基于三点支撑的特种车辆质心测量误差分析
2021-08-06唐平建孙泽林郭晓鹏
唐平建,孙泽林,张 畔,郭晓鹏
(中国人民解放军63870部队, 陕西 华阴 714200)
1 引言
车辆的质心位置是其各零部件质量分布所决定的一个特殊的点,是车辆的固有参数。质心位置的测量对于确定车辆的机动性、操纵稳定性和安全性具有十分重要的意义[1-3]。特别是军用的轮式战车和履带式装甲车辆等特种车辆,质心位置直接影响射击稳定性和作战安全性,进而影响装备作战效能的发挥。为检验特种车辆质心位置是否满足技术指标要求,试验鉴定时必须进行严格测量。本文对基于三点支撑的可倾斜平台测量法进行深入研究,分析得出质心测量的主要误差来源及影响程度,可为车辆质心测量的误差评定及设备研制提供理论依据。
2 质心测量原理
2.1 测量设备的系统组成与总体结构
如图1所示,特种车辆质心测量设备主要由测试台面系统、电气控制系统和液压系统等组成。其中测试台面系统主要由测量平台、称重模块(包含A、B、C三个称重传感器)、测角装置、测距装置和台面锁紧系统等组成;电气控制系统主要由琴台式操作台、可编程控制器(PLC)、工控机及软件、数据采集模块、驱动控制模块等组成;液压系统主要由液压站和液压油缸及其附件等组成。
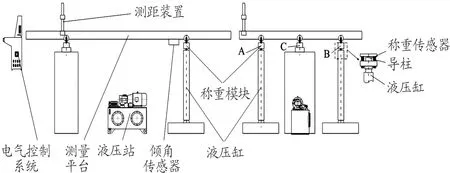
图1 质心测量设备总体结构布局示意图
2.2 质心测量原理[4-5]
2.2.1建立质心测量坐标系
如图2所示,以旋转支点为原点建立平台坐标系OXYZ,被测特种车辆坐标系为OX′Y′Z′的原点坐标相对于平台坐标系为(x1,y1,z1),质心坐标相对于平台坐标系为(xc,yc,zc)。水平时,两个支撑液压缸支点坐标为(xd1,yd1,0)、(xd2,yd2,0)。为便于同步控制液压缸的升降,理想状态下xd1=xd2,yd2=-yd1。
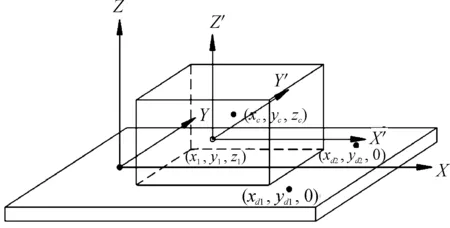
图2 质心测量坐标系
2.2.2测量平台质量和质心测量
设测量平台的质量为M0,质心坐标为(x0,y0,z0)。测量平台自动调平并保持水平,测量出测量平台的质量M0,依据力矩平衡可得出测量平台的质心x0和y0。
(1)

(2)
(3)
使测量平台倾斜角度θ,如图3所示,由力矩平衡可得出z0的值。

图3 测量平台倾斜示意图
(4)
设备调试时,通过多次测量取平均值的方法确定测量平台的质量M0和质心坐标(x0,y0,z0),可将误差控制到很小的范围内,在后续的计算中均认为是已知的常量。
2.2.3特种车辆质心测量原理
将被测特种车辆平台置于测量平台上,质心测量原理如图4、图5所示。
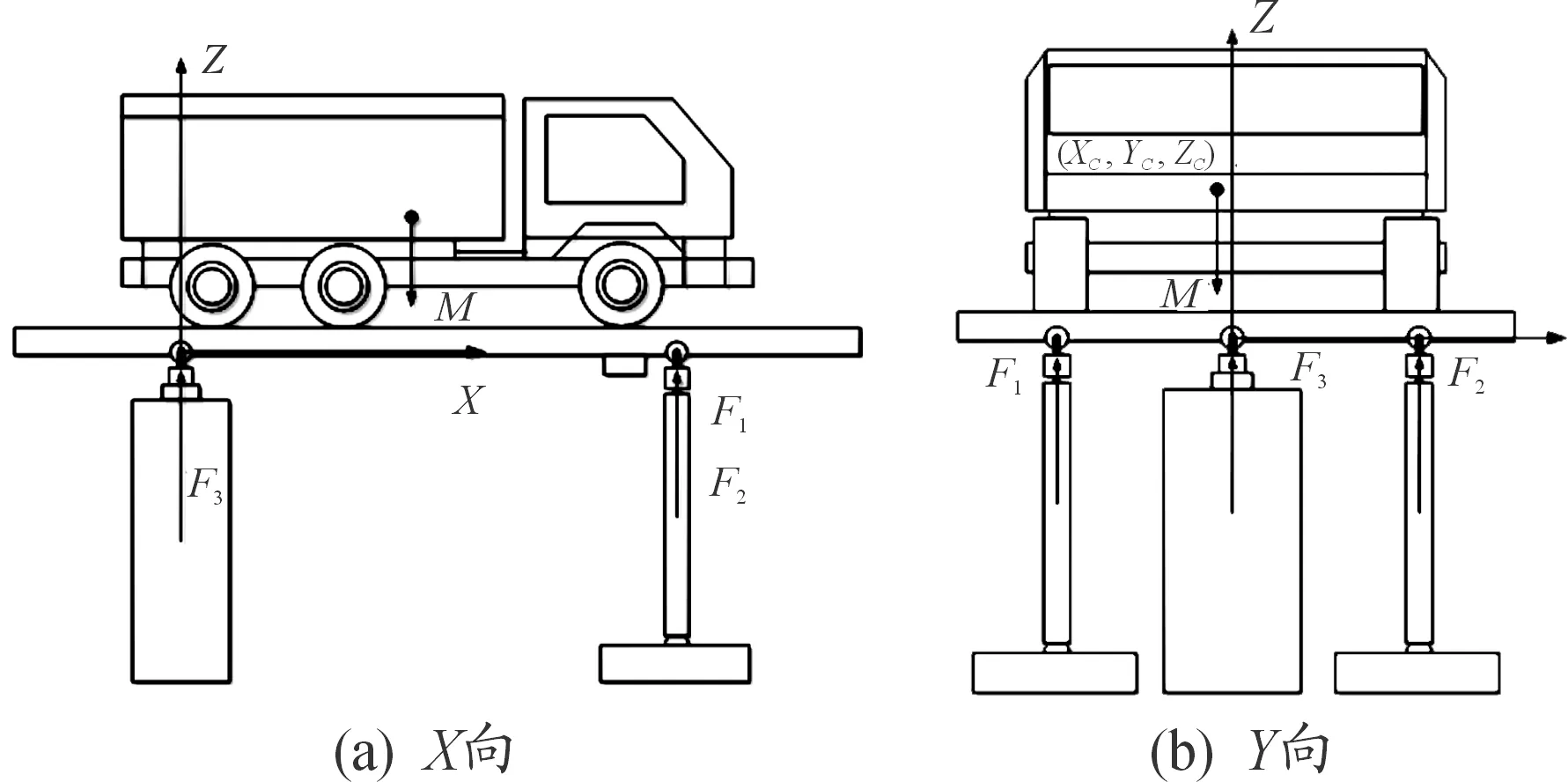
图4 水平方向质心测量原理示意图
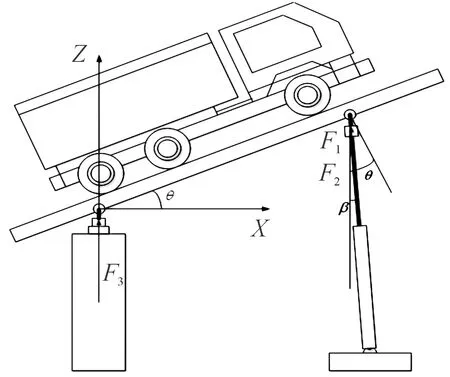
图5 Z向质心测量原理示意图
由静力平衡可知:
M=F1+F2+F3-M0
(5)

(6)

(7)

(8)
其中:M为被测特种车辆质量;F1、F2、F3为分别为平台水平时称重传感器1、2、3的读数;xc为特种车辆x向质心;yc为特种车辆y向质心;zc为特种车辆z向质心;θ为测量平台倾斜角度;F1′、F2′为分别为平台倾斜角度θ时传感器1、2的读数。
以上求解得出的质心坐标(xc,yc,zc)为测量平台坐标系下的坐标,利用平台的测距装置测量数据进行坐标转换,即可得出在被测特种车辆坐标系的质心坐标。
(9)
3 误差分析与计算
在特种车辆质心测量系统中,影响测量精度的因素主要是设备加工安装、物理量测量引起的误差、以及测量过程中引起的平台变形等。其中,设备加工安装引起的误差有平台机械加工和总体装配误差、液压缸上下球绞的位置测量误差和称重传感器的安装误差等,这些误差属于测量设备的系统误差,设备安装完成后认为不再改变,可采用提高安装工艺水平和加工精度等方法予以标校[6]。物理量测量引起的误差包括称重传感器的测量误差、倾角传感器的测量误差和被试车辆初始位置测量误差等,这些误差属于测量随机误差,可通过选择高精度传感器的方法来降低影响。
3.1 测量平台变形引起的误差
为满足大多数特种车辆的测量需求,测量平台台面的尺寸要求为4 m×8 m,采用U型钢结构形式进行焊接。设计选用350×80的U型钢进行焊接,测量平台上方铺设花纹钢板。质心测量的特种车辆较重的一般为履带式装甲车辆,某型车辆的履带中心距2 800 mm、履带宽度580 mm、接触长度4 500 mm,由此选择加载处为中心距为2 800 mm的两个长宽为4 500 mm×580 mm的长方形,按最大质量为50 t对平台的受力进行分析,采用SolidWorks Simulation进行有限元分析得出测量平台的变形如图6所示,测试平台的最大位移产生在平台两侧边缘最大约0.54 mm。由于该变形与被试车辆的质量和位置有关,无法精确得出每次测量的误差值,采用最大化原则将该误差计入系统误差中。
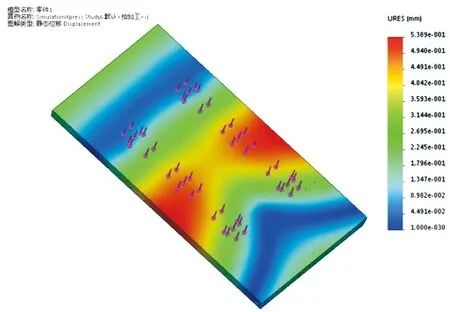
图6 测量平台变形图
3.2 车辆初始位置测量引起的误差
确定车辆初始位置时,X向采用刻度尺人工测量,取人为因素和刻度精度综合误差为0.5 mm,记为σxc2=0.5 mm。Y向由激光测距传感器测量,其在距离2 m内综合测量误差很容易达到0.5 mm,记为σyc2=0.5 mm。Z向采用游标高度尺人工测量,取人为因素和刻度精度综合误差为0.2 mm,记为σzc2=0.2 mm。
3.3 物理量测量引起的误差[7-9]
根据误差传递理论,对式(6)、式(7)、式(8)分别求偏导,可得出物理量测量引起的误差如下:
质心水平方向的测量误差和:
(10)
(11)

(12)
(13)
(14)
(15)
(16)
(17)
(18)
(19)
(20)
(21)
质心垂直方向的测量误差:
(22)
(23)
(24)
(25)
(26)

(27)
(28)
(29)
(30)

3.4 误差综合分析及保精度策略
测量平台台面的尺寸为4 m×8 m,测量平台结构设计时xd1=xd2=4 000 mm、yd2=yd1=1 200 mm、M0=16 000 kg。假定平台为均匀材质,则有x0=2 000 mm、y0=0、z0=300 mm。σxd1、σxd2、σyd1、σyd2、σH均为长度测量及安装误差,根据现代安装工艺和测量手段,可按1 mm的误差量进行控制。倾角传感器选择上海派恩科技有限公司NG3U圆形倾角传感器,测量范围±30°,精度达0.003°。称重传感器可选择精度为0.03%或0.05%的传感器,误差随质量增大而增大。将以上数据代入式(10)~式(30),可得出x、y向质心测量误差与被试车辆质量的关系(如图7、图8所示)、z向质心测量误差与平台倾斜角度及被试品质量的关系(如图9、图10所示)。测量平台自身变形引起的误差采用最大化原则计入系统误差中,由2.1已知该误差最大为0.54 mm,作为常数在图7~图10中予以考虑。

图7 x向测量误差与被试车辆质量的关系曲线
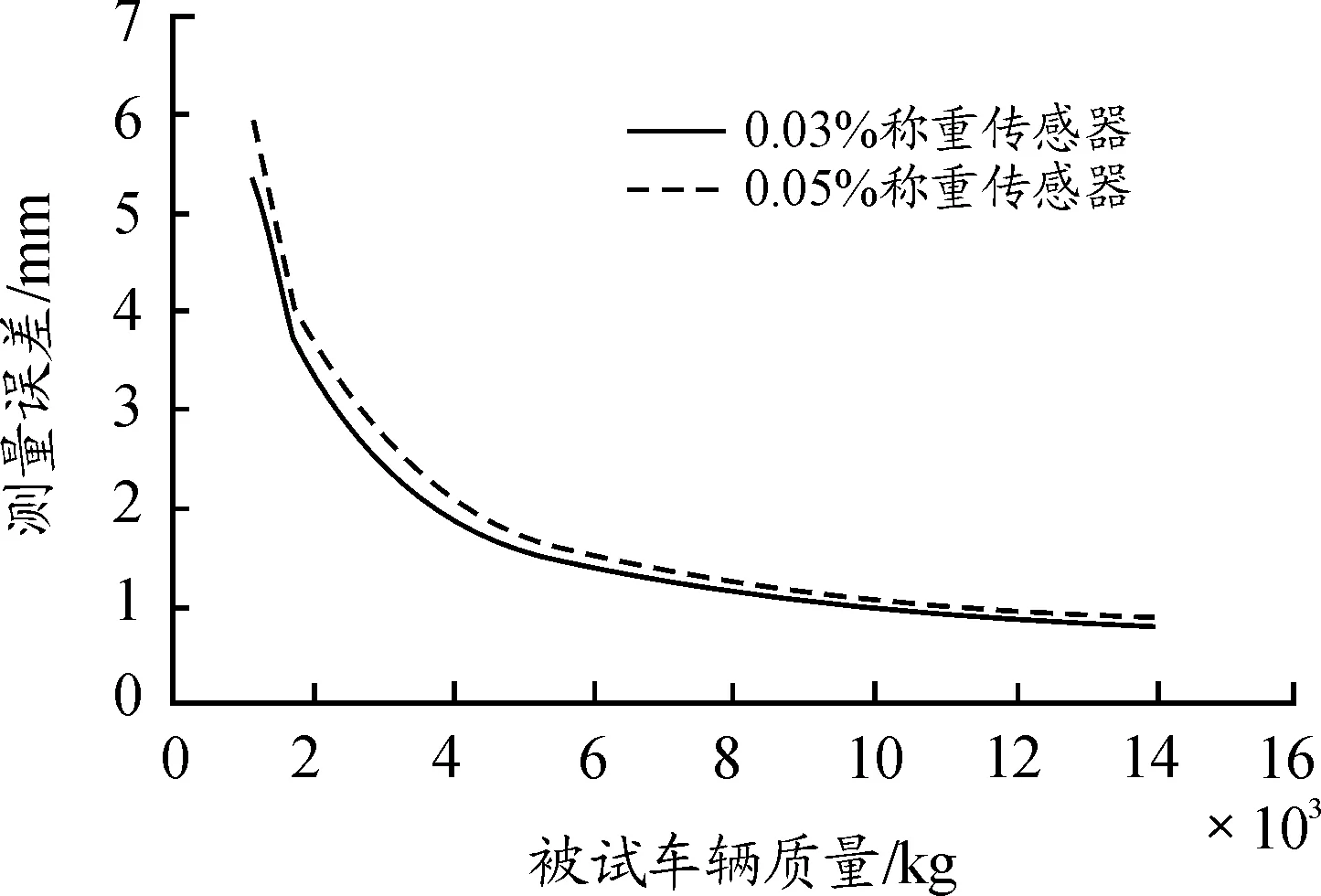
图8 y向测量误差与被试车辆质量的关系曲线

图9 z向测量误差与平台倾斜角度的关系曲线
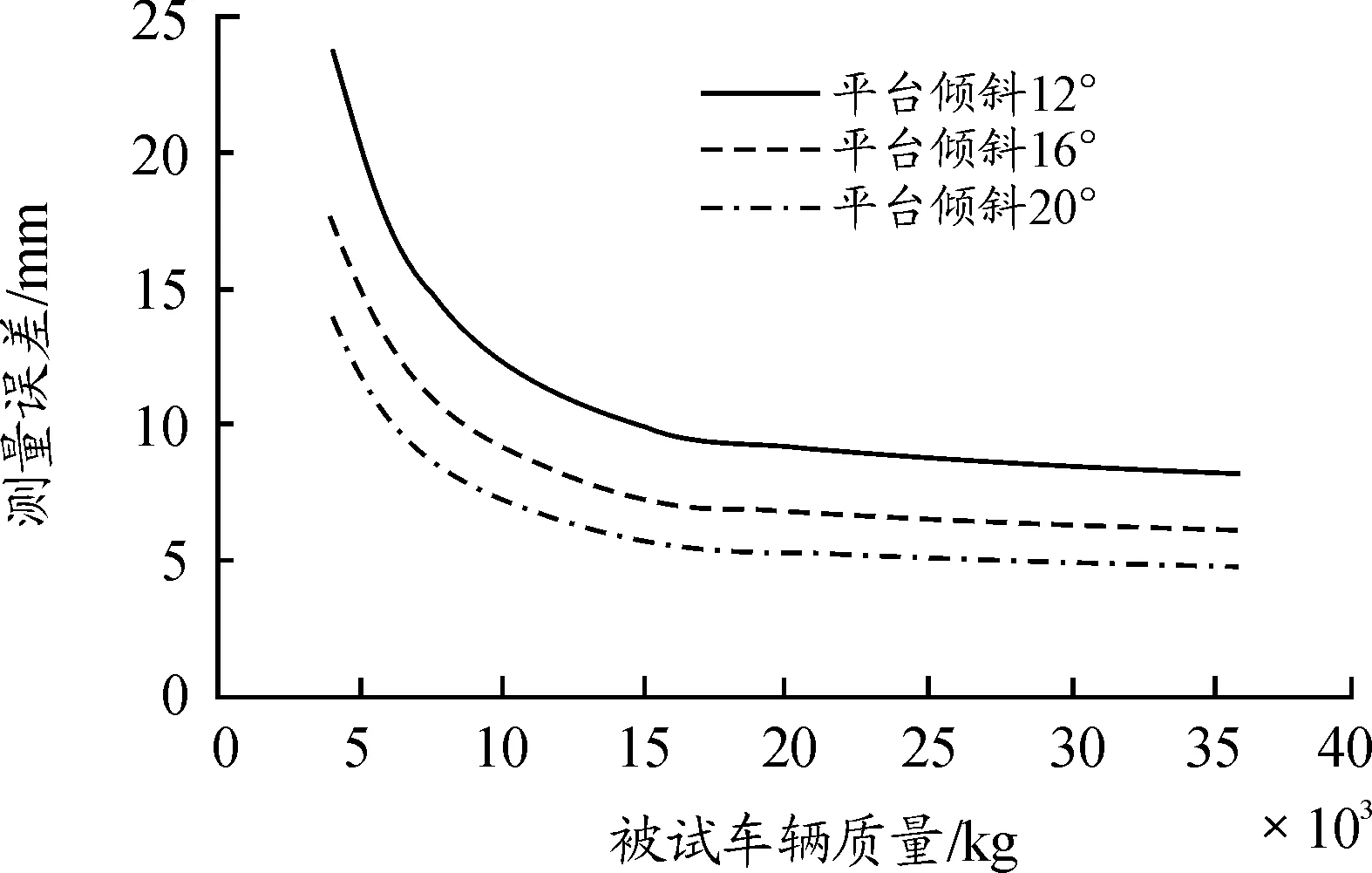
图10 z向测量误差与车辆质量的关系曲线
从图7、图8可以看出,x、y向质心测量误差随被试车辆的质量增大而减少,称重传感器的精度越高测量误差越小,被试车辆的质量>7 t时测量误差逐渐趋于稳定。x向的测量误差采用0.03%精度称重传感器在车辆质量为2.0 t时可达到5 mm以内,而采用0.05%精度称重传感器则需要车辆质量约3.1 t;由于误差传递系数σyd1、σyd2比σxd1、σxd2较小,y向测量误差相比x向的测量误差更小一些。因此,在x向的测量误差满足测量需求的情况下,y向测量误差也必然满足测量需求。
从图9、图10可以看出,z向质心测量误差随平台倾斜角度和被试车辆质量的增大而减小,称重传感器的精度越高测量误差越小。被测车辆质量为10 t时,采用0.03%精度称重传感器,z向测量误差在倾斜角度15°时可达到10 mm以内,而采用0.05%精度称重传感器则需要倾斜到19°。在车辆质量逐渐增大时,要达到相同的测量精度平台的倾斜角度可以适当减小。为确保质心测量时的安全性,平台倾斜角度不宜过大,一般应控制在20°以内,依据图10可得出车辆质量需在6.5 t以上才能确保测量精度优于10 mm。
综上所述,在特种车辆质量确定的情况下,x、y向质心测量精度相比z向更高,z向测量精度要与测量安全性进行权衡设计。
4 结论
根据基于三点支撑方式的特种车辆质心测量的方法与原理,分析了主要误差来源,利用误差传递理论推导了误差计算公式,得出了质心测量误差与被试车辆质量和平台倾斜角度之间的关系,可为特种车辆质心测量的误差评定及质心测量设备研制提供理论依据。