穿戴式下肢外骨骼机器人研究现状
2021-08-03张明路钟道方张小俊
张明路,钟道方,田 颖,张小俊
(河北工业大学机械工程学院,天津 300401)
近年来,中国逐渐步入老龄化社会,老年人行动不便及患病后的康复性治疗训练都迫切需要大量的穿戴式下肢外骨骼机器人介入。同时,在国防民生等领域,也需要大量穿戴式下肢外骨骼机器人辅助人类完成重物的搬运、负载等任务。
下肢外骨骼机器人的设计与控制是机构学、仿生学、自动控制等多个学科的交叉,包含了传感、控制、信息传递等多种技术。近年来,该研究领域发展迅速,是中外研究热点。传统的下肢外骨骼机器人研究多以其功能进行分类,但不同功能的机器人在结构方面存在大量重叠,以从结构角度阐述了穿戴式下肢外骨骼机器人目前的研究进展,对机器人最新的技术材料、驱动方式、能源供应方式等内容进行了介绍,最后总结了穿戴式下肢外骨骼机器人未来的发展方向。
1 穿戴式下肢外骨骼机器人结构设计研究现状
穿戴式下肢外骨骼机器人的结构设计大体是依照人类下肢的骨骼关节结构进行设计的,分为髋关节、大腿、膝关节、小腿、踝关节和足部六个部分[1-3],也有少数机器人省略踝关节和足部[4-8]。机器人是通过其髋关节、膝关节、踝关节的协调来协助完成人体下肢活动。根据辅助结构的不同,穿戴式下肢外骨骼机器人可分为无辅助两足式和有辅助两足式;根据足部结构的不同,穿戴式下肢外骨骼机器人还可以分为点接触式和面接触式,机器人的辅助结构和足部结构可以进行任意形式的组合。
1.1 无辅助两足式和有辅助两足式
1.1.1 无辅助两足式
Wehner等[4]基于仿生原理研发的Soft Exosuits,外套装有McKibben软式气动执行机构,致动器通过织带网络连接到系固点上,基于虚拟锚技术降低了行走过程中穿戴者的代谢消耗。Fontana等[9]研发的用于运输和处理重物的全身外骨骼Body Extender(图1),基于增强人体性能外骨骼系统设计有22个自由度,可与操作者身体平衡放置。

图1 Body Extender外骨骼[9]
魏小东等[10]研发的穿戴式下肢外骨骼康复机器人,采用无辅助结构的机体构架,行走时依靠左腿髋关节中的电机转动,通过谐波减速器、输出轴和键传递到左边的大腿组件上,右腿会相对于左腿向后摆动来完成一系列的行走动作。Yu等[11]提出了外骨骼辅助机器人(HEXAR),整体包括15个自由度,在脚踝处采用仿人足部设计,能够更好地增大与地面的接触面积,保证了穿戴者在行走过程中的稳定性。He等[12]提出了一种名为Auto-LEE的辅助外骨骼,可为用户提供自平衡行走的能力,甚至能通过脑电图(electroencephalogram)和操纵杆来操纵系统。
1.1.2 有辅助两足式
Ugarte等[13]基于人工智能原理推出了下肢外骨骼机器人(Exo-H3),该机器人可配有拐杖辅助下肢行动不便的人进行康复治疗,同时拥有通信功能、手机APP控制行走等现代设计理念。以色列ReWalk Robotics公司采用倾斜传感器研究的ReWalk机器人[14],基于倾斜传感器原理可以检测穿戴者运动重心位置变化(图2),同时还具备手动按钮调节机体功能,借助辅助装置,髋部支撑结构能够为瘫痪患者提供物理治疗方式。

图2 ReWalk机器人[14]
朱爱斌等[15]发明的一种主动助力装甲车救援外骨骼机器人下肢结构,足部安装有被动式髋关节助力模块,在被动式髋关节助力模块上设置有主动式起重臂助力模块,为穿戴者提供助力以及重力支撑。盛一宣等[16]基于推力法研究了一种减重车助力辅助下肢机器人重心转移的装置,分析了重心转移装置,通过模仿人体膝关节和肌肉的协调作用来完成迈步功能。时兆义等[17]设计了一款用于拐杖辅助的下肢外骨骼机器人,拐杖除了辅助穿戴者的功能,还具有实时感应地面压力以及控制关机电机的作用,保证穿戴者的安全。
目前,宁萌等[18]开发一种带有智能助力、可穿戴在行走障碍患者下肢进行康复训练或行走助力的机器人设备,可以实现支撑真实行走训练和辅助行走两个功能(图3),最大程度地辅助穿戴者完成行走动作。
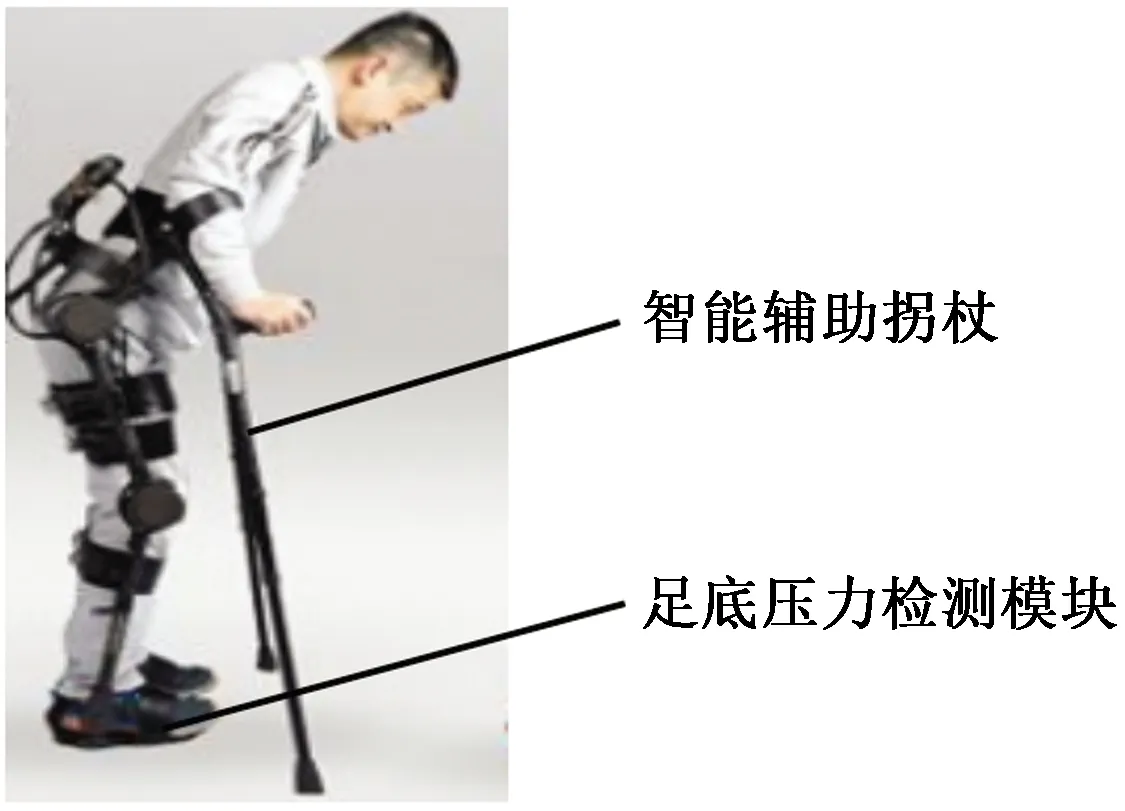
图3 智能助力机器人[18]
1.2 点接触式和面接触式
1.2.1 点接触式
穿戴式下肢外骨骼机器人对于足部接触地面的结构形式也有所不同,通常分为点接触与面接触形式。李健等[19]发明了一种采用点接触形式的柔性穿戴式下肢外骨骼机器人,采用足部调节结构,由横梁杆、足部调节杆、弹簧绳索组成,可实现足部调节。兵器集团202所研发的外骨骼系统可加装辅助装置[20],该装置足部基于点接触形式接触地面,结构简单,能够良好地辅助单兵携带重物,提高单兵训练能力。
1.2.2 面接触式
李静等[21]研发的一种可穿戴外骨骼式下肢步行训练康复机器人,采用足部面接触形式,底板上固定连接带有脚底聚酯纤维感应层的脚底橡胶减震层,基于足底压力传感器分析原理,帮助穿戴者感应脚底运动环境。孙阳阳等[22]基于仿生原理发明了一种足式仿人机器人,分析了机器人关节驱动结构,模仿人体足部运动状态,增大与地面的接触面积,提高人体运动的稳定性。邱静等[23]研究的PRMI助行外骨骼机器人,基于临床步态分析数据设计与人体下肢贴合度相近的机器人,足部与人体足底面重合,为人体重量提供支持,辅助穿戴者完成基本的运动。
Zhou等[24]基于人体下肢运动机构的基础上设计了一种新型可穿戴式下肢外骨骼结构,该机器人足部采用双层结构设计,基于足底压力传感器采集的信号判断外骨骼脚是否触地,从而更好地判断穿戴者行走时的姿势。
综上,穿戴式下肢外骨骼机器人下肢结构类型的性能比较如表1所示。
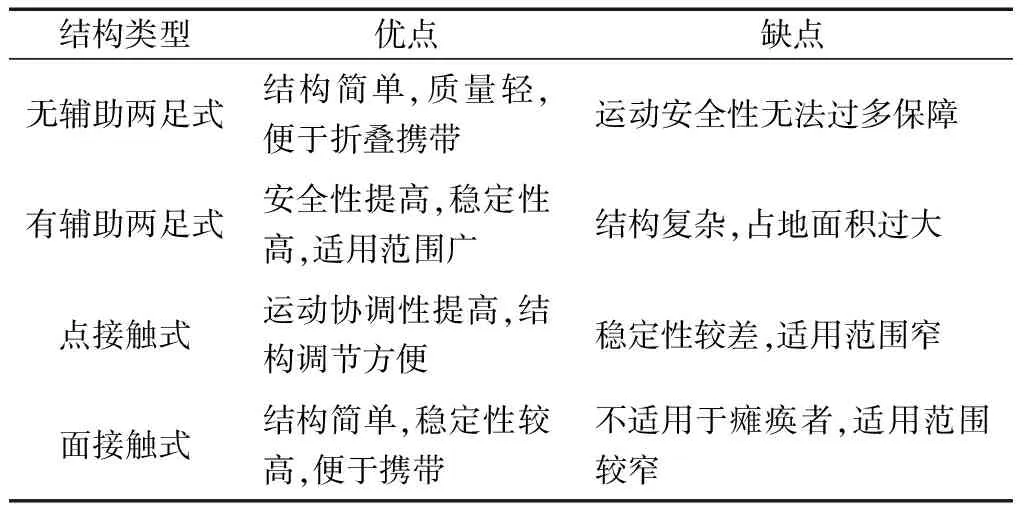
表1 下肢结构类型性能比较
2 新科技材料在穿戴式下肢外骨骼机器人的使用
在传统穿戴式下肢外骨骼机器人设计制造过程中,机架及关节多由铝合金和钛合金制造,相比钢铁等做到了材料轻量化,保证了机器人运动的灵活性。随着科技的发展,更多新型复合材料被用于穿戴式下肢外骨骼机器人,如碳纤维复合材料(图4)[25-26]等,进一步减轻了机器人的重量,降低了成本,节省了能源,延长了机器人的使用寿命。
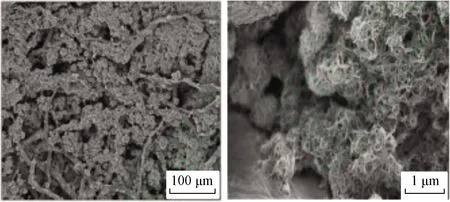
图4 碳纤维复合材料
美国仿生控股有限公司(Ekso Bionic)研制出一种采用钛合金、碳纤维复合材料等多种轻量化材料的下肢外骨骼机器人Ekso[27],相比于传统的机械结构设计,降低了机体的整体重量。
宋荆洲等[28]研制的一款新型机器人碳纤维臂杆,采用了碳纤维环氧树脂作为碳纤维杆的材料,钛合金接口件分别位于碳纤维杆两端。为了使连接部分更加牢靠,采用了钛合金接口件与碳纤维杆混合连接的关键技术,整体设计减轻了重量,提升了续航。
傅里叶智能公司研发的Four-ier X2下肢外骨骼机器人[29]基于生物力学与人体工程学设计使用了大量碳纤维等复合材料,在保证整体结构刚度的同时将负重感降至最低,同时多出安装记录人体步行状态的传感器,可感知患者穿戴上设备后的运动轨迹。
苏州挪恩复合材料有限公司[30]研发了一种采用碳纤维材料来制作外骨骼机器人。在结构上,该机器人的机构自由度近似于人体下肢的自由度分布,机构的外形及质量分部类似于人体下肢,达到了拟人的理想状态。在能源消耗上,由于其整体部件减重了约20%,大大减少了电力消耗。结合了新型材料碳纤维的可穿戴外骨骼产品应该会在未来实现普遍应用。
3 驱动方式
3.1 传统驱动方式
穿戴式下肢外骨骼机器人传统驱动方式主要包括液压驱动、气压驱动、电机驱动等[31]方式。其中液压驱动方式与气压驱动方式的原理相似,是以液压油/气体作为工作介质,通过液压缸/气缸分别连接在穿戴式外骨骼机器人的大腿、小腿和足部以实现穿戴式外骨骼机器人的人体活动。美国加州大学伯克利分校开展了伯克利下肢末端外骨骼(BLEEX)的项目研究[32]。BLEEX主要由机架主体、能源装置、动力装置、通信设备以及液压控制系统等五部分组成,实时获取运动及力等信息。贾山等[33]基于液压驱动系统研制的动力外骨骼机构SPAEX,通过液压传动装置调节关键部位辅助人体运动,基于人工智能检测原理计算穿戴者的运动意图。
Hong等[34]研发的一款下肢行走辅助装置,通过气压缸驱动、力传感器以及相位检测器辅助该装置完成对穿戴者的训练,具有更好的舒适性。赵慧等[35]基于人体下肢外骨骼机器人结构设计理念,利用气压优势设计了一款采用气压驱动方式的下肢外骨骼机器人。Yang等[36]基于自适应模糊人工神经网络控制原理提出了气动作动器下肢外骨骼,通过肢体与神经网络控制的协调作用预算出得出穿戴者下肢动作。
电机驱动技术目前比较成熟,易控制,但也存在缺点,即电动机动态不够平衡。Duong等[37]研发的PRMI外骨骼机器人,采用扁平电机与谐波减速器的组合对髓关节和膝关节进行驱动,姿势仪、编码器以及肢体上的传感器组成了机器人的感知系统。周伟杰等[38]通过驱动伺服电机带动外骨骼机器人运动,运用九轴传感器对角度进行测量,一定程度上达到了对穿戴者的助力效果。He等[12]提出了智能可穿戴下肢外骨骼机器人(Auto-LEE),其关节助力部分采用独立直流电机驱动,基于人机交互模式研究出了多种通用步行算法。
3.2 现代驱动方式
3.2.1 人工肌肉驱动
人工肌肉驱动方式充分利用了拟人化的设计思想,仿照人体肢体关节的柔顺性与协调性,从而使外骨骼机器人实现运动[39]。Hussain等[40]提出了一种符合要求的机器人矫形器使用气动肌肉,机器人在矢状平面允许髋关节和膝关节旋转。Park等[41]基于气动人工肌肉设计了一种可穿戴的踝足康复机器人,其机体结构采用了柔性结构,分析了自然状态下踝关节的自由度,实现对受伤下肢的辅助康复训练。
Galle等[42-43]基于气动人工肌肉研究了一款气动外骨骼机器人,该机器人可在踝关节提供跖屈助力,并在足部配有开关控制,经验证,与未穿戴该设备比较,穿戴者大幅度降低了能量消耗。朱延河等[44]开发了一种采用气动人工肌肉驱动的穿戴式下肢外骨骼机器人,该机器人在髋部驱动系统采用髋关节前屈驱动气动人工肌肉、髋关节后伸驱动气动人工肌肉,解决了现有下肢外骨骼机器人柔性差、仿生性能差与人体协调程度低等问题。
3.2.2 串联弹性驱动
对于穿戴式下肢外骨骼机器人来说,僵硬的驱动系统不利于人体安全以及对环境的适应,因此,对驱动器柔顺性以及舒适性的研究是必要的。应用最广泛的柔顺型驱动器是串联弹性驱动器,它能够大大提高驱动器的耐冲击性,增加机体的平稳性[45]。Haeufle等[46]将离合器与弹簧并联的驱动器应用于下肢外骨骼机器人;Kardan等[47]设计的FUM-KneeExo机器人由串联弹性驱动器驱动,将两个弹簧放置于滚珠丝杠机构的螺旋轴上,保证了驱动所需的柔顺性。
Wang等[48]基于弹性联合驱动方式研发了Mind-Walker下肢外骨骼机器人,该机器人系统采用扭转弹簧、线性致动器联合驱动,可达到90%的实际机械效率,保证了精确的联合扭矩感知。李金良等[49]对于下肢外骨骼机器人踝关节混合柔性驱动做出了设计与研究,基于各种监测步态的传感器,分析了不同步态相位下如何实现混合柔性驱动,对比了柔性驱动与刚性驱动的性能,从而进一步得出穿戴式下肢外骨骼柔性驱动的必要性。
3.2.3 其他驱动方式
在微型机器人领域中,常需要配套微处理器,其中压电驱动[50]、功能性电刺激驱动方式[51]、超声波电动机驱动、形状记忆合金驱动[52]等是首要选择。天津理工大学樊成等[53]应用ICPF(ionic conducting polymer film)高分子驱动器制作了无线游动微机器人, 该机器人具备在线编程和实时充电等功能,且能够实现无声前进、左右转和避障运动等动作;刘林山等[54]研究的井下巡检机器人仿生关节基于超声电机驱动,采用基于DSP(digital signal processing)的电动机控制专用集成电路,分析了超声电机控制策略,能够完成此前较难实现的复杂算法,在未来发展中,可展望在穿戴式下肢外骨骼机器人的关节处理器上运用。
综上,目前穿戴式机器人主要运用液压、电机、气动等驱动器驱动,在噪声、体积、重量等方面存在不利影响,如何提高电机推重比,增加转矩密度,缩小体积,有效地利用机器人空间是提高电机利用率的有效途径;人工肌肉、串联弹性等驱动发展对机器人事业的高速发展至关重要,但仍然存在一些技术难题。
4 新能源供应技术
目前,穿戴式下肢外骨骼机器人的驱动系统以及控制系统都需要供电装置,传统能源多采用蓄电池作为动力,如日本“HAL-5”[55-56]采用蓄电池提供能量,为患者的康复治疗提供了能源保障,采用了电机驱动各个运动关节的关键技术,但机器人运动行程受到蓄电功能的影响,运行的有效时间往往只有几个小时,影响机器人的运行时间,探索一种新能源技术成为研究领域关注的热点,如燃料电池、太阳能能源、生物电池肌肉组织供电等。
早期,日本Speecys公司[57]制出的一款基于燃料电池提供动力的机器人,携带内置氢罐,通过一系列的化学反应能够为装置提供电力,且生电过程中无有害物质产生。同时在2018年推出的燃料电池安全机器人Oneberry RoboGuardTM,该系统与传统的电池供电的机器人相比,可以长时间离网工作,极大增加了机器人运作的时间。
Yan等[58]通过梯度高氢稀释技术,沉积接近非晶/纳米晶转变的非晶材料,制备出多结柔性非晶硅太阳能电池,提高了电池的有效利用率[59]。德国SFC公司研发的一种基于燃料电池技术与甲醇技术结合方式的新型燃料电池M-25[60],其工作时续航能力增强,比同等时长的传统电池轻,可借鉴相关技术研发一种更适合穿戴式下肢外骨骼机器人的新能源技术。
基于高效、低噪和轻小型的燃料电池、太阳能充电系统以及生物能源等新能源技术目前已在一些外骨骼机器人样机上进行了少量探索性研究,未来有望成为外骨骼机器人的主要能源供应方式。由表2可知,穿戴式下肢外骨骼机器人续航时间跨度较大,负重区间主要集中在50~100 kg,行走速度趋于人体行走速度,主要使用可充电电池为机体提供能源。

表2 典型穿戴式下肢外骨骼关键技术指标
5 发展趋势与展望
在面临养老、国防、制造业大量需求的今天,穿戴式下肢外骨骼机器人有良好的发展前景。较为全面地回顾了近年来穿戴式下肢外骨骼机器人国内外的发展情况,总结了穿戴式下肢外骨骼机器人结构的主要类型,针对机体新材料的轻量化在穿戴式下肢外骨骼机器人运用方面进行了重点阐述,探讨了传统驱动方式与现代驱动方式在机器人中的优缺点与发展趋势,并对能源方面的发展进行了展望。
未来穿戴式下肢外骨骼机器人应以轻量化、运动灵活和承担较大负载为发展方向,更加依赖新技术材料的使用和驱动及能源供应等关键技术的发展,如何高效、持续供能是未来穿戴式下肢外骨骼机器人长时间运行亟需解决的难题。此外,基于新材料和新技术的融合结构设计方式也亟需改进,以满足生产和生活的实际要求。