临近空间防御作战拦截弹制导与控制关键技术综述
2021-08-05雷虎民骆长鑫周池军王华吉邵雷
雷虎民 骆长鑫 周池军 王华吉 邵雷

摘要:为满足临近空间高超声速目标防御作战需求,聚焦拦截弹超远程超高速拦截制导和控制关键技术,对“中制导”、“中末制导交接班”、“末制导”、“直接力/气动力复合控制”以及“多拦截弹协同拦截”等五个方面的研究进展进行综述,围绕“基于区域分割的多拦截弹协同弹道生成”、“基于分布式优化的多拦截弹协同弹道修正”以及“多拦截弹协同末制导律的动态捕获区”三个未来需要重点发展的方向进行展望,为临近空间拦截弹制导控制技术研究提供参考和借鉴。
关键词: 临近空间防御作战;直接力/气动力复合控制;协同拦截;弹道在线修正;中末制导交接班
中图分类号:TJ765;V448 文献标识码: A 文章编号: 1673-5048(2021)02-0001-10
0 引 言
临近空间高超声速飞行器是一类飞行马赫数大于5的新型飞行器[1-2],其作为未来战争的快速高性能远程攻击武器,相比于传统航空器,具有飞行速度更快、突防能力更强以及作战半径更远等显著优势[3-4]。目前美俄已在高超声速助推滑翔飞行器武器化进程中占领先机,对我国空天防御作战提出了极大的挑战,开展临近空间高超声速目标新型拦截技术研究已迫在眉睫[5]。
高超声速飞行器兼具了弹道导弹的高速特性与巡航导弹的高机动特性,且具有良好的隐蔽能力和突防能力,能突破现有防空反导体系。高超声速飞行器这些得天独厚的性能优势,使得临近空间防御作战面临“四难”问题。
(1) 发现难。临近空间高超声速飞行器飞行距离远,其发射地与目的地之间距离可达数千公里甚至上万公里,通常需要借助天基探测平台或远程预警雷达进行探测,然而,现阶段的远程预警手段在面对高超声速飞行器时存在三个方面的不足。一是天基预警能力有限,天基预警系统探测空域有限,无法全域覆盖探测,发现能力弱。二是地基预警能力不足,高超声速目标RCS小、等离子体鞘套等因素使得虚警率高,搜索能力弱。三是目标识别能力不足,缺乏高超声速目标特征数据库,难以实现有效识别。
(2) 探测难。临近空间再入滑翔目标利用高升阻比气动外形,可在临近空间稀薄大气环境中依靠升力进行长时间飞行,并利用侧向机动形成较大的打击区域[6]。由于目标的飞行空域特殊且速度极快,目标本体与周围稀薄大气相互作用,形成等离子体鞘套,电磁波穿过等离子体鞘套时能量被吸收、散射和反射,造成信号幅值衰减、相位畸变,对现有探测系统的预警时间和探测精度带来严重影响[7]。另外,由于地球曲率影响,即使地面雷达具有足够的威力,单站雷达也难以独立发现目标。作为进攻武器的高超声速飞行器,其RCS甚至可以达到0.01 m2左右,这又大大增加了预警探测难度。
(3) 跟踪难。临近空间高超声速飞行器飞行速度极快,超出绝大多数雷达数据处理波门,即使能探测到目标,也难以实现有效跟踪。另外,防御方很难预测未来目标的机动时刻、幅值以及频率[8-9],目标的非弹道式随机机动给探测系统持续高精度跟踪带来巨大困难。虽然目前国际上关于机动目标跟踪的研究已经取得了一系列成果,但对强机动目标的跟踪,不管在理论上还是实践上都有较高的技术要求,仍然是一个具有挑战性的问题。
(4) 拦截难。首先,临近空间高超声速目标机动性
强,飞行过程中没有固定的轨迹,在其主要飞行空域空
气密度很小,空气舵的效率很低,拦截弹需要使用姿轨控动力系统实施控制,这对姿轨控发动机的持续、快速、准确控制带来了很大的挑战。其次,要求拦截系统快速反应。临近空间高超声速飞行器具有极高的速度,十几分钟内就能实施跨洲际机动,对目标进行打击,留给防御方的反应时间非常短。
实际上,一方面,由于临近空间防御作战面临的“发现难”、“探测难”以及“跟踪难”问题,显著压缩了拦截弹的拦截时间窗口,大幅提高了拦截系统的反应时间要求,极大降低了拦截过程的容错率;另一方面,由于高超声速飞行器的高速性和强机动性,也给拦截过程带来了困难,这就对拦截弹的制导控制系统提出了更高的要求。因此,積极寻求反临拦截弹制导与控制关键技术的突破,是临近空间防御作战的一个重要方向。
临近空间高超声速目标防御作战属于超远程超高速拦截问题,把弹道和导引方法完全固联,严重阻碍了中高空地空导弹的发展,使得提高导弹射程和制导控制精度成为难以逾越的障碍[10]。为了扩大转瞬即逝的拦截窗口,拦截弹的射程和速度是关键突破口,而弹道与制导律分离设计是增大射程、提高速度的根本途径。鉴于此,高精度的复合制导技术已成为反临近空间高超声速目标的核心技术之一,在该方面很多学者取得了一些具有重要参考价值的研究成果。本文立足临近空间防御作战背景,围绕拦截弹的“中制导”、“中末制导交接班”、“末制导”、“直接力/气动力复合控制”以及“多拦截弹协同拦截”五个方面的研究进展,对拦截弹制导与控制关键技术进行综述,并对未来研究方向进行展望。
1 反临拦截弹制导控制关键技术研究进展
1.1 中制导关键技术
1.1.1 中制导弹道设计方案
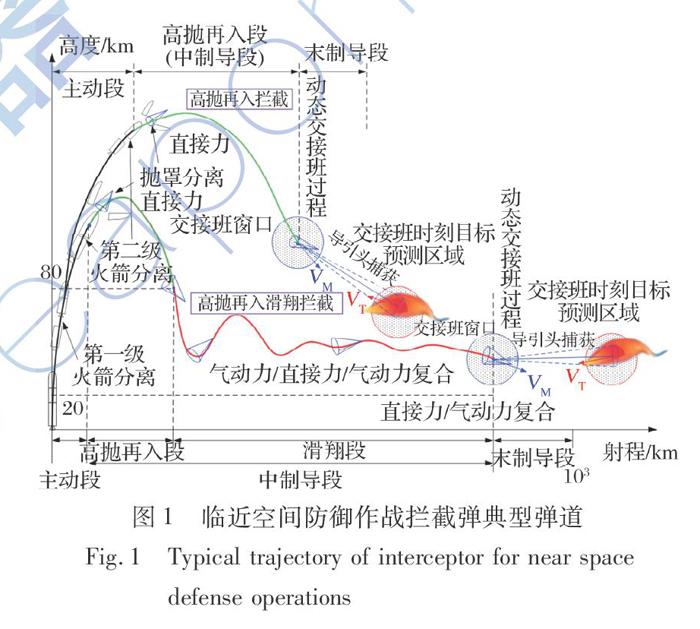
针对拦截窗口较短和修正能力不足的问题,地基拦截弹在高超声速目标拦截作战中通常选择高抛再入拦截弹道[11-12];另外,通过对拦截弹的气动外形进行优化设计[13],可以采用高抛再入滑翔弹道。两种弹道的示意如图1所示。
图中两种弹道各有优缺点,高抛再入拦截弹道交接班高度在80 km以上,通过轨控发动机进行大范围修正调整,修正效率高、响应时间快且导引头不受气动热干扰的影响,但是能够利用的气动力可以忽略不计,弹道修正能力主要受限于轨控发动机所能使用的能量。高抛再入滑翔弹道可借助拦截弹的高升阻比气动外形进行再入滑翔飞行,交接班可在滑翔段进行,拦截弹拥有与高超声速目标相当的速度和机动能力,而且可利用气动力进行弹道修正。当气动力不足时,可通过直接力/气动力复合控制产生较大的可用过载,用于修正因目标轨迹预测误差引起的交接班误差。不足之处是气动热将对导引头搜索、截获和跟踪产生影响,所以末制导需要采用侧窗探测的红外凝视导引头,以避开导弹头部热流密集区。
相比于高抛再入拦截弹道,再入滑翔弹道高度相对较低,且拦截弹飞行环境较为复杂,面临的技术难题也更多。因此,重点探讨高抛再入滑翔中制导弹道在线修正拦截技术。与临近空间高超声速飞行器一样,拦截弹抛掉助推器之后剩余的拦截弹部分也将长时间在临近空间作无动力滑翔。但临近空间空气稀薄,要产生较大的控制力,这就对拦截弹的外形和控制提出了以下要求:
(1) 具有大升阻比的外形,并且能够大攻角飞行;
(2) 具有较大的飞行速度;
(3) 装备直接力发动机装置,可以为大范围快速弹道调整提供足够的可用过载。
这些措施可保證拦截弹产生足够的控制力,以实现预先规划或在线修正的最优弹道。
1.1.2 中制导弹道在线修正
临近空间拦截弹中制导弹道在线修正主要包括三个部分:
(1) 拦截弹弹道离线优化;
(2) 基于离线优化弹道数据的拦截弹弹道在线修正算法设计;
(3) 拦截弹高精度弹道跟踪制导律设计。
通过离线弹道优化可获得基准弹道数据,这是弹道在线修正的基础。基于离线优化弹道数据的弹道在线修正算法设计是关键,高精度弹道跟踪制导律是在线修正弹道得以实现的保证。三者相辅相成,缺一不可,基于弹道在线修正的拦截作战工作原理如图2所示。
中制导弹道在线修正主要有两种思路[14-15]:一种是利用高效优化算法将当前状态与约束状态作为边值条件,对弹道进行重新优化,然而重新优化的可靠性不足、计算量大、求解效率低,难以满足实时性要求;另一种是将改变后的约束条件作为基准状态的扰动,利用线性化方法求解所需的控制补偿量,求解效率高。
邻域最优弹道修正算法通过将基准最优弹道满足的一阶最优性条件进行再次求导,得到了满足调整后的终端约束条件的控制量修正量,并且保证了原指标函数的二阶最优性[16]。文献[17-18]为应对拦截弹中制导过程中由于初始状态偏差以及目标机动引起的中制导初始条件和终端约束条件变化,基于邻域最优控制理论提出了一种邻域最优弹道修正算法。此方法充分利用基准最优弹道数据,避免了重复进行大范围寻优求解,有效节省时间,适用于临近空间拦截弹在线弹道修正。
除了邻域最优控制理论外,许多学者也采用模型预测静态规划(Model Predictive Static Programming,MPSP)实现对弹道的快速修正。MPSP是2009年Padhi基于模型预测控制和近似动态规划理论,提出的一种高效的计算技术,可以用来解决终端约束限制下的有限时间开环最优控制问题。MPSP通过引入静态拉格朗日算子将最优控制问题转换为静态优化问题[19],直接得出解析的关于终端误差的控制量偏差,不存在数值优化过程[20],从而使得MPSP算法具有较高的计算效率,具备在线应用潜力,然而采用MPSP算法,处理带有过程约束的高超声速飞行器轨迹优化是一个难点问题。文献[21]设计了高超声速无动力滑翔飞行器鲁棒次优再入制导律,并将动压、热流和过载转化为攻角约束。但由于影响攻角取值区间的因素多而且复杂,攻角很难准确求解。文献[22]利用MPSP解决了考虑前置角和侧向过载约束的最优控制问题,但制导指令的推导过程过于繁琐,且考虑的过程约束越多,该方法适用性越差。MPSP的另一个局限性是目标函数只能选择二次型能量最省,这也限制了它的应用。考虑到拦截弹在交接班时刻需要较大的速度,若采用能量最省将很难实现这一目标。为了解决末速最大的弹道优化问题,文献[23]将求解末速最大化问题转换为作用于速度反方向合力的动量最小化问题,然而该方法应用的前提为攻角无限小,此条件过于苛刻。另外控制量为弹道坐标系下横纵方向的加速度,并不能将攻角和倾侧角作为控制量。文献[24]将MPSP理论与高斯伪谱法相结合提出了伪谱模型预测静态规划方法,利用插值多项式作为基函数来近似控制变量,使得待优化的变量减少,计算更高效,但没有考虑状态和输入受限的问题。以上方法均基于气动力完成弹道修正,仅能够适应目标轨迹预测误差小范围的变化。
1.2 中末制导交接班
复合制导过程包含了初制导、中制导、末制导以及各阶段的交接班。由于临近空间防御作战中拦截弹和目标的相对速度极大,再加上轨迹预测误差难以保证,使得中末交接班成为拦截弹成功拦截目标的关键,也是制约临近空间防御作战的技术瓶颈。
为解决反临近空间高超声速目标“交班难”的问题,文献[5]创新性地给出了临近空间中末制导交接班窗口的概念,指出为保证拦截弹既能“看得到”目标,又能“打得上”目标,需要在中末制导交接班时满足以下约束。
一是保证导引头能够成功截获目标。传统的地空导弹在拦截常规空气动力学目标时,其中末制导交接班主要包括两个方面,即导引头的交接班以及弹道的交接班。导引头的交接班是指当弹目距离小于导引头探测距离时,导引头开机完成距离截获;当目标位于导引头视场范围内,且导引头接收到的反射信号足够强,导引头完成角度截获;然后经过频率搜索达到速度截获后就实现了目标截获,完成导引头交接班。弹道交接班主要考虑中制导指令到末制导指令的平滑过渡,从而确保弹道的平滑,避免拦截弹失稳[25]。为了实现这一过程,可通过修正拦截弹中制导段弹道,进而动态调整其交接班时间与交接班时刻的飞行状态,使得拦截弹导引头视场最终能够覆盖目标高概率存在区域。其原理如图3所示。
二是保证拦截弹在交接班时刻所处的位置、速度大小和方向满足末制导捕获条件约束,从而使拦截弹处于有利的末制导初始拦截态势,并尽量降低对于末制导段的需用过载。文献[5]结合零控拦截流形推导得出了纯比例导引律的捕获条件,并基于该条件进一步描述了拦截弹在交接班时刻的位置和速度指向约束。如图4所示,目标与导弹的速度取为1.5,比例系数设为4,以目标T为参考点,在目标速度VT0方向不变情况下,以点M2为例,若拦截弹在位置M2,则目标T的速度前置角为221.83°,此时为保证拦截弹在纯比例导引律的导引下成功命中目标,其速度前置角的取值范围为-133.4°~-39.87°。
目前末制导捕获区的研究主要集中在比例导引律及其改进形式的捕获状态。文献[26-28]研究了拦截分段连续机动目标的纯比例导引律和增广比例导引律的捕获状态,以及针对拦截非机动目标的真比例导引律的捕获条件;文献[29]分析了目标机动和导弹过载受限情况下
广义理想比例导引律的捕获条件;通过推导顺轨和逆轨的零控拦截条件,文献[30]对比分析了纯比例导引律和反比例导引律的捕获区。在比例类导引律捕获区研究的基础上,文献[31]推导得到了滑模变结构制导律的捕获区,如图5所示。在中末交接班时刻,若由拦截弹的速度前置角η与目标的速度前置角γ组成的坐标(γ,η)落入区域A∪B内,则能够保证拦截弹在滑模变结构末制导律的导引下成功命中目标。
为了更深入地挖掘制约中末制导交接班的约束条件,既要分析目标轨迹预测误差对导引头截获条件的影响,同时还要研究考虑拦截弹可用过载和导引头视场限制,以及目标机动影响条件下的末制导捕获条件。文献[32]以装备捷联导引头的空空导弹为研究对象,为了在拦截快速移动目标过程中能够保证导引头持续跟踪目标,研究了考虑导引头视场角约束的末制导捕获条件,为考虑侧窗探测视场约束的临近空间拦截弹中末制导交接班条件研究提供了借鉴。文献[33]针对临近空间高超声速飞行器预警探测过程中的目标交接班问题,分析了目标交接班对轨迹预测的需求,指出目标轨迹预测误差越小越容易完成交接班。较大的轨迹预测误差可能使拦截弹的需用过载超过可用过载[34-35],从而导致拦截失败,甚至使得探测信息无法转换为决策信息而造成防御系统的瘫痪。
1.3 末制导关键技术
在临近空间防御作戰中,高超声速飞行器将以极高的飞行速度对我方重要目标实施打击。受限于导引头的探测距离,拦截弹的末制导距离较短,留给拦截弹的末制导时间十分有限,一般在10 s左右。要想在如此短的时间内实现对目标的直接碰撞杀伤,高精度的现代制导律是一个重要的研究方向。另一方面,考虑到拦截弹自身复杂的特点以及面临的严苛拦截环境,为提高拦截弹的命中概率,一类带约束的高性能末制导律也是目前研究的重点。
1.3.1 高精度现代制导律
直接碰撞是拦截临近空间高超声速目标最有效的杀伤方式。为了在极为有限的末制导时间内实现对目标的直接碰撞杀伤,许多学者从提高制导精度的角度出发进行了一些研究。针对反临拦截背景,基于有限时间收敛理论和PWPF调节器,文献[36]设计了一种有限时间收敛制导律,提高了反临拦截弹的制导精度且减少了其燃料的消耗。考虑到高超声速飞行器大幅度跳跃机动的弹道特点,文献[37]构造了可以随弹目距离以及目标跳跃幅值进行自适应调整的滑模趋近律,进而设计了一种新的反临拦截弹末端滑模制导律。以X-51A为典型目标,通过将Hamilton函数与最优控制理论相结合,文献[38]提出了一种非线性H∞制导律,增强了制导系统的鲁棒性。为了保证滑模制导律的近最优性同时抑制抖振,文献[39]基于有限时间最优反馈控制理论,设计了反临拦截弹有限时间近最优积分滑模末制导律,获得了较高的制导精度。以美国THAAD动能拦截弹为基本模型,通过构造目标机动加速度上限估计器,文献[40]设计了一种新的滑模变结构制导律,给出一种抖振问题的解决方案。
随着近年来人工智能领域相关技术的飞速发展,将计算机智能技术与制导律设计相结合的做法,正受到许多学者的高度关注。基于强化学习原理,通过模拟大脑对环境的反馈学习,自适应动态规划方法得到了长足发展。文献[41-42]分析和总结了将其应用于拦截弹末制导的现状和前景。文献[43]借助于模糊RBF网络的高效自学习能力,有效解决了滑模制导律的抖振问题,仿真结果表明其对大机动目标具有较好的适应性。
1.3.2 带约束的末制导律
针对反临拦截弹严苛的拦截过程约束,如发动机的动态延迟约束、可用过载约束、终端视线角约束、侧窗探测约束等,设计考虑约束的末制导律更具实际意义,部分学者已开展相关工作并取得了一定的成果。
考虑拦截器发动机的动态延迟特性,基于零化视线角速率原理和有限时间积分反步法,文献[44]和文献[45]分别设计了一种自适应变结构制导律和有限时间收敛制导律,有效补偿了拦截弹自动驾驶仪的延迟,获得了较高的制导精度。针对拦截弹发动机控制约束和末制导时间约束问题,文献[46]设计了带滞环开关的bang-bang制导律,有效避免了视线角速率的抖振,降低了发动机的开关频率。考虑拦截弹可用过载的约束,文献[39]基于有限时间最优反馈控制理论设计了一种滑模制导律,有效解决了可用过载饱和问题且保证了较高的制导精度。由于反临拦截弹多采用侧窗探测,在该探测模式下,需要满足拦截弹姿态定向约束,文献[47]针对该类约束提出了一种轨控有限时间收敛制导律,保证了探测视场的稳定。
1.4 直接力/气动力复合控制
目前对反临拦截弹控制技术的研究还相对较少。由于在临近空间防御作战中,若采用高抛再入弹道,则需使拦截弹的中制导段处于较高的空域。由于大气密度很小,拦截弹气动能力较弱,要想实现拦截弹的姿态或轨迹调整需要借助直接力控制。因此,现有大多数文献聚焦于对反临拦截弹的直接力控制或直接力/气动力复合控制开展研究。
许多学者青睐于将观测器应用于反临拦截弹姿态控制律的设计中,并取得了一定的研究成果。针对反临拦截弹的直接力/气动力复合控制问题,文献[48]基于干扰观测器设计了一种高精度的复合跟踪控制器,仿真表明其具有一定的干扰抑制和补偿能力。针对一类带姿控发动机的侧窗探测拦截弹,文献[49]结合滑模控制理论和伪速率脉冲调制器设计了一种高精度的姿态控制律。考虑反临拦截弹在大干扰、强耦合情况下的姿态控制问题,文献[50]基于一种新型非线性干扰观测器和PSR调制器,实现了对拦截弹快速准确的姿态控制,且该方法对外界不确定性和干扰具有强鲁棒性。为解决直接力/气动力复合体制的反临拦截弹的抗干扰控制问题,文献[51]基于有限时间干扰观测器提出了一种非奇异终端滑模控制律,实现了理想的控制分配精度,且控制能耗较小。而文献[52]则基于干扰观测器设计了一种反临拦截弹保性能跟踪控制器。
另外,部分学者在设计拦截弹控制方法时考虑了各种约束条件,进一步提升了所设计控制律的工程实用价值。针对拦截弹质心漂移问题和控制输入受限问题,文献[46]设计了两种鲁棒姿态控制律。考虑拦截弹侧窗探测约束和制导约束问题,文献[40]基于时标分离原理设计了一种拦截弹动态逆控制律。同样针对拦截弹的侧窗探测约束问题,文献[53]和文献[54]分别利用自适应和最优控制理论提出了两种拦截弹姿态控制律。
1.5 多攔截弹协同拦截
针对具有高速高机动特性的临近空间高超声速飞行器,拦截弹在速度和机动性能上不占优势,仅靠单枚拦截弹难以实现对该类目标的有效拦截,因此,多拦截弹协同拦截是未来临近空间防御作战中的一种重要思路。基于协同拦截的策略,许多学者已经进行了相关探索。结合实时在线的遗传算法寻优与滑模变结构控制理论,文献[55]设计了4-D协同制导律,以多对多饱和拦截策略实现了反临作战中对目标的有效拦截。基于协同覆盖理论,并将多拦截弹对目标高概率存在区域的覆盖程度作为优化指标,文献[56]实现了协同弹道的生成与修正,取得了较好的效果。文献[57]同样将协同拦截问题转化为区域覆盖问题,提出了分时协同和同时协同拦截方法,实现了对目标的有效拦截。
结合现有的研究情况,目前主要有两类协同拦截策略。一类具有严格时间一致性约束,这类策略一方面可以要求多拦截弹导引头在同一时间不同空间位置通过导引头指向协同实现对目标搜索空域的覆盖,另一方面通过控制多枚拦截弹交接班时刻的空间位置,实现多拦截弹攻击区对目标预测命中区域的覆盖。但是,如何实现交接班时间一致约束和多拦截弹空间的相对分布等问题需要深入研究。基于时间一致约束的齐次拦截策略如图6所示。
另一类是时间和空间具有梯次性的协同策略,在一定的时间间隔范围内不断对目标预测管道内指定区域进行梯次覆盖,使多拦截弹在空间和时间上形成梯次,保证中末制导交接班时导引头截获目标。该策略使得多枚拦截弹在不同时刻对目标探测拦截,因此后续拦截弹可采用误差较小的拦截弹导引头量测信息代替误差相对较大的预警信息。该拦截策略如图7所示。
两种拦截策略各有优缺点:齐次拦截可以扩大导引头覆盖范围,形成对高超声速目标的围攻之势,提高导引头探测能力和成功截获目标的概率;缺点是拦截窗口狭小,具有强时间约束的特性,多枚拦截弹在射程有限情况下很难寻找一个共同的时间窗口。梯次拦截相对简单,易于工程实现。通过设计合理的时间间隔,缩小后续拦截弹所要覆盖的目标概率存在区域,同样可以扩大拦截窗口。通过导引头信息共享,可为后续发射的拦截弹提供更为精确的目标信息,提高交接班成功概率以及杀伤概率。不足之处是当目标进行机动飞行时,很容易逃脱单枚拦截弹的攻击。
2 反临拦截弹关键技术展望
虽然现有对反临拦截弹制导与控制技术的研究已经取得了一定的成果,但仍然存在需要进一步深入研究的空间,这里对未来需要重点发展的几个方向进行展望。
2.1 基于区域分割的多拦截弹协同弹道生成
区别于现有大多数文献中集中式的多弹道优化方式,未来可充分考虑多枚拦截弹之间可能进行的信息交互,将多拦截弹系统当作一个整体,建立与目标间的攻防模型,进而探索高效可靠的多拦截弹协同弹道生成方法。
如图8所示,在攻防对抗中,多枚拦截弹通过与相邻拦截弹之间的信息交互(共享彼此的状态信息)耦合成一个整体,每枚拦截弹根据获得的目标信息、自身的状态信息以及相邻拦截弹的状态信息不断调整自己弹道,进而与其余拦截弹共同形成优化的中制导协同弹道。在拦截过程中,首先需要结合每枚拦截弹的动力学特点以及弹间信息交互特点建立多拦截弹系统的耦合模型,在此基础上,面向多拦截弹系统设计协同优化弹道。
在上述考虑弹间信息交互的多拦截弹系统模型下,为提高多枚拦截弹对目标高概率存在区域的协同覆盖效果,可按照一定的规则实时地将目标高概率存在区域进行合理分割,在此基础上对每个子区域的覆盖性能单独优化。以三枚拦截弹为例,可将拦截弹距离预测目标点的距离最小作为分割指标,为每枚拦截弹实时划分各自的覆盖区域,如图9所示。
根据拦截器导引头性能指标、中末交接班时刻目标高概率存在区域截面,以及相应的覆盖任务区域分割规则,计算为保证覆盖目标高概率存在区域截面需用的最小拦截弹个数,依据协同覆盖算法为多拦截弹选择中末制导交接班时刻状态约束,其中建立多拦截弹编队状态优化问题的数学模型是求解该问题的关键。拦截弹导引头协同覆盖目标高概率存在区域示意图如图10所示。
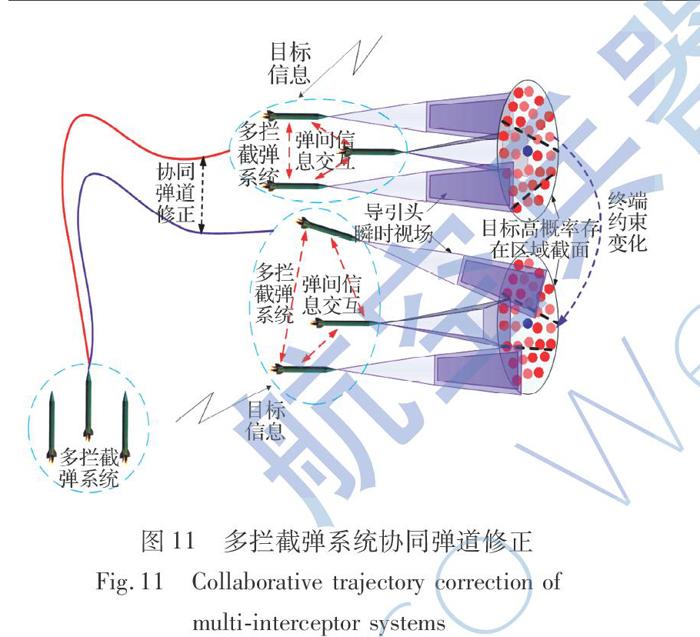
2.2 基于分布式优化的多拦截弹协同弹道修正
在拦截弹的中制导飞行过程中,由于目标测量信息的更新以及对目标高概率存在区域描述精度的提高,需要对拦截弹中末制导交接班时的位置以及拦截弹姿态约束进行调整,以满足更新后的协同覆盖需求。在单枚拦截弹拦截过程中,若终端约束发生变化,可利用弹道在线修正优化处理。但在多拦截弹协同拦截的过程中,情况有所不同,解决该变终端约束下协同弹道修正问题,关键技术主要有三个方面:一是覆盖任务区域分割的在线修正方法;二是面向变终端约束的多拦截弹系统协同弹道滚动时域优化技术;三是考虑弹间信息交互的多拦截弹分布式优化技术。多拦截弹协同拦截弹道修正过程示意图如图11所示。
2.3 多拦截弹协同末制导律的动态捕获区
捕获区作为末制导律能够成功拦截目标的所有初始状态集合,对于拦截高超声速目标的中末制导交接班条件设计至关重要。然而目前的研究并未考虑目标机动以及多拦截弹协同制导下的捕获区,需要进一步开展以下两方面的研究。
(1) 考虑强机动目标的高动态特性的末制导动态捕获状态空间
在实际的拦截情形中,目标可能会采取不同的机动形式来规避拦截弹的攻击。针对机动目标拦截问题,拦截弹的位置约束及速度指向约束相较于非机动目标拦截情形更加严格,通过分析目标的机动模式和作战意图,以概率的形式描述目标在拦截弹交接班时刻的空间可达区域,在此基础上考察拦截弹与目标的初始相对关系对拦截效果的影响,进而结合末制导律形式与目标可达区域的概率分布,确定导引律的动态捕获状态空间。在中末制导交接班时刻,为保证在目标机动前提下拦截弹仍能够实现对目标的有效拦截,必须使得拦截弹与目标的速度前置角相对关系位于动态捕获区内。
(2) 考虑多拦截弹协同末制导下的捕获区
现有的捕获区定义仅适用于单枚拦截弹的情形,具有相应的约束条件。为了在多拦截弹协同拦截目标的过程中更好运用捕获区条件,需要以现有的捕获区研究为基础进行扩展和推广,从而使其成功适用于协同制导律。
3 结 束 语
在临近空间防御作战中,防御方面临着发现难、探测难、跟踪难、拦截难的“四难”问题,一方面給预警探测系统带来了巨大挑战,另一方面也给反临拦截弹的制导控制系统提出了更高要求。本文聚焦反临拦截弹的制导与控制关键技术,从“中制导”、“中末制导交接班”、“末制导”、“直接力/气动力复合控制”以及“多拦截弹协同拦截”五个方面进行相关研究进展的梳理总结,并结合现有研究围绕“基于区域分割的多拦截弹协同弹道生成”、“基于分布式优化的多拦截弹协同弹道修正”以及“多拦截弹协同末制导律的动态捕获区”进行了展望。随着新的作战场景与应用需求的出现以及工程技术的不断突破,拦截弹制导与控制技术将会面临新的挑战,因此,本文所讨论的问题比较有限,期望能够抛砖引玉,为后续本领域的研究提供参考和借鉴。
参考文献:
[1] 吴颖川,贺元元,贺伟,等. 吸气式高超声速飞行器机体推进一体化技术研究进展[J]. 航空学报,2015,36(1): 245-260.
Wu Yingchuan,He Yuanyuan,He Wei,et al. Progress in Airframe Propulsion Integration Technology of Air-Breathing Hypersonic Vehicle[J]. Acta Aeronautica et Astronautica Sinica,2015,36(1): 245-260. (in Chinese)
[2] 方洋旺,柴栋,毛东辉,等. 吸气式高超声速飞行器制导与控制研究现状及发展趋势[J]. 航空学报,2014,35(7): 1776-1786.
Fang Yangwang,Chai Dong,Mao Donghui,et al. Status and Development Trend of the Guidance and Control for Air-Breathing Hypersonic Vehicle[J]. Acta Aeronautica et Astronautica Sinica,2014,35(7): 1776-1786. (in Chinese)
[3] 王鹏飞,王洁,时建明,等. 吸气式高超声速飞行器控制研究综述[J]. 航空兵器,2015(3): 3-7.
Wang Pengfei,Wang Jie,Shi Jianming,et al. Research Progress on Control System of Air-Breathing Hypersonic Flight Vehicles[J]. Aero Weaponry,2015(3): 3-7. (in Chinese)
[4] 吴立刚,安昊,刘健行,等. 吸气式高超声速飞行器控制的最新研究进展[J]. 哈尔滨工业大学学报,2016,48(10): 1-16.
Wu Ligang,An Hao,Liu Jianxing,et al. Recent Progress in Control of Air-Breathing Hypersonic Vehicles[J]. Journal of Harbin Institute of Technology,2016,48(10): 1-16. (in Chinese)
[5] 王华吉,雷虎民,张大元,等.反临近空间高超声速目标拦截弹中末制导交接班窗口[J].国防科技大学学报,2018,40(5): 1-8.
Wang Huaji,Lei Humin,Zhang Dayuan,et al. Research on Midcourse and Terminal Guidance Handover Window for Interceptor Against Near Space Hypersonic Target[J]. Journal of National University of Defense Technology,2018,40(5): 1-8. (in Chinese)
[6] 谢愈,刘鲁华,汤国建,等. 高超声速滑翔飞行器摆动式机动突防弹道设计[J]. 航空学报,2011,32(12): 2174-2181.
Xie Yu ,Liu Luhua ,Tang Guojian ,et al. Weaving Maneuver Trajectory Design for Hypersonic Glide Vehicles[J]. Acta Aeronautica et Astronautica Sinica,2011,32(12): 2174-2181. (in Chinese)
[7] 龚旻,谭杰,李大伟,等. 临近空间高超声速飞行器黑障问题研究综述[J]. 宇航学报,2018,39(10): 1059-1070.
Gong Min,Tan Jie,Li Dawei,et al. Review of Blackout Problems of Near Space Hypersonic Vehicles[J]. Journal of Astronautics,2018,39(10): 1059-1070. (in Chinese).
[8] 秦雷. 临近空间领域面临的重大控制科学问题研究[J]. 战术导弹技术,2017(1): 85-92.
Qin Lei. Research on Important Control Scientific Problems of Near Space Hypersonic Vehicles[J]. Tactical Missile Technology,2017(1): 85-92. (in Chinese).
[9] 李君龍,李阳,刘成红,等. 临近空间防御高精度制导控制面临的技术挑战[J]. 战术导弹技术,2016(3): 7-11.
Li Junlong,Li Yang,Liu Chenghong,et al. Problem and Challenge on the High-Precision Guidance and Control Denfensing in the Near Space[J]. Tactical Missile Technology,2016(3): 7-11. (in Chinese).
[10] 徐品高. 地空导弹与弹道导弹的技术融合正在促使这两类导弹产生突破性的发展[J]. 现代防御技术,2000,28(3): 1-12.
Xu Pingao. Technology Fusion of Surface to Air Missile and Ballistic Missile is Spurring to Form Development in Giant Stride for Two Types Missiles [J]. Modern Defence Technology,2000,28(3): 1-12. ( in Chinese)
[11] 黄梓宸,张雅声,刘瑶. 高超声速滑翔弹头防御策略分析与仿真研究[J]. 现代防御技术,2018,46(3): 18-28.
Huang Zichen,Zhang Yasheng,Liu Yao. Analysis and Simulation for Defending Hypersonic Glide Warhead[J]. Modern Defence Technology,2018,46(3): 18-28. (in Chinese)
[12] 赵杰,王君,张大元,等. 反临近空间高超声速飞行器中末交接视角研究[J]. 飞行力学,2015,33(3): 253-256.
Zhao Jie,Wang Jun,Zhang Dayuan,et al. Visual Angle Research for Midcourse and Terminal Guidance Hand-over of Near Space Hypersonic Vehicles[J]. Flight Dynamics,2015,33(3): 253-256. (in Chinese)
[13] 张珍铭,刘毅,丁运亮. 高超声速飞行器参数化几何建模方法与外形优化[J]. 南京航空航天大学学报,2012,44(2): 172-177.
Zhang Zhenming,Liu Yi,Ding Yunliang. Parametric Geometry Modeling and Shape Optimization Method for Hypersonic Flight Vehicles[J]. Journal of Nanjing University of Aeronautics & Astronautics,2012,44(2): 172-177. (in Chinese)
[14] Pontani M,Cecchetti G,Teofilatto P. Variable-Time-Domain Neighboring Optimal Guidance Applied to Space Trajectories[J]. Acta Astronautica,2015,115: 102-120.
[15] 雷虎民,周觐,翟岱亮,等. 基于二阶变分的中制导最优弹道修正[J]. 系统工程与电子技术,2016,38(12): 2807-2813.
Lei Humin,Zhou Jin,Zhai Dailiang. et al. Midcourse Guidance Optimal Trajectory Modification Using the Second Variation [J]. Systems Engineering and Electronics,2016,38(12): 2807-2813. (in Chinese)
[16] Bryson A E,Jr,Ho Y C. Applied Optimal Control[M]. New York: Blaisdell Publishing Company,1975: 177-211.
[17] Zhou J,Lei H M,Zhang D Y. Online Optimal Midcourse Trajectory Modification Algorithm for Hypersonic Vehicle Interceptions[J]. Aerospace Science and Technology,2017,63: 266-277.
[18] Lei H M,Zhou J,Zhai D L,et al. Optimal Midcourse Trajectory Cluster Generation and Trajectory Modification for Hypersonic Interceptions[J]. Journal of Systems Engineering and Electronics,2017,28(6): 1162-1173.
[19] Chawla C,Sarmah P,Padhi R. Suboptimal Reentry Guidance of a Reusable Launch Vehicle Using Pitch Plane Maneuver[J]. Aerospace Science and Technology,2010,14(6): 377-386.
[20] 王萌萌,张曙光. 基于模型预测静态规划的自适应轨迹跟踪算法[J]. 航空学报,2018,39(9): 194-202.
Wang Mengmeng,Zhang Shuguang. Adaptive Trajectory Tracking Algorithm Based on Tracking Model-Predictive-Static-Programming[J]. Acta Aeronautica et Astronautica Sinica,2018,39(9): 194-202. (in Chinese)
[21] Halbe O,Raja R G,Padhi R. Robust Reentry Guidance of a Reusable Launch Vehicle Using Model Predictive Static Programming[J]. Journal of Guidance,Control,and Dynamics,2013,37(1): 134-148.
[22] Mondal S,Padhi R. State and Input Constrained Missile Guidance Using Spectral Model Predictive Static Programming[C]∥ AIAA Guidance,Navigation,and Control Conference,2018.
[23] Kumar P,Bhattacharya A,Padhi R. Minimum Drag Optimal Guidance with Final Flight Path Angle Constraint Against Reentry Targets[C] ∥ AIAA Guidance,Navigation,and Control Conference,2018.
[24] Mondal S,Padhi R. Angle-Constrained Terminal Guidance Using Quasi-Spectral Model Predictive Static Programming[J]. Journal of Guidance,Control,and Dynamics,2017,41(3): 783-791.
[25] 張大元,雷虎民,李海宁,等. 复合制导导引头开机截获概率估算[J]. 固体火箭技术,2014,37(2): 150-155.
Zhang Dayuan,Lei Humin,Li Haining,et al. Estimate of Startup Target Acquisition Probability of Seeker for Missiles with Composite Guidance[J]. Journal of Solid Rocket Technology,2014,37(2): 150-155. (in Chinese)
[26] Ghosh S,Ghose D. Raha S. Capturability of Augmented Pure Proportional Navigation Guidance Against Time-Varying Target Maneuvers[J]. Journal of Guidance,Control,and Dynamics,2014,37(5): 1446-1461.
[27] Dhar A,Ghose D. Capture Region for a Realistic TPN Guidance Law[J]. IEEE Transactions on Aerospace and Electronic Systems,1993,29(3): 995-1003.
[28] Ghawghawe S N,Ghose D. Pure Proportional Navigation Against Time-Varying Target Manoeuvers [J]. IEEE Transactions on Aerospace and Electronic Systems,1996,32(4): 1336-1347.
[29] Tyan F. Analysis of General Ideal Proportional Navigation Guidance Laws[J]. Asian Journal of Control,2016,18(3): 899-919.
[30] 周觐,雷虎民,侯峰,等. 拦截高速目标的比例与反比例导引捕获区分析[J]. 宇航学报,2018,39(9): 1003-1012.
Zhou Jin,Lei Humin,Hou Feng,et al. Capture Region Analysis of Proportional Navigation and Retro-Proportional Navigation Guidance for Hypersonic Target Interception[J]. Journal of Astronautics,2018,39(9): 1003-1012. (in Chinese)
[31] 李万礼,李炯,雷虎民,等. 基于滑模变结构制导律的捕获区分析[J]. 系统工程与电子技术,2021. http: ∥kns.cnki.net/kcms/detail/11.2422.TN.20210316.1833.004.html.
Li Wanli,Li Jiong,Lei Humin,et al. Analysis of Capture Region Based on Sliding Mode Variable Structure Guidance Law[J]. Systems Engineering and Electronics,2021. http: ∥kns.cnki.net/kcms/detail/11.2422.TN.20210316.1833.004.html. (in Chinese)
[32] Lee S,Ann S,Cho N,et al. Capturability of Guidance Laws for Interception of Nonmaneuvering Target with Field-of-View Limit[J]. Journal of Guidance,Control,and Dynamics,2018,42(4): 869-884.
[33] 韩春耀,熊家军,张凯. 预警探测系统目标交接班需求分析[J].装甲兵工程学院学报,2018,32(1): 90-95.
Han Chunyao,Xiong Jiajun,Zhang Kai. Requirements Analysis on Mission Shifting of Early Warning and Detection System[J] Journal of Academy of Armored Force Engineering,2018,32(1): 90-95. (in Chinese)
[34] 李庚泽,魏喜庆,王社阳. 基于轨迹预测的高超声速飞行器拦截中/末制导研究[J]. 上海航天,2017,34(6): 7-12.
Li Gengze,Wei Xiqing,Wang Sheyang. Study on Trajectory Predicting and Midcourse/Terminal Guidance Against Hypersonic Vehicle[J]. Aerospace Shanghai,2017,34(6): 7-12. (in Chinese)
[35] 孟凡坤,吴楠,牛朝阳. 机动弹道对抗导弹防御系统的效能分析[J]. 飞行器测控学报,2014,33(5): 399-405.
Meng Fankun,Wu Nan,Niu Zhaoyang. Effectiveness of Maneuvering Trajectory Against Missile Defense Systems[J]. Journal of Spacecraft TT & C Technology,2014,33(5): 399-405. (in Chinese)
[36] 段美君,周荻,程大林. 基于有限時间理论的临近空间拦截器末制导律PWPF调节器研究[J]. 航空学报,2018,39(1): 273-282.
Duan Meijun,Zhou Di,Cheng Dalin. Development of Terminal Guidance Law and PWPF Modulator for Near Space Interceptor Based on Finite Time Theory[J]. Acta Aeronautica et Astronautica Sinica,2018,39(1): 273-282. (in Chinese)
[37] 惠耀洛. 反临近空间飞行器的导弹制导律设计与仿真研究[D]. 南京: 南京航空航天大学,2016.
Hui Yaoluo. Research on Design and Simulation of Guidance Law for Anti Near-Space Vehicle Missile[D]. Nanjing: Nanjing University of Aeronautics and Astronautics,2016. (in Chinese)
[38] 凡国龙,梁晓庚. 临近空间拦截弹 H∞末制导律设计研究[J]. 航空兵器,2014(4): 8-11.
Fan Guolong,Liang Xiaogeng. Design of H∞ Terminal Guidance Law for Near Space Interceptor[J]. Aero Weaponry,2014(4): 8-11. (in Chinese)
[39] 孟克子. 拦截高速机动目标的导弹导引规律研究[D]. 哈尔滨:哈尔滨工业大学,2017.
Meng Kezi. Missile Guidance Laws for Intercepting High-Speed Maneuvering Targets[D]. Harbin: Harbin Institute of Technology,2017. (in Chinese)
[40] 杨源. 临近空间拦截器末制导及控制问题研究[D]. 哈尔滨: 哈尔滨工业大学,2018.
Yang Yuan. Research on Terminal Guidance and Control for Near-Space Interceptor[D]. Harbin: Harbin Institute of Technology,2018. (in Chinese)
[41] 孙景亮,刘春生. 基于自适应动态规划的导弹制导律研究综述[J]. 自动化学报,2017,43(7): 1101-1113.
Sun Jingliang,Liu Chunsheng. An Overview on the Adaptive Dynamic Programming Based Missile Guidance Law[J]. Acta Automatica Sinica,2017,43(7): 1101-1113. (in Chinese)
[42] Jiang Z P,Jiang Y. Robust Adaptive Dynamic Programming for Linear and Nonlinear Systems: An Overview[J]. European Journal of Control,2013,19(5): 417-425.
[43] 周德云,杨振,张堃. 基于模糊RBF網络的自适应变结构制导律设计[J]. 飞行力学,2016,34 (4): 54-58.
Zhou Deyun,Yang Zhen,Zhang Kun. Design of Adaptive Variable Structure Guidance Law Based on Fuzzy RBFNN[J]. Flight Dynamics,2016,34 (4): 54-58. (in Chinese)
[44] 佘文学,周军,周凤岐. 一种考虑自动驾驶仪动态特性的自适应变结构制导律[J]. 宇航学报,2003,24(3): 245-249.
She Wenxue,Zhou Jun,Zhou Fengqi. An Adaptive Variable Structure Guidance Law Considering Missiles Dynamics of Autopilot[J]. Journal of Astronautics,2003,24(3): 245-249. (in Chinese)
[45] Golestani M,Mohammadzaman I,Vali A R. Finite-Time Convergent Guidance Law Based on Integral Backstepping Control[J]. Aerospace Science and Technology,2014,39: 370-376.
[46] 段美君. 临近空间拦截器开关制导控制方法研究[D]. 哈尔滨: 哈尔滨工业大学,2019.
Duan Meijun. Research on Guidance and Control Law with on-off Control Input for Near Space Interceptor [D]. Harbin: Harbin Institute of Technology,2019. (in Chinese)
[47] 李炯,张涛,王华吉,等. 侧窗探测动能拦截器轨控有限时间收敛制导律[J]. 控制与决策,2019,34(5): 973-980.
Li Jiong,Zhang Tao,Wang Huaji,et al. Finite-time Convergence Guidance Law of Side Windows Detection Kinetic Kill Vehicle with Orbit Control in Terminal[J]. Control and Decision,2019,34(5): 973-980. (in Chinese)
[48] 郭超,梁晓庚,王俊伟,等. 基于干扰观测器的临近空间拦截弹复合控制[J]. 计算机仿真,2014,31(3): 92-95.
Guo Chao,Liang Xiaogeng,Wang Junwei,et al. Blended Control of Near Space Interceptor Based on Disturbance Observer[J]. Computer Simulation,2014,31(3): 92-95.(in Chinese)
[49] 张涛,李为民,李炯,等. 临近空间侧窗探测拦截器滑模姿态控制律设计[C]∥第二十届中国系统仿真技术及其应用学术年会,2019.
Zhang Tao,Li Weimin,Li Jiong,et al. Attitude Control Law Design of Near Space Interceptor Based on Sliding Mode Control[C]∥20th CCSSTA,2019. (in Chinese)
[50] 张朋飞,李炯,苏放,等. 基于非线性干扰观测器的临近空间拦截弹姿态控制[J]. 固体火箭技术,2019,42(2): 261-268.
Zhang Pengfei,Li Jiong,Su Fang,et al. Attitude Control of Near Space Interceptor Based on Nonlinear Disturbance Observer[J]. Journal of Solid Rocket Technology,2019,42(2): 261-268. (in Chinese)
[51] 郭超,梁晓庚,王俊伟,等. 临近空间拦截弹的非奇异终端滑模控制[J]. 宇航学报,2015,36(1): 58-67.
Guo Chao,Liang Xiaogeng,Wang Junwei,et al. Nonsingular Terminal Slide Mode Control for Near Space Interceptor[J]. Journal of Astronautics,2015,36(1): 58-67. (in Chinese)
[52] 郭超,梁晓庚,王俊伟,等. 临近空间拦截弹直接力/气动力复合控制[J]. 飞行力学,2014,32(3): 243-244.
Guo Chao,Liang Xiaogeng,Wang Junwei,et al. Blended Control of Near Space Interceptor by Using Reaction-Jet and Aerodynamics[J]. Flight Dynamics,2014,32(3): 243-244. (in Chinese)
[53] 余英,侯明善,张斯哲,等. 侧窗探测自适应制导研究[J]. 西北工业大学学报,2016,34(2): 287-293.
Yu Ying,Hou Mingshan,Zhang Sizhe,et al. A New Adaptive Proportional Navigation Based on Side Window Detection[J]. Journal of Northwestern Polytechnical University,2016,34(2): 287-293. (in Chinese)
[54] Zhu B,Quan Q,Cai K Y. Desired Attitude Angles Design Based on Optimization for Side Window Detection of Kinetic Interceptor[C]∥27th Chinese Control Conference,2008.
[55] 惠耀洛,南英,陳哨东,等. 对临近空间飞行器的多弹协同拦截策略研究[J]. 弹箭与制导学报,2015,35(5): 149-154.
Hui Yaoluo,Nan Ying,Chen Shaodong,et al. Research on Cooperative Multiple-Missile Intercepting Strategy for Near-Space Vehicles[J]. Journal of Projectiles,Rockets,Missiles and Guidance,2015,35(5): 149-154. (in Chinese)
[56] Zhou J,Lei H M. Coverage-Based Cooperative Target Acquisition for Hypersonic Interceptions[J]. Science China Technological Sciences,2018,61(10): 1575-1587.
[57] 王龙. 基于区域覆盖的多飞行器协同拦截优化设计方法研究[D]. 哈尔滨: 哈尔滨工业大学,2018.
Wang Long. Study on Optimization and Design Approach for Mutiple Flight Vehicles Cooperative Interception Based on Area Coverage[D]. Harbin: Harbin Institute of Technology,2018. (in Chinese)
Summary of Key Technologies of Interceptor Guidance and
Control in Near Space Defense Operations
Lei Humin1,Luo Changxin2*,Zhou Chijun1,Wang Huaji3,Shao Lei1
(1. Air and Missile Defense College,Air Force Engineering University,Xian 710051,China;
2. College of Graduate,Air Force Engineering University,Xian 710051,China;
3. Unit 94011 of PLA,Kashgar 844000,China)
Abstract: In order to meet the needs of near space defense combat,focusing on key technologies of guidance and control for intercepting near space vehicle,this paper reviews the current research progress from the five aspects of “midcourse guidance”,“mid-terminal guidance handover”,“terminal guidance”,“blended control by using reaction-jet and aerodynamics” and “multi-interceptor coordinated interception”,and it looks forward to several directions that may require key development in the future,including “cooperative trajectory generation technology for multiple interceptor based on region segmentation”,“cooperative trajectory correction of multiple interceptors based on distributed optimization” and “research on dynamic capture region of the coordinated terminal guidance law of multi interceptors”.This paper can provide some reference for the research on the guidance and control technology of near space interceptor.
Key words: near space defense operations;blended control by using reaction-jet and aerodynamics;cooperative interception;trajectory online correction;mid-terminal guidance handover
收稿日期:2021-05-13
基金项目:国家自然科学基金项目(61873278;61773398;61573374)
作者简介:雷虎民(1960-),男,陕西合阳人,教授,研究方向是空天拦截器制导、控制与仿真。
通讯作者:骆长鑫(1994-),男,山东淄博人,博士研究生,研究方向是空天拦截器制导、控制与仿真。
