基于EKF的毫米波雷达多目标跟踪算法研究
2021-08-06刘凤江白冬杰李舒悦
邱 成,王 浩,刘凤江,白冬杰,云 峰,李舒悦,赵 川
(1.北京交通大学 机械与电子控制工程学院,北京 100044;2.北京精密机电控制设备研究所,北京 100076;3.北京华航无线电测量研究所,北京 100013)
0 引言
伴随着大众对汽车主动安全问题的日益重视,车载毫米波雷达多目标跟踪也成为研究热点,其性能直接影响着整个车辆路况环境监测系统的可靠性。近年来,国内外科研人员围绕车载毫米波雷达进行了大量研究[1⁃8]。这些研究成果对车载毫米波雷达的发展起到了积极的推动作用。
在车载毫米波雷达对多个目标车辆进行跟踪的过程中,需要从大量的噪声中提取出有效的量测数据。在同样的信噪比下,为了进一步提高跟踪精度,需要根据目标运动特性进行有效滤波。在线性系统中卡尔曼滤波器得到广泛应用,其滤波误差的均方阵可通过算法直接获得,是一种递推最优理论。然而,现实道路状况中,车辆的运行状态多为非线性的,致使卡尔曼滤波器有时难以对目标进行有效滤波。对于非线性滤波问题,至今也没有完善的解决办法。
针对以上分析,本文提出了基于扩展卡尔曼滤波器(Extended Kalman Filter,EKF)的毫米波雷达多目标跟踪算法,其主要运用扩展卡尔曼滤波器解决目标车辆非线性运动状态的滤波问题,以实现车载毫米波雷达对多个目标的有效跟踪。
1 跟踪对象的数学模型
1)状态方程
当汽车在道路上作匀速直线行驶时,离散系统中tk时刻目标车辆的运动状态(xk,yk)为:

式中:(x0,y0)为跟踪目标的初始坐标;vx及vy分别为目标对象沿两个方向的速度;T为采样时间。
按照递推形式改写,式(1),式(2)可以表示为:

目标的状态方程可表示为:

式中:X(k)为状态向量;F(k)为转移矩阵;V(k)为系统过程噪声,并假设目标初始状态、系统过程噪声及量测噪声之间相互独立。
考虑目标运动过程中的控制信号,其状态方程可表示为:

利用增加状态向量维数的方法,可以进一步提高估计的准确性,但也会造成计算量相继变大的缺点。因而,在符合要求的前提下,尽可能选择简易模型。
2)量测方程
雷达对测量过程的假设,用量测方程可表示为:

式中:Z(k)为量测向量;H(k)为量测矩阵;W(k)为量测噪声,通常认为量测噪声服从高斯分布,其协方差用R(k)表示。
假设量测噪声和过程噪声序列互不相关,且系统的初始协方差矩阵为P(0| 0),初始状态估计为与线性情况类似,假设k时刻的估计为:

它不是一个近似的条件均值,其相伴协方差矩阵为P(k|k)。因为(k|k)是非精确的条件均值,所以,P(k|k)是近似的均方误差,而非协方差。但是,通常还是称其为协方差。
2 多目标跟踪算法
车载毫米波雷达多目标跟踪算法主要包括航迹起始、航迹数据关联、航迹跟踪滤波、航迹管理等几个方面。算法采用EKF 状态估计方法,能够在线跟踪多个运动目标,且可以去除静止目标。多目标跟踪算法处理的详细流程如图1 所示。
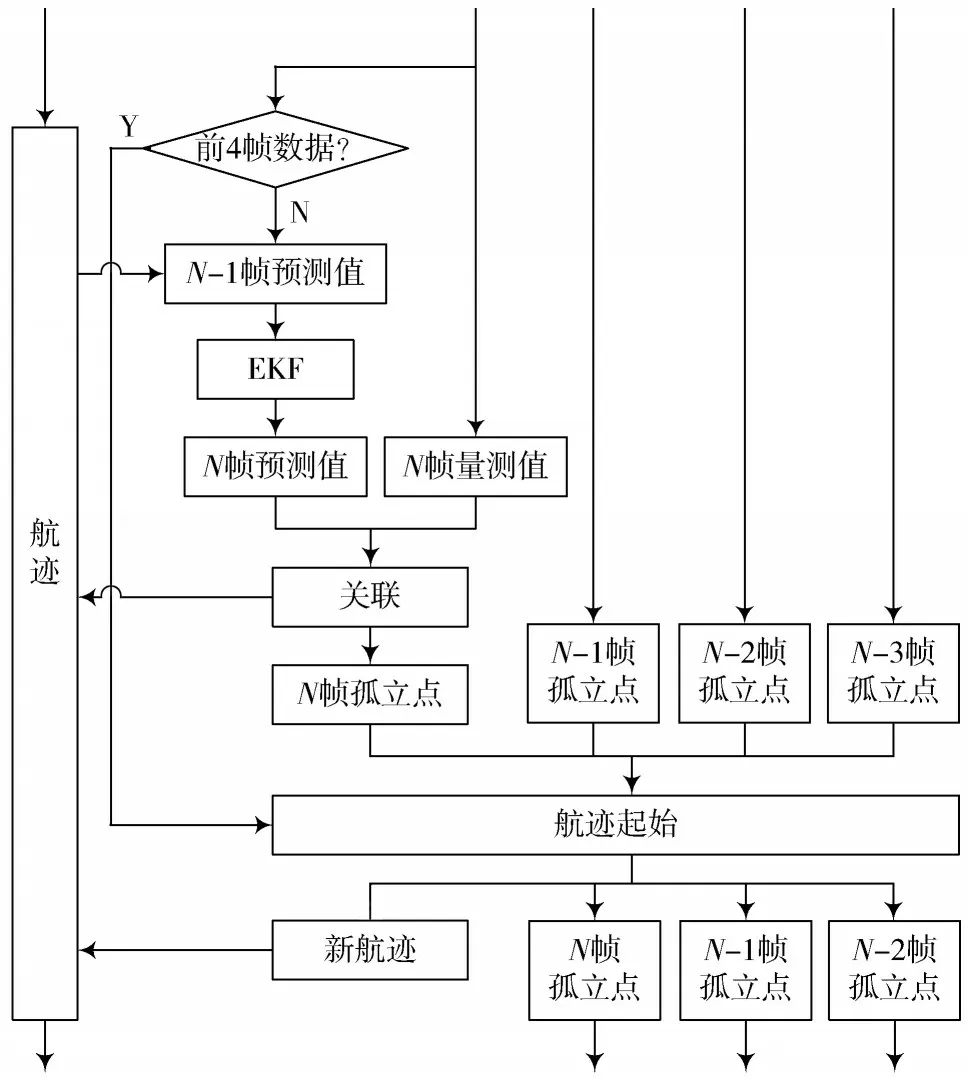
图1 多目标跟踪算法处理的详细流程图
扩展卡尔曼滤波的实质是将非线性滤波问题近似转化为线性滤波问题,以此可以参照卡尔曼滤波过程来解决工程上的非线性问题,是应对非线性滤波问题较为可行的方法[9⁃12]。
考虑到实际情况中车载毫米波雷达多目标跟踪对计算量的要求,其计算过程如下:
状态的一步预测:

协方差的一步预测:

量测的一步预测:

量测预测协方差的计算:

增益的计算:

状态的更新:

协方差的更新:
海洋中生活着各种神奇的生物,有令人闻风丧胆的“海怪”,也有优雅的“美人鱼”。不知你是否听说过,海洋中还有一种被人称作“海天使”的神奇物种,它晶莹剔透,娇小可爱,虽然科学家已在北极冰海和日本北海道的冰原下发现了它的踪迹,但至今仍摸不清它的来历,这更给海天使增添了几分神秘色彩。

式中I是与协方差相对应的单位矩阵。
3 实验与分析
3.1 实验情况简介
车载实验所用的毫米波雷达为MFSK 雷达,通过工装安装在实验车辆的尾部。图2 给出了毫米波雷达的车载安装图。

图2 毫米波雷达的车载安装图
本实验共设置了4 种实验情景,分别就单目标车辆和双目标车辆在远离和接近车载毫米波雷达的过程中进行了回波采集,以获取目标车辆的距离、速度、角度等信息。实验参数设置如表1 所示。

表1 实验参数设置
3.2 实验结果分析
单个目标车辆从远处以30 km/h 的速度向雷达驶近,对此过程中的目标车辆进行跟踪,跟踪结果如图3所示。可以看出,当前算法可以实现对目标车辆的跟踪。但在跟踪过程中,位于50 m 左右的地方存在未知目标,其返回波的能量幅值高于真实目标,致使在跟踪过程中将其当作是静止的车辆目标。

图3 单车30 km/h 动态接近回波采集跟踪结果图
在单个目标车辆驶近雷达之后,将其按照30 km/h的速度远离雷达,在此过程对目标车辆进行跟踪,图4为具体跟踪结果。从跟踪结果可以看出,当前算法可以实现对目标的跟踪。在雷达开机过程中,有一未知目标出现在雷达探测范围内,但由于所探测到的不连续点迹未达到跟踪条件,算法未对其进行跟踪。

图4 单车30 km/h 动态远离回波采集跟踪结果图
图5 和图6 为双车以30 km/h 的车速进行动态接近回波采集,目前算法能够对目标进行跟踪。但由于在跟踪过程中,雷达在部分区域未探测到连续点迹,导致有部分航迹缺失。

图5 双车(间距10 m)30 km/h 动态接近回波采集跟踪结果图

图6 双车(间距20 m)30 km/h 动态接近回波采集跟踪结果图
图7 和图8 为双车以30 km/h 的车速进行动态远离回波采集,目前算法能够对目标进行跟踪。但是,双车间距10 m 跟踪时,近距离航迹偏离目标实际位置;双车间距20 m 跟踪时,部分区域未完全形成连续航迹。
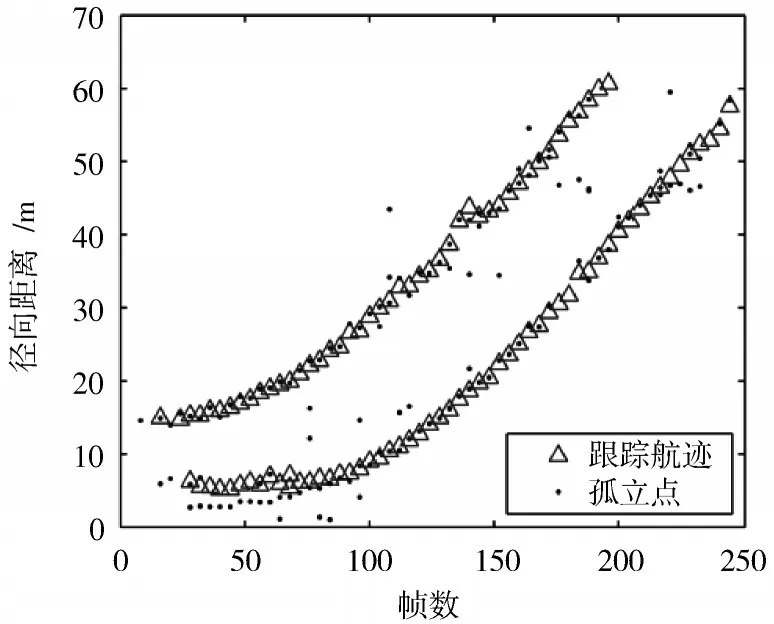
图7 双车(间距10 m)30 km/h 动态远离回波采集跟踪结果图
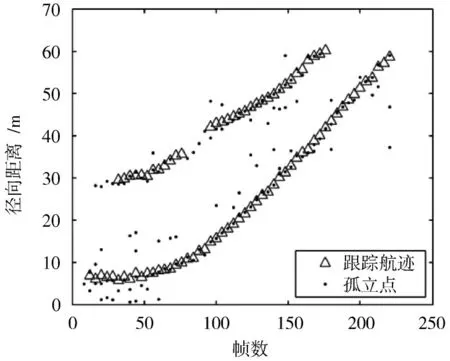
图8 双车(间距20 m)30 km/动态远离回波采集跟踪结果图
1)量测噪声协方差矩阵的计算中,距离测量误差方差和角度测量误差方差的值选取困难,造成量测噪声协方差矩阵的初始状态与其真实值有较大的误差,从而导致预测偏差较大的问题。
2)在实际的滤波过程中,距离和角度的精度会直接影响量测矩阵。但是由于雷达的测量精度有限,两者的值存在较大的误差,而在角度矫正公式中:

参数α及β的大小是依据经验值而定,使得矫正后的角度相比其真实值仍存在较大误差,难以满足要求。
3)扩展卡尔曼协方差矩阵初值选取困难。在扩展卡尔曼滤波器的使用过程中,其稳定性和状态估计精度受到了过程中潜在的非线性因素的较大影响,而噪声的统计特性也会对其滤波效果产生影响。在滤波过程中,量测噪声协方差R(k)和过程噪声协方差Q(k)均不发生变化,假设两矩阵预先估计的准确度不高,将会在后续过程引起误差累计,进而影响整个过程,产生滤波发散。
4)运用泰勒级数展开的方法,对雅克比矩阵hX(k+1)进行展开,在这个过程中对其高阶项的忽略,也可能是滤波发散的原因。
4 结语
本文针对非线性系统,对扩展卡尔曼滤波算法的滤波过程及其滤波参数计算进行了推导,结合航迹起始、航迹数据关联、航迹管理等算法,提出了一种基于扩展卡尔曼滤波器的车载毫米波雷达多目标跟踪算法,并设计实验对其滤波跟踪效果进行了验证。通过实验结果可知,该算法可以对车载毫米波雷达探测到的目标车辆信息进行跟踪滤波,但仍然存在一些需要完善的地方,这也是下一步的研究内容。
