擦窗机三吊点伸展机构及自约束系统研究
2021-08-03牛雅静李育平杨国栋
牛雅静,何 明,李育平,杨国栋
(1.廊坊凯博建设机械科技有限公司,河北 廊坊 065001;2.中际联合(北京)科技股份有限公司,北京 110112;3.中国建筑科学研究院有限公司 建筑机械化研究分院,河北 廊坊 065000)
1 概述
国内擦窗机行业经过多年的发展,技术水平逐步提高,解决建筑外墙维护系统的技术开发也趋于完善。过去的建筑挑檐结构工况下的擦窗机工作一般使用折叠式的吊船伸展机构,在建筑结构需求越来越多样化的市场环境下,国内逐步开发了伸缩式吊船伸展机构。在原擦窗机卷扬机构的设计条件下,将伸展机构的吊点沿伸展方向前后布置两点,并将辅助吊装装置设置在伸展机构前端,解决擦窗机吊船与辅助提升机构同步升降的技术难题。在实际应用中,发现还存在防风安全隐患,在折叠式伸展机构中,吊点为左右分布,在伸缩式伸展机构中吊点为前后分布,都存在另一个方向上风载下的伸展机构偏摆稳定问题。
在解决伸展机构两个方向的偏摆问题上,国内擦窗机厂家逐步开发出三吊点和四吊点的吊船伸展机构。同时,为解决在风载下吊船的稳定问题,引入吊船软绳自约束系统。
2 现有伸展机构不足分析
1)折叠式伸展机构 如图1 所示,折叠式的伸展机构结构简单,其伸展和折叠通过液压油缸伸缩完成,最大的伸展幅度能达到3.5m。缺点是辅助吊钩无法进入建筑物挑檐下方进行物料垂直运输工作,防风约束受限制。从简图上可以看出,防风销一端套在擦窗机卷扬机构起升钢丝绳上,另一端固定在建筑物幕墙防风销座上。操作人员在吊船中进行防风销固定作业时,经常会出现够不着防风销约束绳端的情况,或者因为距离太远造成防风销缠结而插错防风销导致吊船升降卡阻。

图1 折叠式伸展机构
2)两吊点伸缩式伸展机构 如图2 所示,相对于折叠式伸展机构的优点是停机状态的高度不会有太大变化,而且可以省去物料辅助起升结构,并将其悬挂点错设置在伸缩式伸展机构最前端,使用时手动拉出即可,在端部设置手拉葫芦或其他吊装工具即可完成操作。其缺点是存在和折叠式伸展机构相同的防风约束问题,且这种结构在悬挂钢丝绳的应力释放或风载作用下会产生机构自转、偏摆和偏移。

图2 折叠式伸展机构
3 三吊点伸展机构研发
3.1 四吊点伸展机构的考虑
按照国内异形施工吊篮的技术思路,当采用多吊点的施工吊篮时,一般是使用四吊点,以保证其防倾覆稳定性能,目前市场上也有厂家在擦窗机设备上使用四吊点的伸展机构。
综合BSEN1808-2015“Safety requirements for suspended access equipment -Design calculations,stability criteria,construction -Examinations and tests”以及GB 19154-2017《擦窗机》中对于钢丝绳安全系数的要求,单作用钢丝绳悬挂系统大于或等于8,双作用钢丝绳悬挂系统大于或等于12。如果使用四吊点,卷扬机构可设计为4 根钢丝绳,且每根钢丝绳安全系数大于8;按擦窗机的一般要求每个吊点要使用两根钢丝绳,则需要配置4 个吊点的共8 根钢丝绳的卷扬机构,在卷扬机构钢丝绳同步技术以及卷扬机构本身的技术问题上都存在较大难度,且经济性太低,故障点增多。
3.2 三吊点伸展机构的研发
根据标准要求,结合实际应用的状况,发现三吊点的伸展机构在操作性能和稳定性上有其自身的优势,根据三点稳定性原理,三吊点的伸展机构结构在平面抗旋转抗扭转性能优于四吊点的结构,而且其相对应的卷扬机构的设计研发也相对简单,其安全性能相对于4 绳卷扬机构有很大提升,而其可靠性相对于8 绳卷扬机构有大幅提高。
三吊点伸展机构(图3)在原前后两吊点伸展支架的基础上,解决了在钢丝绳应力释放以及风载情况下整体的扭转问题以及在左右方向上的偏摆问题。在卷扬起升机构的设计研究上,必须满足国标对设备零部件的设计要求,可选用螺旋槽加强制排绳的卷筒结构,如果排绳空间足够也可选用折线槽加自由排绳的卷筒结构。
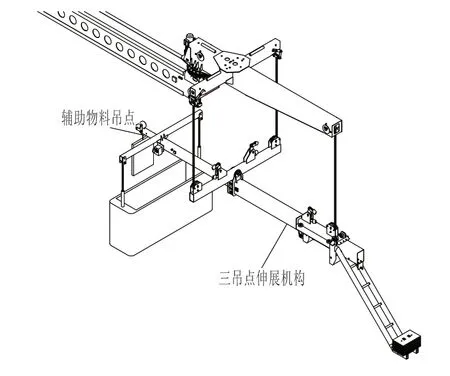
图3 三吊点伸展机构
三吊点的伸展机构在结构上大幅度降低了结构自身扭转和偏摆的问题,但是在吊船的防风约束问题上,同样存在和两吊点伸展机构同样的问题,为此,我们在吊船上引入软绳约束系统。带软绳约束系统的吊船可单独使用,也可以与伸展机构结合使用。
4 吊船自约束系统研发及应用
4.1 吊船自约束系统研发
GB 19154-2017《擦窗机》对吊船防风约束的要求是:擦窗机在受风力影响的户外区域使用并且作业高度大于40m 时,应安装约束系统或有限制使用。吊船在倾斜面工作时,需要采取特殊措施。
擦窗机的约束最常见的形式是工作钢丝约束(图4),即将悬挂吊船的钢丝绳作为擦窗机防风约束的载体,通过锁套或其他装置将钢丝绳与建筑物约束在一定距离范围内,从而达到约束吊船的目的。
工作钢丝绳约束的形式能解决建筑立面垂直或有较小斜度的大多数的擦窗机约束,但是在建筑外立面有挑檐、弧线变化或凸出凹陷造型时,工作钢丝绳约束使用就会受到限制,此时需要采用与建筑成一体的框架结构约束或使用吊船本身的软绳系统进行约束。
如图4 图所示,左侧约束系统为工作钢丝绳约束,使用悬挂钢丝绳作为载体。右侧为使用软绳约束系统进行约束,此时吊船升降时,其约束不再以悬挂钢丝绳作为载体,而由自身集成的软绳机构,在垂直的方向上每间隔约20m 设置一道约束,在吊船受到风载的情况下,约束系统能将吊船保持在一定的范围内,防止安全事故发生。
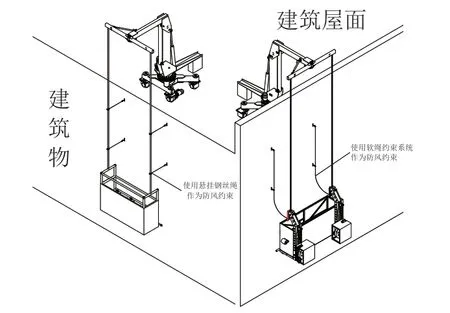
图4 擦窗机约束简图
软绳机构的工作原理类似于提升机电动吊船的钢丝绳收绳机构,使用摩擦传动,其收绳速度必须大于吊船的升降速度。比如擦窗机吊船升降速度为18m/min,则软绳收绳机构收绳速度最低速度应大于18m/min。尤其要注意的是,软绳机构的供电来自于悬挂钢丝绳,一般选用220V 电压,因此必须在主电控柜设置一个安全隔离电压供软绳机构驱动电机使用。
4.2 自约束吊船与伸展机构结合应用
要解决吊船伸展机构的旋转和偏摆问题以及远距离防风约束施工操作困难的问题,就要将三吊点伸展机构与带软绳约束系统的吊船结合使用。如图5 所示,三吊点的伸展机构在结构上解决了旋转和偏摆,吊船软绳机构解决了风载偏移。

图5 集成多吊点及自约束使用简图
5 结语
对于擦窗机系统来说,随着建筑造型的越来越多样化,对我们的设备功能及性能提出了更高的要求,在严格地使用和操作条件的要求下,也是对擦窗机功能本身以及人机友好环境的提升。
