基于模糊控制的车辆主动避撞系统及仿真验证
2021-08-06李文礼郭文博石晓辉张友松
李文礼,郭文博,石晓辉,陆 宇,张友松
(重庆理工大学 汽车零部件先进制造技术教育部重点实验室,重庆 400054)
随着我国汽车保有量的快速增加,因交通事故造成的人员伤亡和经济损失也越来越大,作为智能交通系统的重要组成部分,车辆主动避撞系统能够弥补驾驶员判断及操作失误的不足,可以减少38%的交通事故的发生,对提高交通安全、避免或缓解碰撞事故具有重大作用[1]。随着车辆主动避撞系统的迅速发展,国内外学者提出来很多避撞模型,主要可分为安全距离模型和安全时间模型。对于安全距离模型,具有代表性的有NHTSA模型[2]、Mazda模型[3]、Honda模型[4]等。袁朝春等[5-6]考虑车辆制动性能等因素,建立了能同时兼顾驾驶安全和道路使用率的主动避撞DRV安全距离模型。刘志强等[7]以车辆临界避撞条件下所需的最小减速度为阈值建立了DAC模型,其避撞率和及时性相比于TTC模型都有一定的提高。对于安全时间模型,胡远志等[8]基于新的碰撞时间TTC开发了一种体现驾驶员控制优先性和协调性的主动避撞系统。裴晓飞等[9]提出碰撞时间余量的概念,设计了一种符合驾驶员避撞特性的分级报警/避撞算法。兰凤崇等[10]根据汽车追尾适度深度调查分析确定制动减速度,在考虑舒适性的条件下确定碰撞时间阈值建立主动避撞模型,其可在相对车速65 km/h以内有效避撞。这些主动避撞模型通常都采用了固定的参数,忽略了不同类型的驾驶员、不同的行车状况的差异。对于不同类型的驾驶员在不同行车的状况下,对主动避撞系统激活的时刻和制动停止后与前方障碍物保持的安全距离的要求都是不同的,这些因素不但会影响驾驶员驾驶时的紧张程度和安全感,还可能会在一定程度上影响交通,降低道路的运行效率。
考虑驾驶员类型和车辆行驶工况因素,建立了纵向和横向危险状态判别模型;利用模糊控制具有鲁棒性强、具有较强的容错能力、适用于解决过程控制中的非线性问题的优点,设计了基于模糊控制的车辆主动避撞系统,模糊控制器Ⅰ选取驾驶员类型和主车车速为输入参数、主动制动阈值为输出参数,根据驾驶员类型和行车工况的不同来控制不同的制动时刻,模糊控制器Ⅱ选取相对速度和相对距离,输出制动信号以对车辆制动过程中的制动压力进行控制,并通过Prescan仿真平台对该主动避撞系统的有效性进行了仿真验证。
1 主车危险状态判别模型与主动避撞系统设计
在主车行驶过程中,主要是根据主车危险状态判别模型来判断其危险状态以决定是否需要激活主动避撞系统及激活主动避撞系统的时机。错误地激活主动避撞系统不但无法有效地帮助驾驶员避免危险状况发生,而且还可能会在一定程度下影响道路交通,降低运行效率。主车危险状态判别要分为横向和纵向两个方面进行判断,当2个条件全部满足时,车辆主动避撞系统才会被激活。
1.1 纵向危险状态判别模型建立
对于主动避撞系统,基于安全时间算法相比于安全距离算法更能体现驾驶员在自然驾驶状态下的感知和判断习惯。将以安全时间算法为基础建立纵向危险状态判别模型,根据主车与前方障碍物的运动状态和位置关系计算出当前时刻的碰撞时间,并通过比较其与主动制动阈值的大小,来判断主车纵向是否处于危险状态。
碰撞时间(TTC)为主车和前方障碍物均保持当前运动状态下到发生碰撞所剩余的时间,即
式中:drel为当前时刻主车与前方障碍物的相对距离;vrel为主车与前方障碍物的相对车速;v1为当前时刻主车的车速;v2为当前时刻前方障碍物的速度。计算出的碰撞时间TTC的值越小,则主车与前方障碍物发生碰撞的危险程度越大。
在车辆实际行驶过程中,一个激进并具有较好反应能力的驾驶员,可能会感到因系统设定的主动制动阈值过大而导致激活主动避撞系统的时刻过早,一方面过早的激活主动避撞系统可能会导致驾驶员失去对主动避撞系统的信任而关闭该系统,另一方面也可能会在一定程度上影响交通,降低道路的运行效率;而对于一个保守且反应能力较差的驾驶员,可能会感到由于系统所设定的主动制动阈值过小而导致主动避撞系统的激活时刻过晚,并且车辆停下时与前方障碍物保持的安全距离过小,对于这种类型的驾驶员来说可能并不安全,这种情况会使其过度紧张而产生惊慌感。另外,对于行车状况的不同,驾驶员驾驶时的紧张程度和注意力集中程度也不同,当车辆处于高速行驶且有危险状况即将发生的情况下,由于环境复杂,驾驶员通常较早地使车辆进入紧急制动状态;而车辆处于低速行驶且有危险即将发生的情况下,驾驶员通常会较晚地采取紧急制动措施。因此,基于不同类型驾驶员特性并考虑不同行车状况的纵向危险状态判别模型才能充分保证主动避撞系统的高效工作。本文采用模糊控制来得到不同类型驾驶员和不同行车状况下主动避撞系统中主动制动阈值。
该模糊控制器Ⅰ选取驾驶员类型和主车车速为输入参数,取主动制动阈值TTC1为输出参数。对于驾驶员类型,根据驾驶员制动反应时间的快慢,将驾驶员类型分为激进型、成熟型和保守型,其模糊集合为{aggressive(激进型),ripe(成熟型),conservation(保 守 型)},论 域 范 围 为[1,1.4]。对于主车车速(km/h),其模糊集合为{Z0,P1,P2,P3,P4,P5},论域范围为[0,100]。输出量主动制动阈值的模糊集合为{P1,P2,P3,P4,P5,P6,P7},论域范围为[0.8,1.8]。输入输出的隶属度函数曲线如图1所示。隶属度函数采用三角形函数和梯形函数,模糊关系法则为Mamdani。模糊规则表如表1所示。模糊控制输入输出变量关系曲面如图2所示。
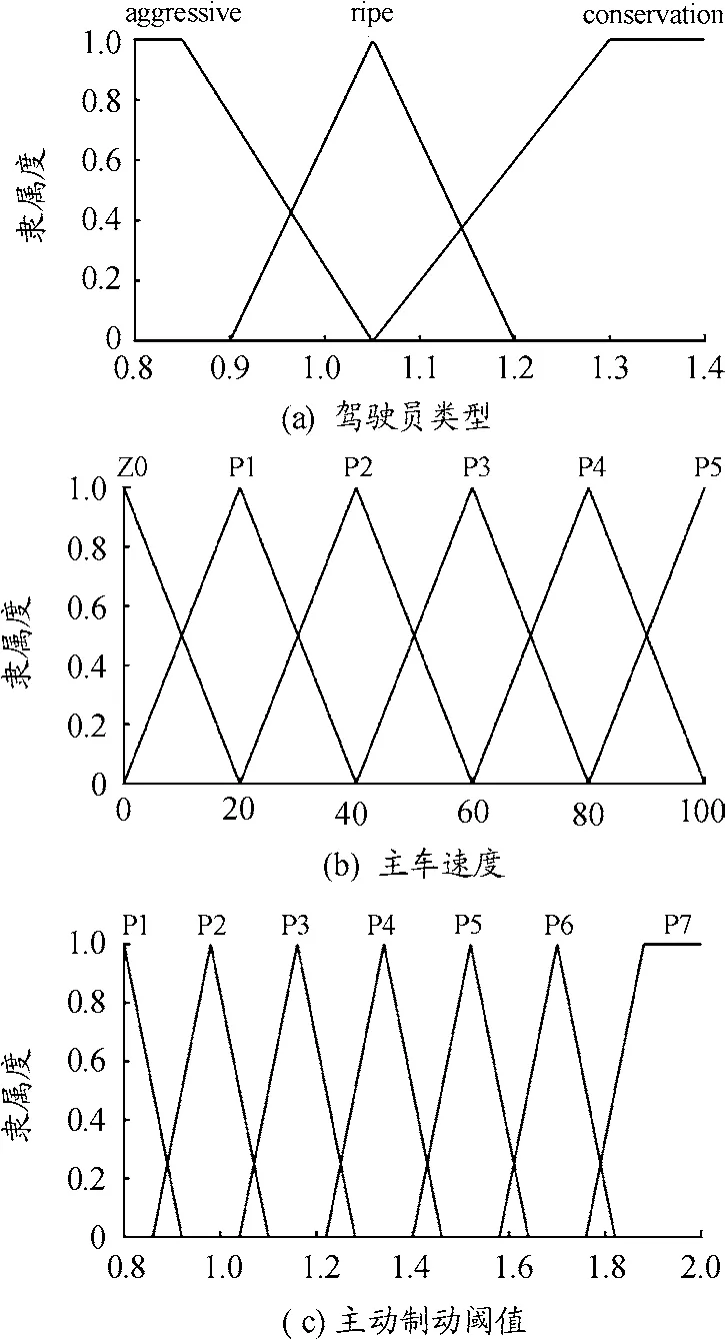
图1 各变量的输入输出隶属度函数曲线
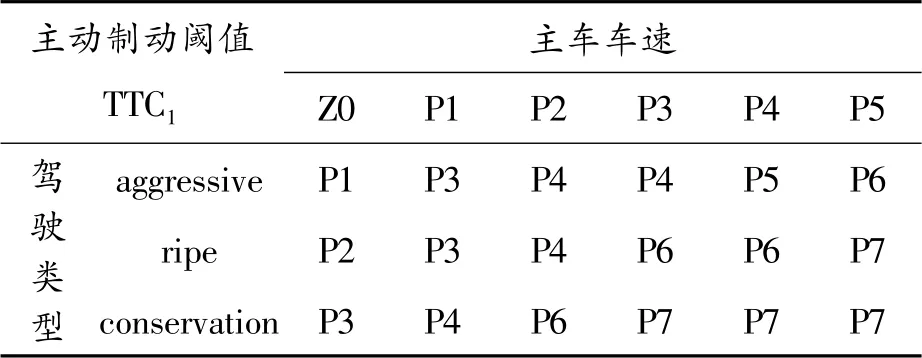
表1 模糊规则

图2 模糊控制输入输出变量关系曲面
车辆行驶过程中前方车道有障碍物出现,当由前后两车运动状态计算出的TTC值小于等于主动制动阈值TTC1时,驾驶员若未能采取避撞措施,则此时纵向危险状态判别模型将车辆的状态判定为纵向危险状态,如图3所示。

图3 纵向危险状态区域划分示意图
1.2 横向危险状态判别模型建立
在车辆行驶过程中,其前方的障碍物主要有同车道或邻车道的车辆、行人和穿越主车所在车道的车辆、行人,其中邻车道的车辆或行人和即将穿越主车车道的车辆或行人可能会导致主车主动避撞系统的“误激活”,因此需要建立横向危险状态判别模型来判断主车前方障碍物是否属于危险目标,从而决定是否需要激活主动避撞系统。首先需要建立数据预处理模块来对传感器模型输出的数据进行处理,得到主车与前方障碍物的横向距离和纵向距离。传感器探测的距离为主车与前方障碍物的直线距离,通过式(3)(4)将主车与前方障碍物的直线距离转换为横向距离和纵向距离。

式中:L为主车与前方障碍物的直线距离;S为主车与前方障碍物的横向距离;D为主车与前方障碍物的纵向距离;θ为前方障碍物相对于主车的方位角。当主车与前方障碍物的横向距离S≥W/2时,判断前方障碍物为非危险目标,因此不会在行驶过程中激活主动避撞系统。当主车与前方障碍物的横向距离S≤W/2时,前方障碍物可能有变道、转向或穿越车道的趋势,则判断该目标车辆为危险目标。如图4所示,当前方障碍物处于1、4区域时,横向危险状态判别模型判断此时为横向安全状态;当前方障碍物处于2、3横向危险区域时,则横向危险状态判别模型判断此时为横向危险状态。其中,W为车道宽度,一般为3.5~4 m,本文取W=3.8 m。
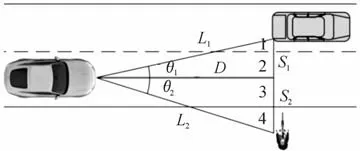
图4 横向危险状态区域划分示意图
当纵向和横向危险状态判别模型都判断此时车辆处于危险状态时,如果驾驶员还是未能采取避撞措施,则车辆主动避撞系统会被激活,代替驾驶员接替车辆控制权,制动压力会自动施加以避免碰撞发生。
2 主动避撞制动系统设计
由于模糊控制具有鲁棒性强、灵活性好的特点,并且具有较强的容错能力,其设计不依靠对象精确数学模型,而是利用语言知识模型进行设计和修正控制算法,适用于解决过程控制中的非线性问题[11],因此采用模糊控制对主动避撞制动系统进行设计,根据不同的行驶状况调整不同的制动措施,更能体现主动避撞系统的智能性。
主动避撞制动系统模糊控制器Ⅱ的输入变量为主车与前方障碍物的相对距离D(m)和主车与前方障碍物的相对速度Δv(km/h),输出变量为主动制动信号S。输入输出参数都用7个语言变量进行描述。主车与前方障碍物的相对距离D的模糊集合为{VS(极小),MS(中小),S(小),M(中),B(大),MB(中大),VB(极大)},其论域范围为[0,70];主车与前方障碍物的相对速度Δv的模糊集合为{N1,N2,N3,N4,N5,N6,N7},其论域范围为[-120,0];主动制动信号S的模糊集合为{VS,MS,S,M,B,MB,VB},其论域范围为[0,1],该输出信号将与车辆最大制动压力相乘得到车辆制动压力。输入输出变量的隶属度函数曲线如图5所示。
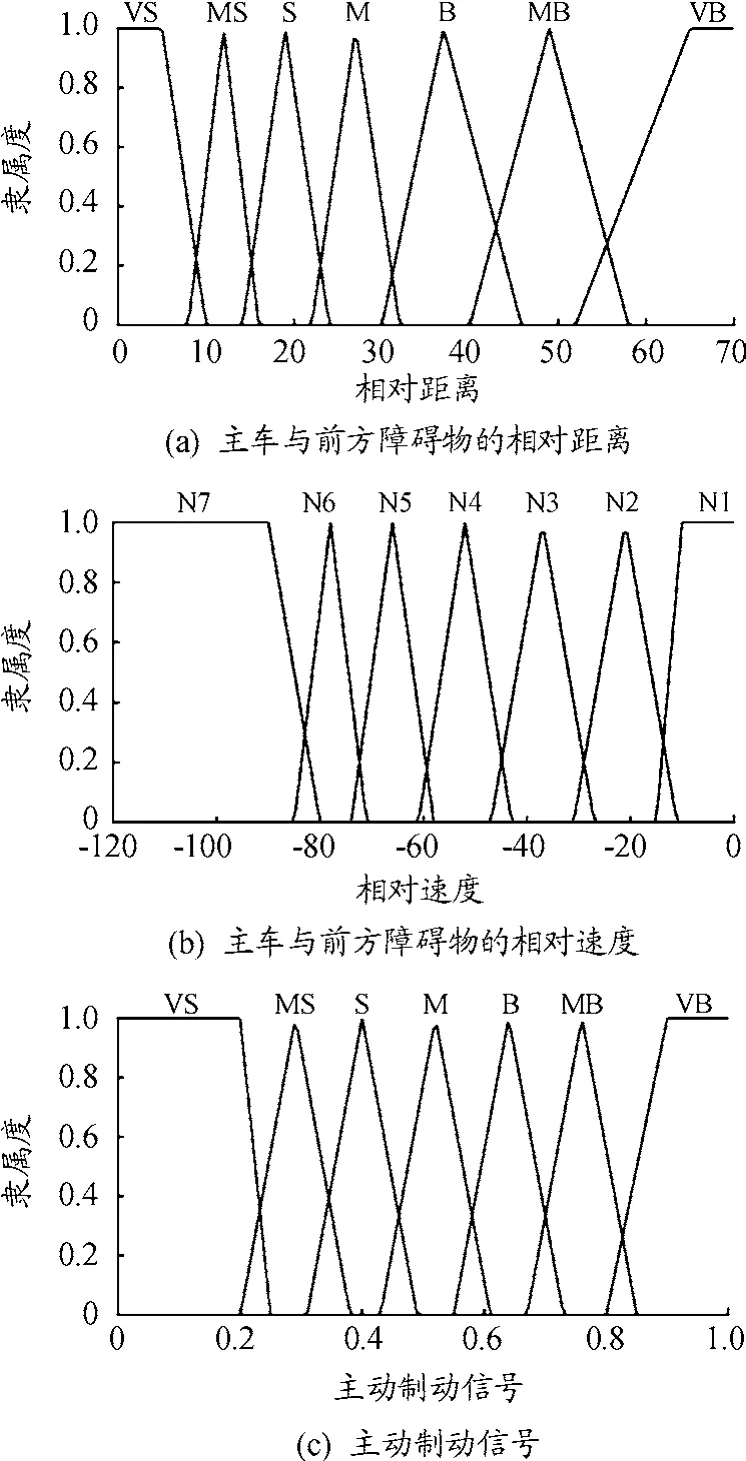
图5 输入输出变量隶属度函数曲线
隶属度函数采用三角函数和梯形函数,模糊关系法则为Mamdani。推理规则如表2所示。模糊控制输入输出变量关系曲面如图6所示。

表2 模糊控制规则
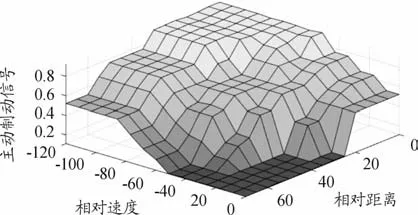
图6 模糊控制输入输出变量关系曲面
模糊语言规则推理部分如下:
1.If(D is VS)and(Δv is N1)then(Sis M)
2.If(D is VS)and(Δv is N2)then(Sis B)
49.If(D is VB)and(Δv is N7)then(Sis M)
3 典型工况下的仿真分析
测试工况参考中国新车评价规程(C-NCAP)中关于车辆自动紧急制动系统的典型测试方法。选取其中前后两车相对速度最大的工况前车静止工况(CCRs)和车辆碰撞远端行人工况(CVFA-50)验证该主动避撞系统的有效性。两种工况将基于Prescan仿真平台进行场景搭建。
3.1 仿真模型搭建
在基于Prescan对车辆主动避撞系统进行仿真验证时,需要通过传感器模型感知前方危险目标的信息。因此,对主车配置传感器模块,选择TIS(Technology Independent Sensor)传感器模型,配置一个探测距离为100 m、水平探测角度为20°的长距离雷达,但是由于长距离雷达的探测角度过小,可能无法探测到近距离两侧的目标,导致主动避撞系统不能进行正确决策,因此再配置一个探测距离为60 m、水平探测角度为50°的短距离雷达,2个传感器的位置均安装在主车前保险杠中心。另外由于在车辆制动过程中会发生前倾现象,如果雷达垂直探测角度过小,则会发生目标信息丢失的现象,从而影响避撞系统控制策略进行正确的决策[12],因此,长距离雷达和短距离雷达的垂直探测角均取15°。
车辆模型选用2D Simple动力学模型,部分参数如表3所示。
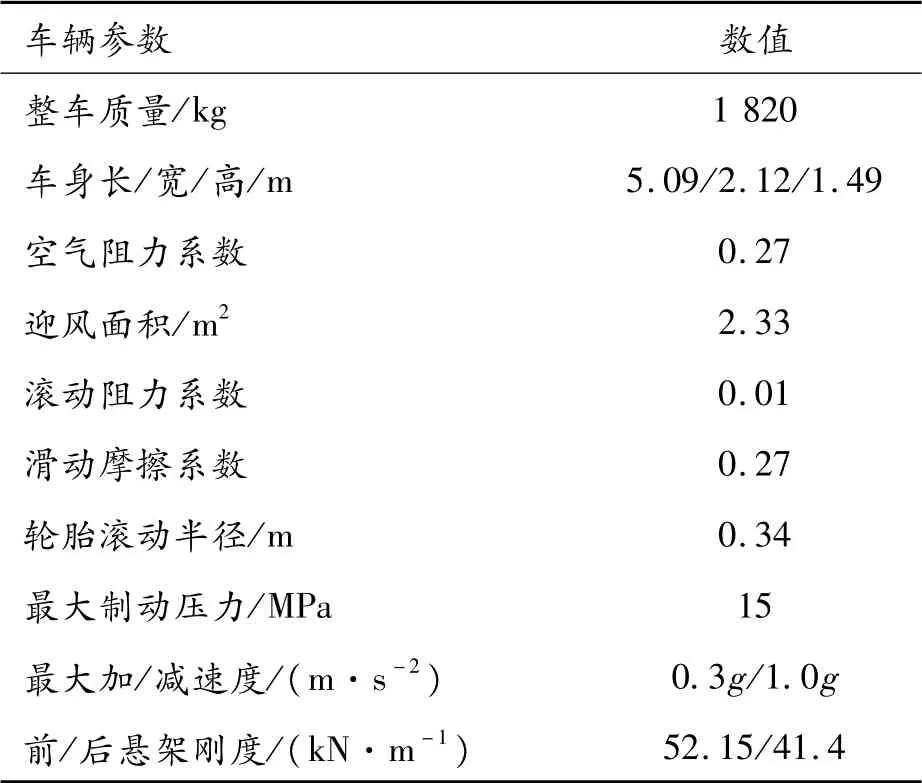
表3 车辆参数
建立CCRs和CVFA-50仿真测试工况。
CCRs工况:主车以一定速度朝前方静止的车辆匀速移动,主车的速度范围为10~60 km/h。
CVFA-50工况:行人以6.5 km/h的速度从测试车辆远端6 m处,沿车辆运动的垂直方向运动,要求若车辆不进行制动,行人将与车辆宽度50%处相撞,主车的速度范围为20~60 km/h。
3.2 典型工况下的仿真结果分析
3.2.1 前车静止工况(CCRs)
在城间道路交通中,车辆一般会以较高车速行驶,因此建立CCRs_1场景:主车以60 km/h的速度接近前方静止车辆,主车与前车的初始距离设为60 m。仿真时长设为8 s,激进型和保守型主动避撞控制策略仿真结果如图7、8所示。

图7 激进型避撞策略曲线(CCRs_1)
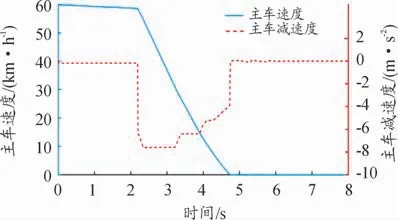
图8 保守型避撞策略曲线(CCRs_1)
由于静止车辆始终保持在主车的正前方,因此横向危险状态判别模型始终判断前车位于横向危险区域,主车处于横向危险状态。对于图7激进型主动避撞控制策略,2.41 s时,由前后两车运动状态计算出的TTC值小于纵向危险状态判别模型输出主动制动阈值1.3 s,因此,此时纵向危险状态模型判断前车位于纵向危险区域,主车处于纵向危险状态,此时满足主动避撞系统激活条件,该系统开始对车辆进行主动制动,车辆进入减速度为-7.6 m/s2的制动状态,且继续接近前方静止车辆,车辆以-7.6 m/s2的减速度保持0.8 s后,随着主车速度的迅速下降,碰撞风险降低,因此减速度也逐渐降低,舒适性有一定的提高,在4.95 s时,主车速度减小为0,车辆停止,此时主车与前车的相对距离为最小值2.2 m,该主动避撞系统能够有效避撞,整个避撞过程经历的时长为2.54 s;对于图8保守型主动避撞控制策略,2.2 s时,TTC小于主动制动阈值1.5 s,此时主动避撞系统被激活,激活瞬间车辆减速度达到-6.4 m/s2,由于碰撞风险较高,随后迅速上升到-7.6 m/s2并保持0.9 s,减速度随碰撞风险的降低而减小。在4.8 s时,主车速度减小到0,此时与前车的最小相对距离为5.6 m,该系统避撞成功,整个避撞过程经历的时长为2.6 s,最大制动减速度保持时间较短,对驾驶员驾驶影响不大。
在城市道路交通中,车辆通常会以较低的车速进行行驶,因此建立CCRs_2场景:主车以30 km/h的速度接近前方静止车辆,主车与前车的初始距离设为60 m,仿真时长设为10 s,激进型和保守型主动避撞控制策略仿真结果如图9、10所示。
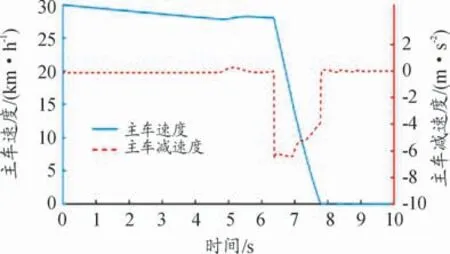
图9 激进型避撞策略曲线(CCRs_2)
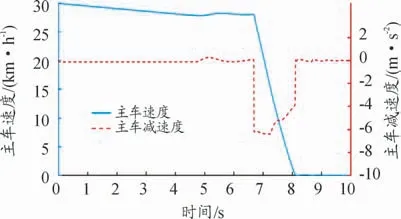
图10 保守型避撞策略曲线(CCRs_2)
静止车辆始终位于主车正前方,因此主车处于横向危险状态。对于图9激进型主动避撞控制策略,6.68 s时,TTC值小于主动制动阈值0.93 s,此时前车处于纵向危险区域,主车处于纵向危险状态,主动避撞系统介入,车辆减速度在0.5 s内从-6.1 m/s2上升到-6.4 m/s2,随着主车速度的迅速减小,碰撞风险开始降低,减速度也随之减小,8.1 s时,主车速度减为0,车辆停止,与前车的最小相对距离为2.1 m,避撞成功,整个避撞过程经历时长为1.42 s,且在制动过程中最大减速度为-6.4 m/s2;对于图10保守型主动避撞控制策略,6.37 s时,TTC小于主动制动阈值1.24 s,此时主动避撞系统介入,车辆减速度迅速达到-6.4 m/s2,在7.84 s时,主车速度减小到0,此时与前车的相对距离为最小值4.6 m,该系统避撞成功,且制动过程中最大减速度达到-6.5 m/s2,整个避撞过程经历时长为1.47 s。相比于CCRs_1测试工况,CCRs_2测试工况2种避撞策略在车辆制动过程中最大制动减速度分别减小了-1.2 m/s2和-1.1 m/s2,制动过程产生的惯性冲击有所减小,驾乘舒适性略有提高。
另外,当主车以10 km/h的速度接近静止车辆,激进型避撞策略和保守型避撞策略分别在TTC等于0.84 s和1.16 s时对车辆进行制动,激进型主动制动阈值较小,避免了干扰激进型驾驶员正常驾驶。制动过程的最大减速度仅为5.1 m/s2,属于中等制动,相比于车辆以60 km/h速度行驶的CCRs_1工况,其最大制动减速度减小了-2.5 m/s2,进一步减轻了车辆制动时产生的惯性冲击和噪声带给驾乘人的不适感,驾乘舒适性也得到进一步提高。该主动避撞控制策略兼顾了车辆高速行驶工况下的安全性和低速行驶工况下的驾乘舒适性。
主车以10~60 km/h的速度分别进行测试,以10 km/h为间隔,在不同速度下,主车完全停止后与前方静止车辆的相对距离如图11所示。对于激进型主动避撞控制策略,车辆主动制动完成后,与前方静止车辆的相对距离保持在1.5~2.2 m;对于保守型主动避撞控制策略,车辆主动制动完成后,与前方静止车辆的相对距离保持在2.2~5.8 m,均可完全避免碰撞危险。

图11 不同速度下相对距离测试结果
3.2.2 车辆碰撞远端行人工况(CVFA-50)
建立CVFA-50场景:主车以60 km/h的速度行驶,主车与行人的初始纵向距离为55 m,行人以6.5 km/h的速度行走,行人与主车中心线的初始距离为6 m,行人行走的路径与主车行驶的路径垂直。仿真时长设为8 s。激进型和保守型主动避撞控制策略仿真结果如图12、13所示。
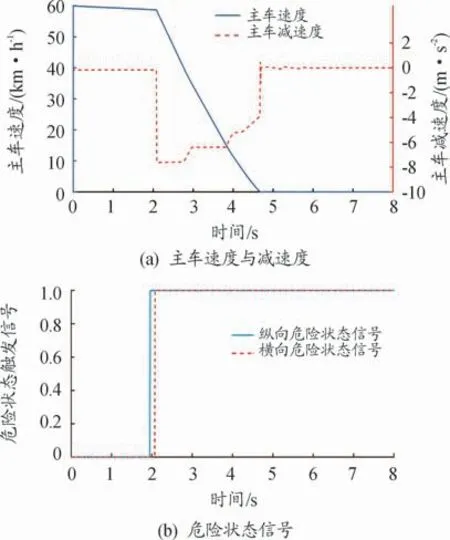
图12 激进型避撞策略曲线(CVFA-50)
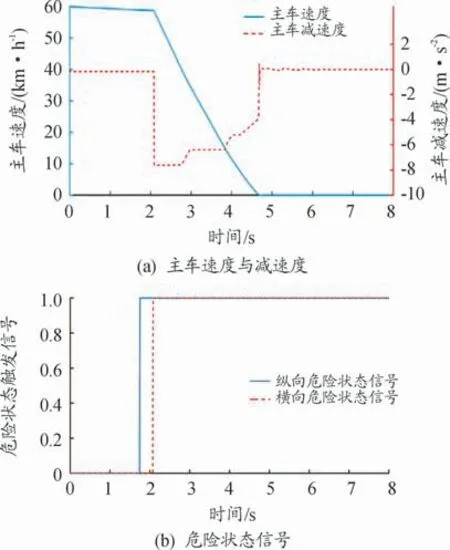
图13 保守型避撞策略曲线(CVFA-50)
对于激进型主动避撞控制策略,如图12(b),在1.95 s时,TTC值小于纵向危险状态判别模型输出的主动制动阈值1.3 s,此时纵向危险状态模型判断行人已位于纵向危险区域,主车处于纵向危险状态,但横向危险状态判别模型判断行人位于横向安全区域,不满足主动避撞系统的激活条件,在2.07 s时行人位于横向危险区域(即行人进入主车所在车道),主车处于横向危险状态,因此主动避撞系统被激活,如图12(a)车辆进入减速度为-7.6 m/s2的制动状态,车辆以-7.6 m/s2的减速度保持0.8 s后,随着碰撞风险降低,减速度也逐渐降低,4.67 s时,主车速度减小到0,车辆停止,此时与前方行人的纵向最小距离为0.5 m,避撞成功,整个避撞过程经历时长为2.6 s;对于保守型主动避撞控制策略,如图13(b),在1.74 s时,TTC小于主动制动阈值1.5 s,纵向危险状态判别模型判断行人位于纵向危险区域,但横向危险状态判别模型判断行人位于横向安全区域,主动避撞系统没有激活,在2.07 s时行人位于横向危险区域,主动避撞系统被激活,此时制动过程与激进型主动避撞策略相同,如图13(a),车辆减速度迅速达到-7.6 m/s2,4.67 s时,主车速度减小到0,车辆停止,此时与前方行人的纵向最小距离为0.5 m,避撞成功。该工况下由于先判断车辆为纵向危险状态,后判断车辆为横向危险状态,因此制动时刻较晚,车辆停止后与前方行人的纵向距离较小。
根据C-NCAP中CVFA-50测试方法的要求,主车分别以20~60 km/h的速度进行测试,以10 km/h为间隔,在不同速度下,主车完全停止后与行人的纵向相对距离如图14所示。对于激进型主动避撞控制策略,车辆制动完成后,与前方行人的纵向相对距离保持在0.5~2.3 m;对于保守型主动避撞控制策略,车辆制动完成后,与前方行人的纵向相对距离保持在0.5~4.8 m,均可完全避免碰撞危险。
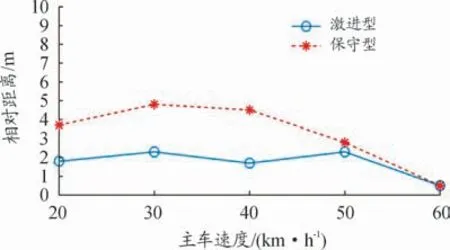
图14 CVFA-50工况测试结果
4 结论
1)综合考虑驾驶员类型和不同的行车状况的因素,建立了纵向和横向危险状态判别模型,通过一个以驾驶员类型和主车车速为输入参数,主动制动阈值为输出参数的模糊控制器Ⅰ控制不同行车状况中主动避撞系统不同的激活时刻,并建立一个以相对速度和相对距离为输入、以主动制动信号为输出的模糊控制器Ⅱ。
2)根据C-NCAP中的CCRs和CVFA-50工况对设计的主动避撞系统进行了仿真验证。仿真结果表明:设计的主动避撞系统在所有工况下均能够有效避免碰撞,在最危险的工况下(CVFA-50,主车速度60 km/h),制动停止后与前方目标保持的最小相对距离为0.5 m。
3)主车在60 km/h的行驶工况下,最大制动减速度为-7.6 m/s2,而在10 km/h的行驶工况下,最大制动减速度为-5.1 m/s2,主动避撞系统在保证车辆高速行驶工况下安全性的前提下,在一定程度上提高了车辆低速行驶工况下的驾乘舒适性,同时主动避撞系统激活时机的差异还满足了驾驶员对该系统的个性化要求,既能防止对激进型驾驶员驾驶时产生不必要的干扰,又能保证保守型驾驶员对安全感的需求。
