基于改进卡尔曼滤波的列车舒适度平稳性测试仪
2021-08-03陈子文李广军陈世鑫
陈子文,李广军,陈世鑫
(江苏理工学院 a.机械学院;b.汽车与交通工程学院,江苏 常州 213000)
0 引言
随着国内铁路技术的发展,对车辆乘坐品质的要求日益提高,对车辆运行过程中的振动情况进行实时监测也提出了需求。国内对于列车舒适度平稳性测试仪已有了一些研究,早期的测试仪基于虚拟机实现,设备庞大不便携带,数据通信需要经过布线,检测不便;随着集成电路技术的发展,逐渐产生了基于单片机、DSP、SOC等技术的测试仪[1-3],但由于计算速度和集成化的局限,性能各有不足。目前,ARM微处理器具有极高的运算能力和丰富的外设,可集中实现AD转换、数据处理、数据通讯等多项功能,无需单独设计电路模块。同时,得益于微处理器的高运算速度和数字滤波算法的迅速发展,测试仪可实现较为复杂的数据滤波处理,使测量结果更加精确。文中提出了一款基于自适应抗野值卡尔曼滤波的便携式列车舒适度平稳性测试仪,通过对测试仪的软硬件的设计,其可实现实时的列车三向加速度的测量和舒适度平稳性的计算,并通过蓝牙模块与上位机进行无线传输,具有较高的精确性和便携性。
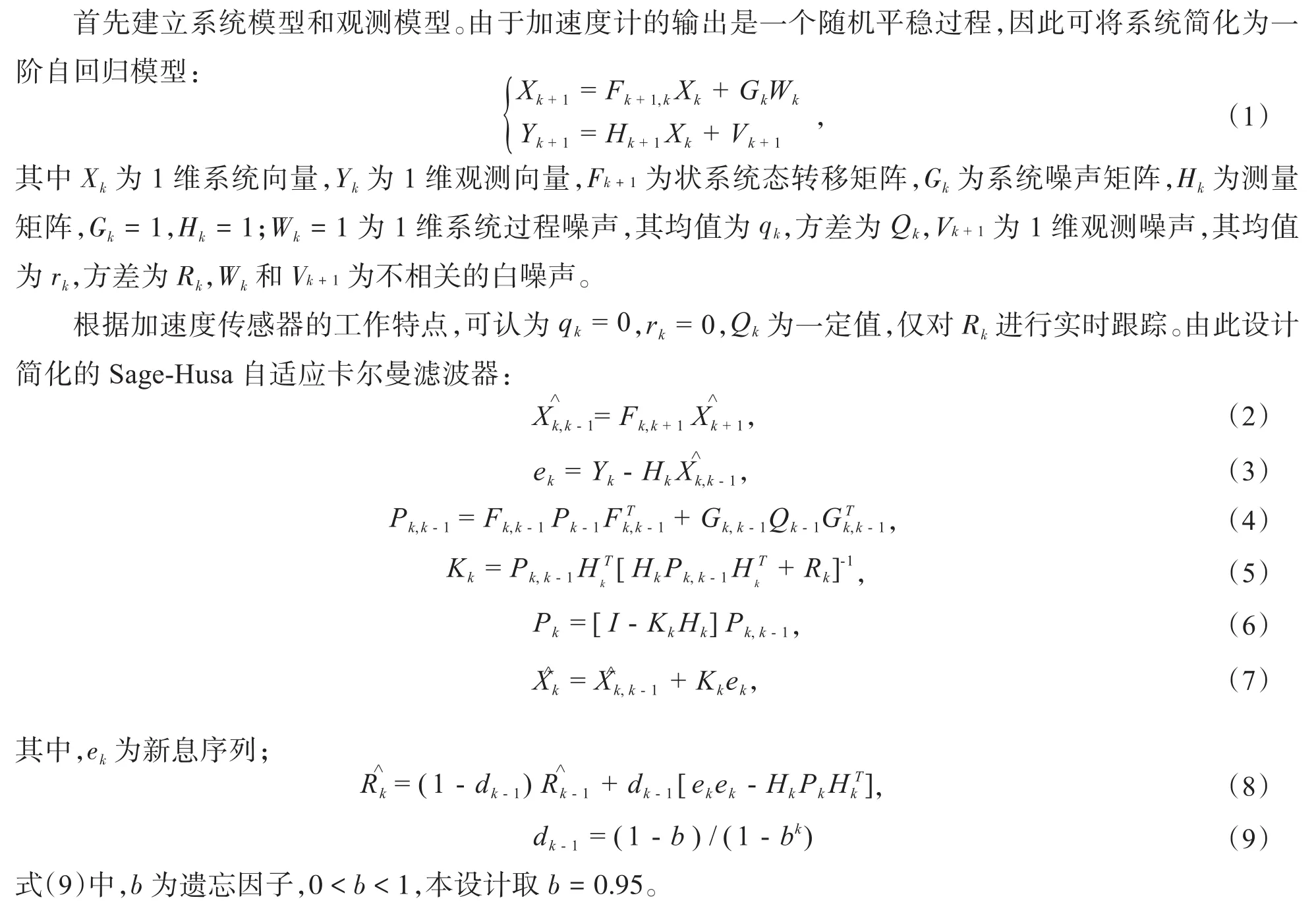
1 加速度信号滤波处理
加速度传感器在实际测量过程中,由于自身测量精度的限制和环境随机干扰的影响,测量结果往往出现较大的误差,通常需要对原始数据进行降噪处理。卡尔曼滤波是一种最小方差的最优估计,常作为动态数据处理方法。但普通卡尔曼滤波器往往有以下缺陷:第一,普通卡尔曼需要知道系统和观测噪声的统计特性,而实际噪声特性往往是未知且随机的;第二,加速度传感器有时会因系统和环境不稳定出现成片野值,对测量结果产生较大影响[4-9]。因此,我们针对无线舒适度平稳性测试仪,设计了一种自适应抗野值卡尔曼滤波,以提高数据精度。
1.1 自适应卡尔曼滤波器设计
1.2 抗野值滤波算法

1.3 巴特沃兹低通滤波器
为了比较改进卡尔曼滤波方法的优越性,设计了与通常采用的巴特沃兹低通滤波方法进行效果对比的实验方法。根据列车的振动特点,设定巴特沃兹数字滤波器的参数为:通带截止频率wp=40 Hz,阻带截止频率ws=80 Hz,采样频率f=40 Hz,归一化频率Wp=wp/(f/2),Ws=ws/(f/2),通带最大衰减Rp=0.3 dB,阻带最小衰减Rs=60dB,则通过 matlab 函数[n,Wn]=buttord(Wp,Ws,Rp,Rs)可得到最小阶数n=11,截止频率Wn=0.2355,进而通过matlab函数[B,A]=butter(n,Wn)可得到11阶数字滤波器系数。
1.4 仿真验证
为了验证改进卡尔曼滤波方法的效果,针对列车垂向振动的滤波处理进行matlab仿真验证,仿真步骤如图1所示。

图1 滤波方法仿真步骤
美国运输部联邦铁路总署在铁路安全标准中公布了六个级别线路的功率谱密度函数,六个级别根据安全限度和允许速度进行划分并分别定义了高低不平顺、轨向不平顺、水平不平顺和轨距不平顺的谱密度表达式[10-13],其中六级轨道谱的高低不平顺谱密度为:

式(13)中,Sv(Ω)为高低不平顺功率谱密度[cm2/(rad/m)];Ω 为空间频率(rad/m);粗糙度常数Av=0.0339cm2/(rad/m);截断频率Ωc=0.8245rad/m;安全系数k=0.25。取速度V=100 km/h≈27.78 m/s,空间波长为 0.5~50 m,采样间隔Δ=0.001 s,仿真时间T=10.24 s,采用傅里叶逆变换法将功率谱密度函数转化为轨道不平顺的模拟时域数值,结果如图2所示。

图2 美国六级高低不平顺轨道谱时域值
接着,建立二自由度列车悬挂模型如下:

式(14)中,r为路面输入信号;zs为悬挂位移;zt为车轮位移;轨道车体质量ms=210kg;车轮质量mt=30kg;悬架弹簧刚度ks=16 000N·m-1;车轮等效刚度kt=16 000N·m-1;阻尼系数Cs=1750N·s/m。

其中,

令采样时间Ts=0.001 s,得到离散化的状态空间:
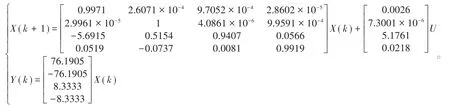
以美国六级轨道谱的高低不平顺值作为离散化状态空间的输入,可得到列车垂向加速度,作为仿真验证的真实值,如图3所示。为了验证本文提出的滤波方法,在真实值的基础上加入400 Hz观测噪声:0~3 s,加入方差为0.3的高斯噪声;3~10.24 s,加入方差为1.2的高斯噪声;同时在6~7 s,加入方差为10的高斯噪声作为一段成片的野值信号。加入噪声后的观测信号如图4所示。

图3 列车垂向加速度

图4 加入噪声后的观测信号
以上述信号作为观测值,分别通过普通卡尔曼滤波器、巴特沃兹低通滤波器(以下简称低通滤波器)、自适应抗野值卡尔曼滤波器(以下简称改进卡尔曼滤波器)三种方法进行滤波处理。其中,普通卡尔曼滤波器观测误差设置为0.3,改进卡尔曼滤波器可根据观测信号实时跟踪观测误差,无须设置。三种滤波方法的结果分别如图5、图6、图7所示。同时以先前仿真得到的真实值为标准,计算了三种滤波方法的均方根误差如图8所示。

图5 普通卡尔曼滤波信号

图6 低通滤波器滤波信号
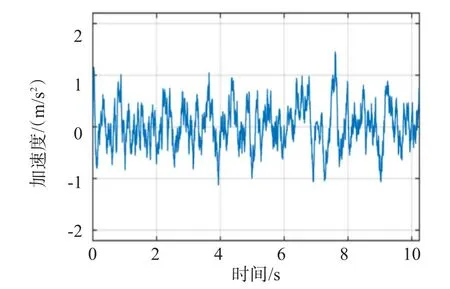
图7 改进卡尔曼滤波信号

图8 三种滤波方法均方根误差
通过分析可知,0~3 s期间,由于普通卡尔曼滤波器设置的观测噪声与实际一致,得到了较好的滤波效果,三种滤波方法效果大致相同;在3~6 s期间,由于观测噪声增大,与普通卡尔曼滤波器设置不符,所以普通卡尔曼滤波器出现了一定的误差,低通滤波的误差则较大;6~7 s期间,由于成片野值信号的出现,普通卡尔曼滤波与低通滤波的波形波动巨大,误差大幅增加,而改进卡尔曼滤波未出现明显波动,误差增幅很小;最终,由于野值信号的消失,三种滤波的误差缓慢下降,改进卡尔曼滤波的误差一直稳定在极低的范围内。综上所述,本文提出的改进卡尔曼滤波方法得到的滤波信号波形平稳,最大均方根误差较巴特沃兹低通滤波与普通卡尔曼滤波相比,分别减少了96%和93%,可以有效降低因观测噪声估计值不精确、野值信号干扰所引起的误差。
2 硬件设计
测试仪系统总体框架如图9所示。系统分为上位机和下位机,下位机由微处理器、储存模块、加速度传感器模块、蓝牙模块和电源模块组成,其中电源模块可为系统其他模块提供稳定的供电电源,并且可通过Micro USB接口对锂电池进行充电。三轴传感器可将车体横向、纵向、垂向的加速度原始数据传入微处理器,微处理器可根据相关标准实时计算舒适度和平稳性指标,并通过蓝牙模块将检测结果传输给上位机。

图9 测试仪系统总体框图
2.1 电源模块
电源模块通过AAP2967-33稳压芯片为系统各模块提供稳定的3.3 V电源。使用LN2054电源管理芯片,通过USB接口外接电源可对锂电池进行充电。绿色和黄色led灯分别指示系统开机状态和充电状态。
2.2 加速度传感器模块
测试仪采用14位精度的三轴加速度传感器 MMA8451Q,提供±2 g/±4 g/±8 g 三种可选满量程,输出频率为1.56 Hz~800 Hz,封装大小为3 mm×3 mm×1 mm,与微控制器之间采用I2C进行通信。
2.3 蓝牙模块
通过WH-BT200模块,测试仪可与具有蓝牙功能的终端机进行无线通信,支持连接7个设备,内置2.4 G板载天线,无需外接天线,通过串口与微处理器进行通讯,传输速率可达3 Mps。
2.4 微处理器
选用美国意法半导体公司生产的STM32F407VGT6芯片作为系统主芯片,STM32F407VGT6采用32位ARM Cortex M4内核,工作频率高达168 MHz,具有多达1 MB的Flash储存器和192 KB的SRAM储存器,满足了测试仪进行大量复杂运算的要求。
2.5 包装设计
由于采用了集成度较高的元器件,因此测试仪PCB板大大减小,测试仪包装尺寸为35 mm×35 mm×23.5 mm,重量小于100 g,使测试仪具有较高的便携性,如图10所示。

图10 测试仪包装
3 软件设计
下位机软件以Keil uVersion4为开发环境,C语言编程,根据UIC513《铁路车辆内旅客振动舒适性评价准则》[14]和GB/T 5599—2019《机车车辆动力学性能评定及试验鉴定规范》[15]定义的方法计算舒适度和平稳性。系统的主函数流程图如图11所示。进入主函数后,首先判断是否为看门狗复位,如果是,则直接上电,如果不是则等待长按电源键3秒后上电并进行初始化。初始化中,将加速度传感器采样频率设置为400 Hz,量程为±2 g,设置定时器以400 Hz的频率采集加速度传感器数据,在定时器中断程序中,每2000个数据将舒适度计算标识置位,每800个数据将平稳性计算标识置位。在主函数的循环中,通过查询标识则可实现每2秒计算并发送一次平稳性,每5秒计算并发送一次舒适度。同时每经过1000次循环,通过AD模块计算一次电池电量并发送给上位机。循环期间如果检测到长按电源键则关机。

图11 系统主函数流程图
上位机软件设计基于Delphi平台,软件可实现蓝牙设备的连接与断开、数据的储存与回看及绘制实时数据曲线图,在参数配置中可对曲线图坐标轴范围、加速度传感器三向数据的偏置值、数据存储位置进行配置。
4 实验验证
为验证测试仪的正确性,在某段高铁线路上进行了测试,实验时长为30分钟。以垂向加速度为例,检验改进卡尔曼滤波效果。垂向加速度原始数据如图12所示,从图中可看出,实验过程中出现了多次干扰信号,选择584 s至590 s之间出现连续野值的部分进行局部滤波效果对比,滤波结果分别如图13、图14、图15所示。

图12 垂向加速度原始数据

图13 低通滤波结果

图14 普通卡尔曼滤波结果

图15 改进卡尔曼滤波结果
从图13、图14、图15可以看出,三种滤波效果中,改进卡尔曼滤波器取得了的效果最佳,能很好地排除野值信号的干扰。
将测试仪采集到的加速度原始数据通过matlab算法进行平稳性和舒适度计算,再与测试仪的测试值进行对比,检测结果与计算值对比数据如表1所示。

表1 检测结果与计算值对比
5 结语
文中提出了一种结合自适应与抗野值算法的卡尔曼滤波方法,设计的这一款基于改进卡尔曼滤波的无线舒适度平稳性测试仪,解决了普通卡尔曼滤波需要得到噪声统计特性以及抗干扰能力较弱的问题。经过仿真验证,该方法可有效降低野值对加速度检测的干扰。根据实际需求,完成了测试仪的软硬件设计,并在某高铁线路上进行了现场测试,结果证明,测试仪具有良好的精确度和便携性。
