基于空间占用率判定的智能电梯控制系统设计*
2021-08-02张安莉石卓勇
张安莉,谢 檬,石卓勇
(西安交通大学城市学院,陕西 西安 710018)
0 引言
电梯在当代家居生活中承担着人流和物流运送的任务。自20 世纪80 年代以来,随着经济建设的快速发展,中国对电梯的需求量呈快速上升趋势,目前,中国已成为世界上最大的电梯市场,电梯运行能效指标变得及其重要[1-6]。
在实际的电梯系统运行中,经常遇到电梯内部装有的货物已经占满电梯空间,但在外部请求控制下,若质量未达到阈值,电梯还会开门的情况。该现象使电梯的能效指标下降,不利于节能[7]。本文针对这一问题,对电梯控制系统进行了优化设计。系统下位机利用光敏传感器模块对电梯内部占用空间进行测量。通过单片机采集光传感器模块光线被遮挡后输出的低电平个数,计算空间占有率,当达到电梯饱和的体积占有率阈值时,电梯控制系统不再受到外界请求信号进行开门控制,解决了传统电梯控制系统因无法判定电梯内部空间被占满而产生的门控无效打开问题。
为了实时监测智能电梯的运行情况,系统采用Lab-VIEW 搭建上位机,实时监测电梯运行。上位机实时显示空间占用率、当前电梯所在楼层以及占用率波形图;同时,对故障报警进行记录,具有历史数据查询功能[8-9]。
相较于传统的电梯控制系统而言,本系统更加节能环保,更加便于集中化管理,稳定性和便捷性更高。
1 系统硬件电路设计
电梯控制系统结构框图如图1 所示。系统由6 个功能单元组成,分别为STM32f103 CPU 单元、电梯内部状态显示单元、电梯内部键盘操作单元、电梯外部按键操作单元、体积占用率检测单元、步进电机和LabVIEW 上位机[9]。

图1 系统功能框图
1.1 STM32F103 CPU 单元
单片机最小系统包括STM32F103 主控芯片、晶振时钟电路、复位电路和电源电路。
STM32f103 CPU 单元进行信息的处理和获取,根据电梯调度算法,控制步进电机运行,实现电梯的升降和呼叫楼层的停泊。用户按下上行呼叫按键或下行呼叫按键呼叫电梯,CPU 通过对电梯内部体积检测单元检测到的数据进行体积占用率计算,控制电梯是否在呼叫层停泊。
1.2 电梯内部体积检测单元电路
电梯内部空间占有率检测单元由光敏传感器模块电路和体积占有率测量电路组成。光敏传感器模块电路如图2 所示。若干此光敏传感器,通过CPU 对低电平进行统计,若计数达到阈值时,单片机输出高电平,判定电梯体积占用达到饱和;否则,输出低电平,判定电梯体积未达饱和。

图2 光敏传感器电路原理图
1.3 电梯内、外部按键操作单元电路
电梯内部按键操作单元用于给处于电梯内部的用户提供一个可操作的界面。该单元主要由按钮开关组成,用于捕获用户的操作。用户通过按键选择目的楼层,并控制电梯的启动、停止和报警。
电梯外部按键操作单元用于给电梯外的用户提供操作接口,等待乘坐电梯的乘客通过按下呼叫按键(分为上行和下行两种)对电梯进行呼叫,电梯通过电梯调度算法响应用户的呼叫。电梯外部按键操作单元与电梯内部显示单元并联,实现内部显示与外部按键操作的实时同步[10]。
1.4 电梯内部显示单元电路
电梯状态显示单元用于给乘客提供电梯的运行状态信息,以便用户进行状态观测,及时发现故障信息。7段共阳数码管用于接收单片机P0.0~P0.3 口的输出信号,并根据信号来显示相应的数字。蜂鸣器用于发出报警声音,3 个不同颜色的发光二极管分别被用于标记电梯的上行或下行状态,以及报警状态。
1.5 电梯内部显示单元电路
步进电机负责电梯的升降,是电梯的动力部分。步进电机是将电脉冲信号转换成相应的角位移或线位移的电动机,由外部信号控制并驱动功率脉冲信号输出。每个脉冲信号使步进电机转动一定固定的角度,判定为旋转的总角度时,脉冲频率决定电机的旋转速度,改变电机绕组通电可以改变旋转方向的顺序。
2 系统软件设计
光敏传感器根据光敏电阻不同光照呈现不同的阻值的变阻特性,当电梯内部空间被物体占满时,其光照会被遮挡,从而使光敏电阻LDR 呈现高阻性,电路输出低电平;反之,电路输出高电平。将电梯桥箱的底部铺设
2.1 系统总程序设计
基于空间占有率判定的智能电梯控制系统程序流程图如图3 所示。程序初始化后,当外部按键被扫描到按下时,如果电梯不在当前层,则马上响应并运转,否则仍然停在当前层。当内部按键按下时,需再次按下启动键,相当于实际中的“关门”,此时,电梯以内部按键按下的楼层为目标层运行。在电机运转循环中,也增加了内外按键的扫描,以使电梯运行时能接受请求。同时,在运行过程中,对体积占有率进行检测,当体积不满足搭乘条件时,对外部请求不予响应。

图3 系统总程序流程图
2.2 系统前面板设计
智能电梯控制及检测系统上位机前面板采用仪表盘显示空间占有率程度,数字显示具体占有率数值。数据库表格用于记录历史数据,并以波形图的形式显示电梯空间占有率。系统前面板程序流程图如图4 所示。

图4 前面板程序流程图
3 系统测试及结果分析
完成仿真程序设计与无线连接后,将相对应的端口接入上位机软件面板,打开软件界面,串口会显示所连接端口,选择创建的COM 端口即可完成无线连接[11]。接着完成参数设置,并进行测试。
3.1 下位机测试
基于Protus 仿真平台进行下位机仿真测试[11]。由开关模拟光传感器输送给电梯系统的检测信号,通过单片机处理后从P1.0 口输送信号给PB7 口,控制电梯是否收到外部请求中断信号。当电梯内部体积检测超过12 个低电平时,P1.0 口向PB7 口持续输送低电平,电梯不受外部中断信号控制;反之,电梯受外部中断信号控制,进行正常运行。假设初始行程1 的电梯起始楼层为1 层,目标楼层为4F,电梯内部容积未占满,2F 有下行请求信号,对电梯进行测试。电梯运行情况统计表如表1 所示。
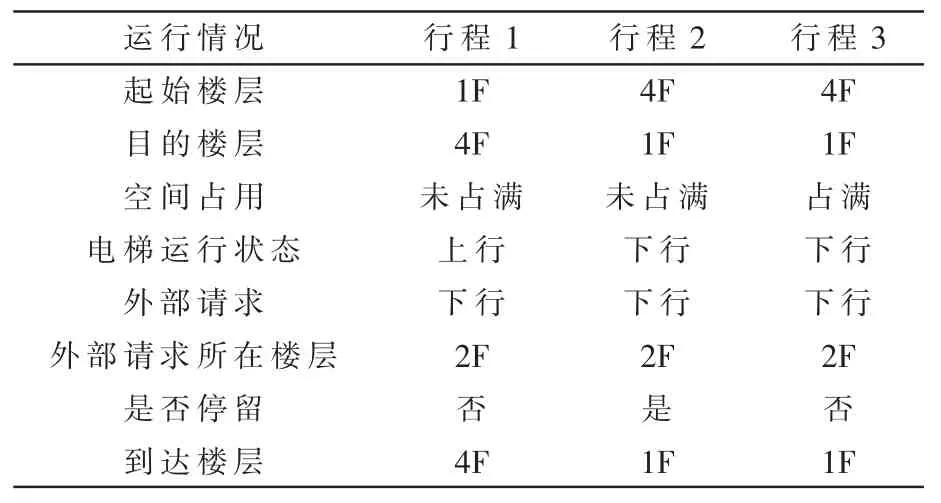
表1 电梯运行情况统计表
测试结果表明,当电梯内部体积占有率未达到阈值时,电梯对外部请求予以开门响应;当电梯内部体积占有率超过阈值时,电梯对外部请求不予开门响应,功能满足设计要求。
3.2 上位机功能测试
采用LabVIEW 搭建系统上位机,进行智能电梯控制系统之无线传输智能电梯监测系统的功能测试[12]。设定电梯空间占有率阈值为0.8,设置无线传输系统配置模块,进行系统联调测试。
系统前面板如图5 所示,设置了当前所在楼层显示、实时空间占用率数据呈现、电梯占用率仪表盘、超阈值告警和历史占用率波形图等功能。图5(a)为空间占用率低于阈值时的系统面板,当前测试电梯处于2F,空间占用率为0.42,电梯正常运行;图5(b)为空间占用率高于阈值时的系统面板,当前测试电梯处于4F,空间占用率为0.92,告警灯亮起。
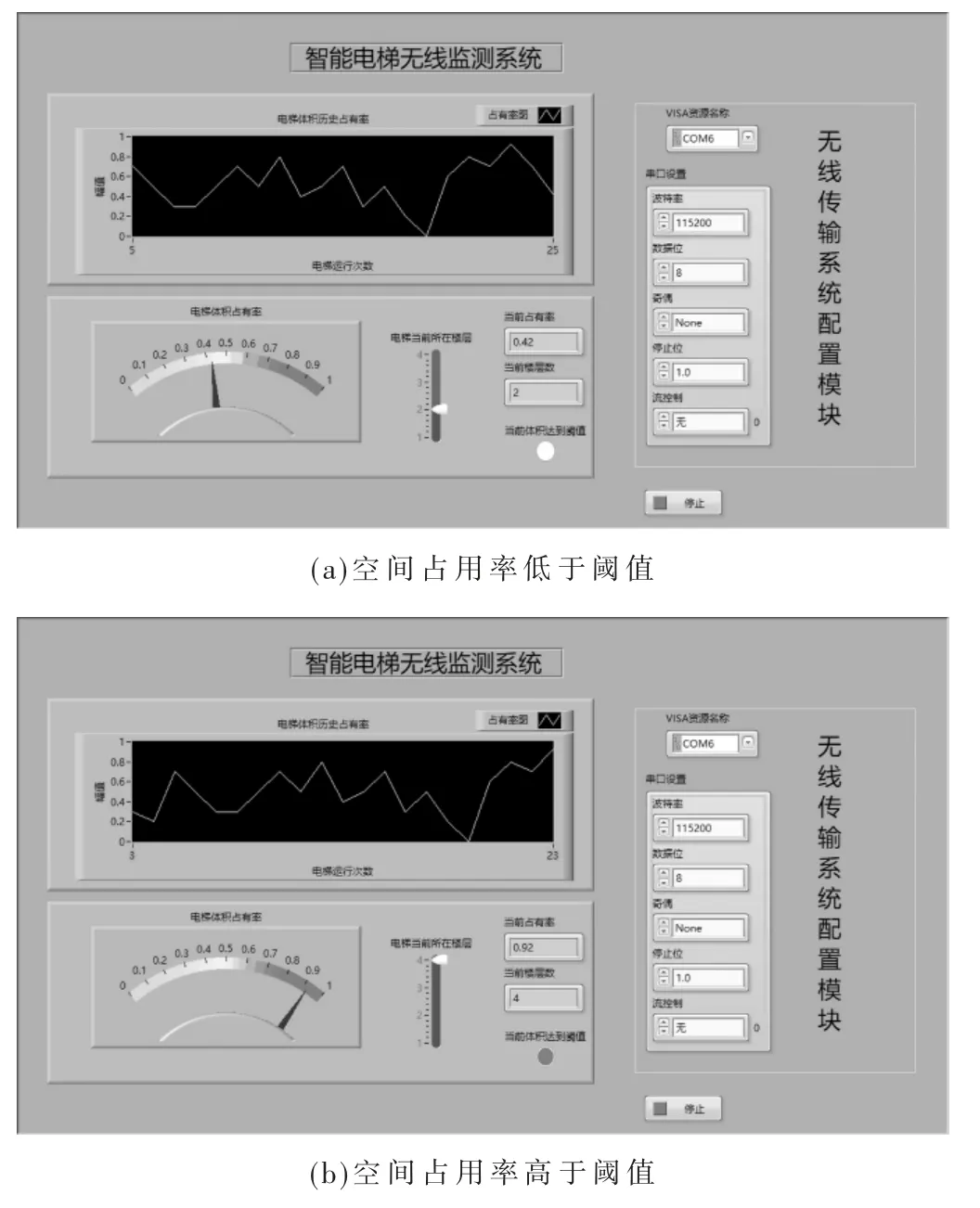
图5 系统前面板
测试数据及结果表明,系统能够准确传输无线传输下位机数据,实时显示当前楼层和空间占用率,并绘制空间占用率波形。
3.3 系统联调功能测试
为了验证系统测试的准确性,进行系统联调功能测试。将上位机与下位机进行无线蓝牙连接,无线蓝牙选用H05芯片,通信协议为TCP/IP 协议,波特率为115 200 b/s[13]。通过读取LabVIEW 历史数据观测下位机运行状况,进行共计25 次的测试。测试结果表明,系统可对超过空间占有率阈值的运行予以显示并报警,下位机此时对外部请求不予响应。
调用LabVIEW 历史数据,利用MATLAB 绘制空间占用率波形图,如图6 所示。可见,LabVIEW 前面板空间占用率波形图与系统前面板空间占用率波形一致,表明系统功能正常,数据传输准确无误。

图6 电梯空间占用率波形图
为了验证系统的实际可行性与准确度,在西安交大城市学院行政楼的一部电梯中进行了电梯空间占用率的测试。传感器采用自研光敏传感器模块,单片机采用STM32F103,无线传输采用H05 无线模块,上位机采用LabVIEW 搭建。对底面积为2.15 m2的电梯每20 cm铺设一个光敏传感器,共均匀铺设了9×6 个光敏传感器,用面积分别为2 m2和0.6 m2的两块遮挡板采用随机摆放遮挡光线的方法进行测试,各采样10 个采样点。统计如表2 所示。
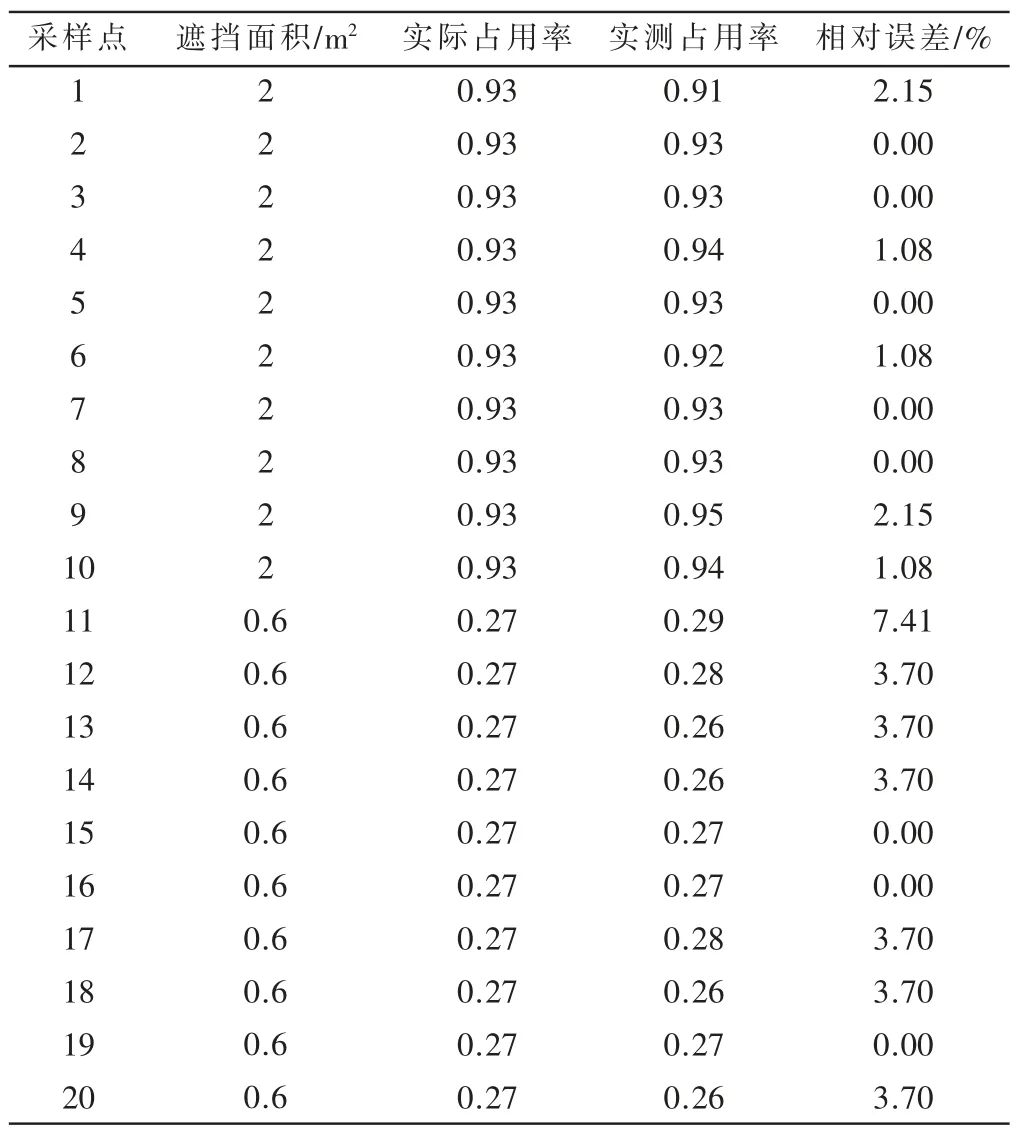
表2 空间占用率测试统计表
相对误差的计算公式如下:

式中,Y为相对误差值,Xa为标准值,Xb为测量值。可得,空间占用率相对误差为0%~7.41%。对数据进行拟合,绘制空间占有率曲线[14]。拟合方程分别为S1和S2,空间占有率曲线图如图7 所示。
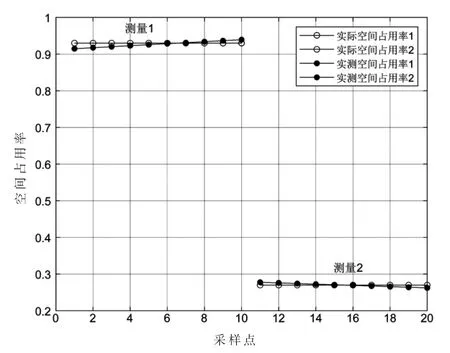
图7 空间占用率实测曲线图
拟合方程S1和S2分别为:

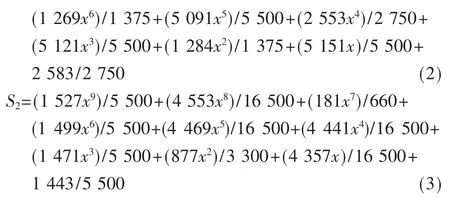
拟合后的数据进行相对误差计算,可得测量1 的平均相对误差为0.03%,测量2 的平均相对误差为0.05%。将检测算法进行优化,代入拟合方程式后,其测量精度可得到明显改善。
4 结论
本文所设计的基于空间占有率判定的智能电梯控制系统下位机采用STM32F103 单片机作为主控芯片,通过光敏传感器测试空间占有率,根据占有率阈值判定外部请求开门操作,解决了电梯无效开门的问题;上位机通过无线传输与下位机进行通信,上位机面板设计采用LabVIEW 图形编程方式,用指针和曲线形象地表示了空间占有率数据实时曲线[15]。同时,实现实时数值显示、故障报警记录等功能。经测试,系统可实现对空间占有率的检测、电梯运行数据的实时采集及显示,并可依此进行电梯智能控制。相较于传统的电梯控制系统,本系统更加节能环保,更加智能,更加便于系统化、集中化管理。
