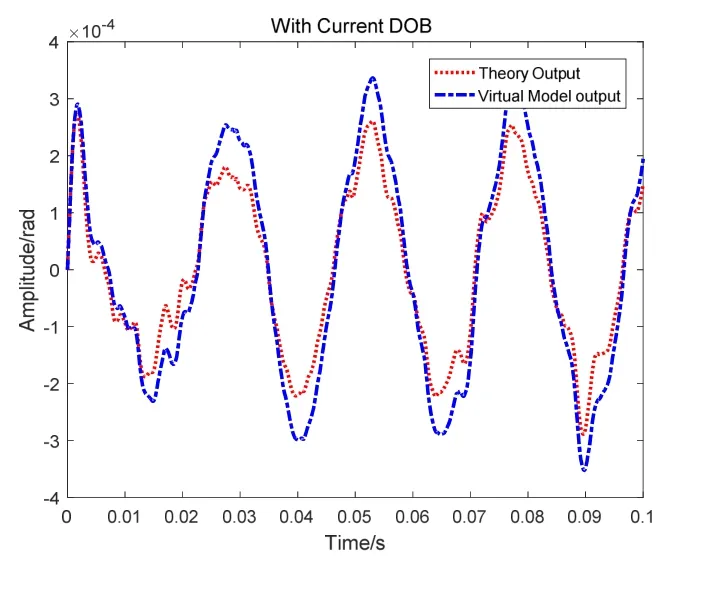
图11 加入CDOB 后理论与虚拟样机数据对比图Fig.11 Comparison diagram between theoretical and virtual prototype with CDOB

图12 加入PDOB 后理论与虚拟样机数据对比图Fig.12 Comparison diagram between theoretical and virtual prototype with PDOB
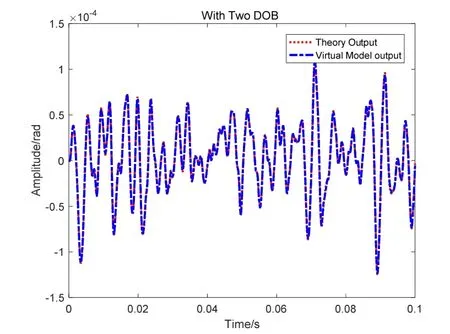
图13 加入双DOB 后理论与虚拟样机数据对比图Fig.13 Comparison diagram of theoretical and virtual prototype with two DOB
4 结论
本文针对天基平台快速反射镜受到多种扰动作用的情况,设计了一种以不同元件模型为基础的多扰动抑制控制系统。分析了多扰动信号对控制系统输出精度的影响;根据不同作用点不同作用形式的扰动,设计了对应的干扰观测环节实现对特定扰动的抑制;进行了系统分析,根据系统分析结果确定了各扰动控制器的参数;对理论模型进行了时域频域仿真并与虚拟样机测试结果进行了对比。仿真结果证明了设计的采用双DOB干扰观测器的多扰动抑制方法的有效性。
