基于视觉测量的光纤定位闭环控制方法
2021-07-30刘志刚
曹 建, 刘志刚
(中国科学技术大学 工程科学学院,安徽 合肥 230027)
大天区面积多目标光纤光谱天文望远镜(LAMOST)在其直径为1.75 m的焦面板上安装有4000根光纤定位单元。在天文观测时,每个定位单元运转带动一根光纤对准一个星象,接收天体的星光传输到光纤另一端的光谱仪中进行光谱分析。
目前,光纤定位采用的是开环控制模式。根据预先定标得到的单元定位参数以及定标曲线,计算出对应单元运转至目标位置所需要的脉冲数,控制单元运转[1]。开环控制系统逻辑简单,便于操作,但是主要存在以下两点问题:① 每年对焦面4000根单元进行预先定标,需要分成14个区进行,耗时半个月,期间望远镜无法执行观测任务,而且随着单元定位次数的增多,定位参数以及定标曲线也会发生变化,定标带来的误差将长期影响定位精度[2];② 定位精度依赖于机械零位稳定性[2],每轮观测前,单元需要回到零位再展开一固定角度作为起始点,机械零位的稳定性直接影响单元定位精度,而且每轮观测前回零降低了望远镜的观测效率,无法满足下一代光纤定位技术的要求。为了同时观测更多的星象目标,将会采用无零位的小尺寸定位单元,光纤纤芯尺寸减小,定位精度进一步提高,依靠机械零位和预先定标的开环控制模式将不再满足设计要求[2]。
因此,为了保证光纤定位精度和提高定位效率,提出在控制系统中加入摄影测量模块,对光纤位置进行实时检测,并反馈至控制系统,控制定位单元多次运转向目标位置逼近,从而实现对光纤定位单元的闭环控制。
1 闭环控制系统组成
目前,已经在LAMOST现场搭建一套完整的闭环控制实验系统,如图1所示,主要包括:摄影测量系统、照明系统、图像采集系统和主控系统。
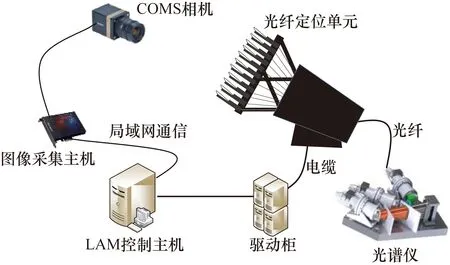
图1 闭环控制系统示意图
(1) 摄影测量系统:由高分辨率COMS相机和长焦镜头组成,位于距离焦面约20 m远的MB主镜四周,目前只控制一台相机和该相机视场内的部分光纤单元进行闭环实验,最终需要6台相机视场才能完整覆盖整个焦面区域,多台相机的控制将是一个独立的系统,接受主控系统的指令,控制对应的相机进行拍照测量。
(2) 照明系统:采用背照法,即在光谱仪端点亮LED,光线通过光纤从焦面端出射,每一个光斑代表了一个光纤单元的当前位置。光纤单元定位时,LED亮,定位完成;LED灭,星光从焦面端入射,到达光谱仪[3]。
(3) 图像采集系统:通过图像采集卡与相机相连,接收主控系统的拍照指令,控制相机拍照,并处理图片,提取出光纤单元的位置,反馈至主控系统。
(4) 主控系统:发送拍照指令,根据图像采集系统反馈的光纤单元位置,计算单元运转所需的脉冲,控制单元向目标位置逼近。
2 光纤位置检测稳定性
光纤位置检测稳定性是指在静态条件下,利用相机在相隔较短的时间内连续拍摄提取到的光纤位置坐标会因为振动、气流以及温度变化等环境因素引起的偏差大小[4]。提高光纤位置检测稳定性是实现闭环控制的前提。
2.1 稳定性实验
在近似观测环境下,利用MB下方埃科光电的TTS50MCL-15M相机(4800万像素)加上NIKON 800 mm f/5.6E FL ED镜头连续拍摄G区光纤定位单元30 min,每分钟拍64张,取后25 min 1600张图片计算光斑在这1600张图片上的像素坐标的标准差作为稳定性结果。去除前5 min数据是为了降低相机温度逐渐升高对结果的影响。
经过计算,所有光纤位置坐标的标准差为0.4765个像素,每个像素约占105 μm,即光纤位置检测的波动达到了50 μm,不能够满足LAMOST光纤定位精度40 μm的检测要求。每一个光斑的稳定性如图2(d)所示,具体计算过程如图3所示。
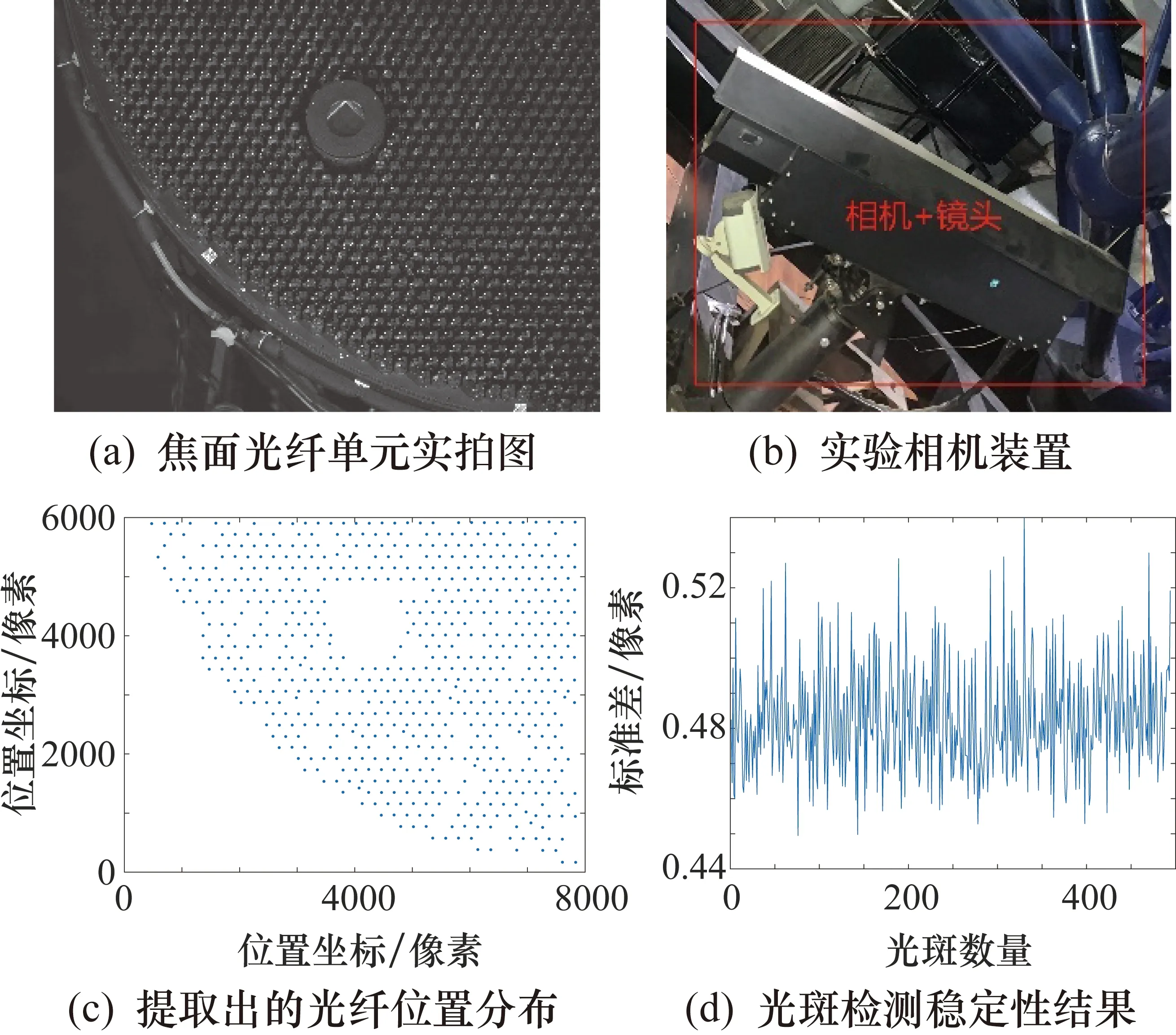
图2 光纤位置检测稳定性实验图
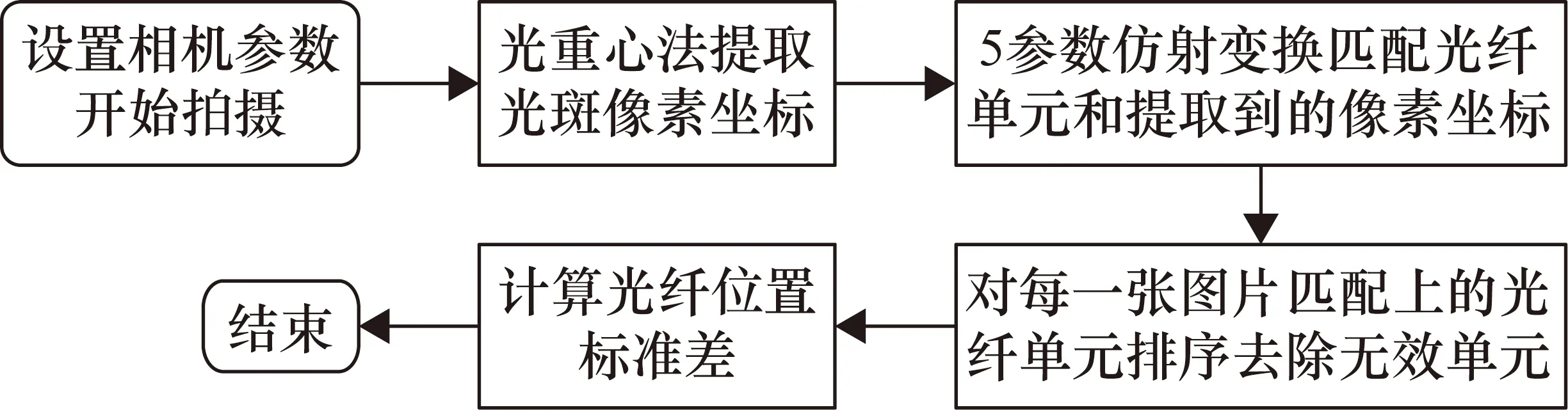
图3 稳定性计算流程
2.2 提高稳定性的方法
考虑到振动以及相机漂移等因素对一张图片上的所有光斑的影响是相同的,所以一张图片上的所有光斑的像素坐标都是朝着同一个方向有一个偏移,但是不同的图片有着不同的偏移量(误差为1,2,3,…,n)。
设置若干固定参考光纤,均匀分布在工作光纤四周。这些参考光纤和工作光纤在同一张图片上有着相同的偏移量。将一张图片上所有固定参考光纤的像素坐标取平均值,得到的就是参考光纤理论的像素坐标平均值加上该张图片受到的误差,再将所有工作光纤像素坐标都减去这个平均值,也就将该张图片上所有工作光纤受到的误差减去了,同时工作光纤像素坐标整体平移了一个量,如图4所示。但是这个整体平移将体现在后续的多项式拟合标定的参数上,不影响光纤的位置检测。
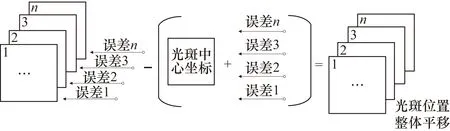
图4 减参考光纤平均值示意图
G1307光纤位置在减平均前后分布如图5所示,通过25张图片上G1307号光纤单元的像素坐标在减去平均值前后的分布情况看出,在减去平均值之前(蓝色点),有一个明显的线性漂移,在减去平均值后(橘色点),像素坐标位置波动变小,无明显系统漂移。所有光纤位置坐标的标准差降低到0.1011个像素,满足闭环控制光纤位置检测的精度要求。每一个光斑的稳定性如图6所示。
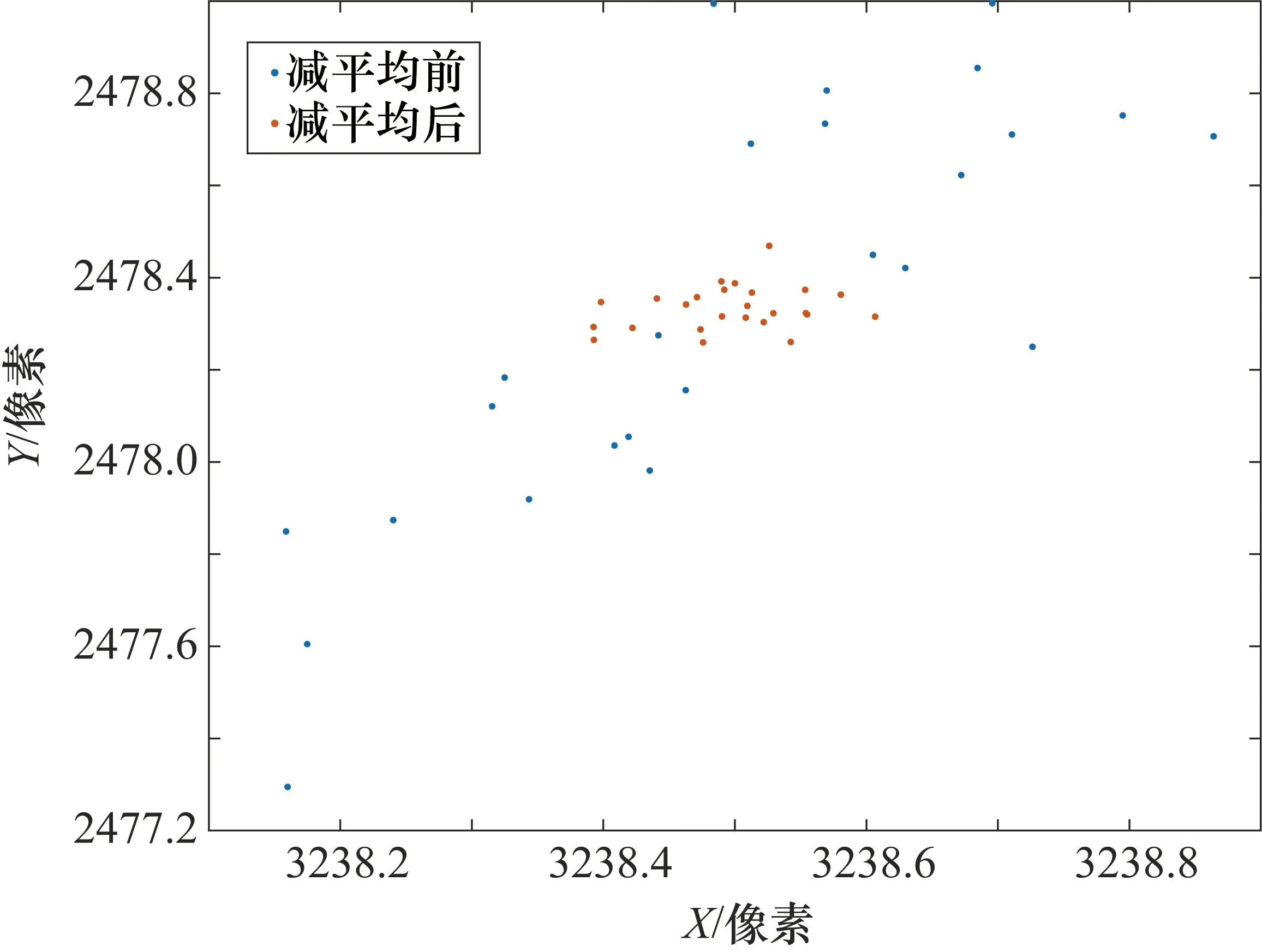
图5 G1307光纤位置在减平均前后分布
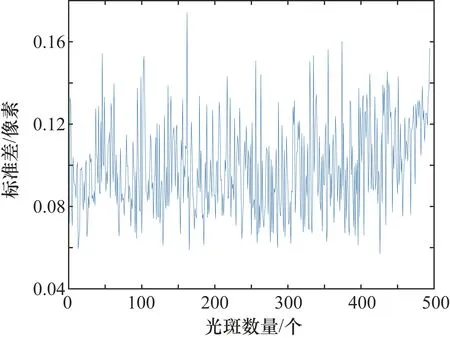
图6 光斑稳定性结果
减去平均值可以降低系统误差的影响,多张照片叠加取平均值可以减小随机误差的影响。叠加可以分为将原图灰度矩阵直接叠加取平均后再提取光纤位置像素坐标和提取出每一张图片上的光纤位置像素坐标后再将像素坐标取平均两种叠加方式。分别采用上述2种叠加方式计算光纤位置检测稳定性随着图片叠加张数的变化情况,结果如图7所示。
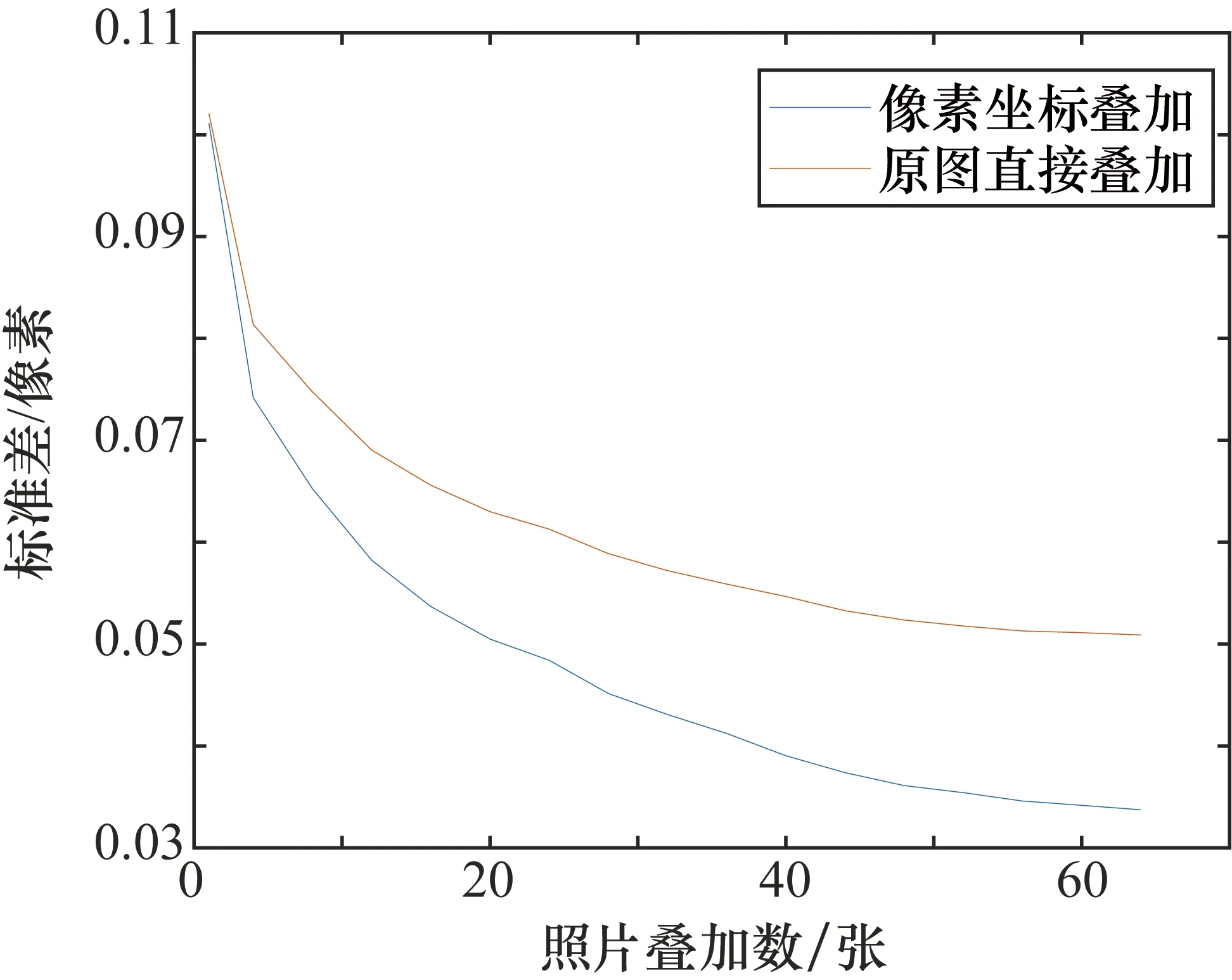
图7 稳定性随图片数的变化
从图7可以看出,标准差随着叠加张数的增加逐渐减小,最后趋于一个固定值。考虑到拍图以及数据处理的时间,闭环实验时选择像素坐标叠加5张取平均值。
3 闭环控制
3.1 双回转定位单元
LAMOST双回转定位单元[5]由一个中心轴和一个偏心轴组成,两轴各由一个电机驱动,中心轴旋转范围为0°~360°,偏心轴旋转范围为0°~180°,光纤端部位于偏心支架上,如图8所示。两轴组合运转,可以实现光纤在该定位单元最大运转范围内的任意位置的定位[6]。
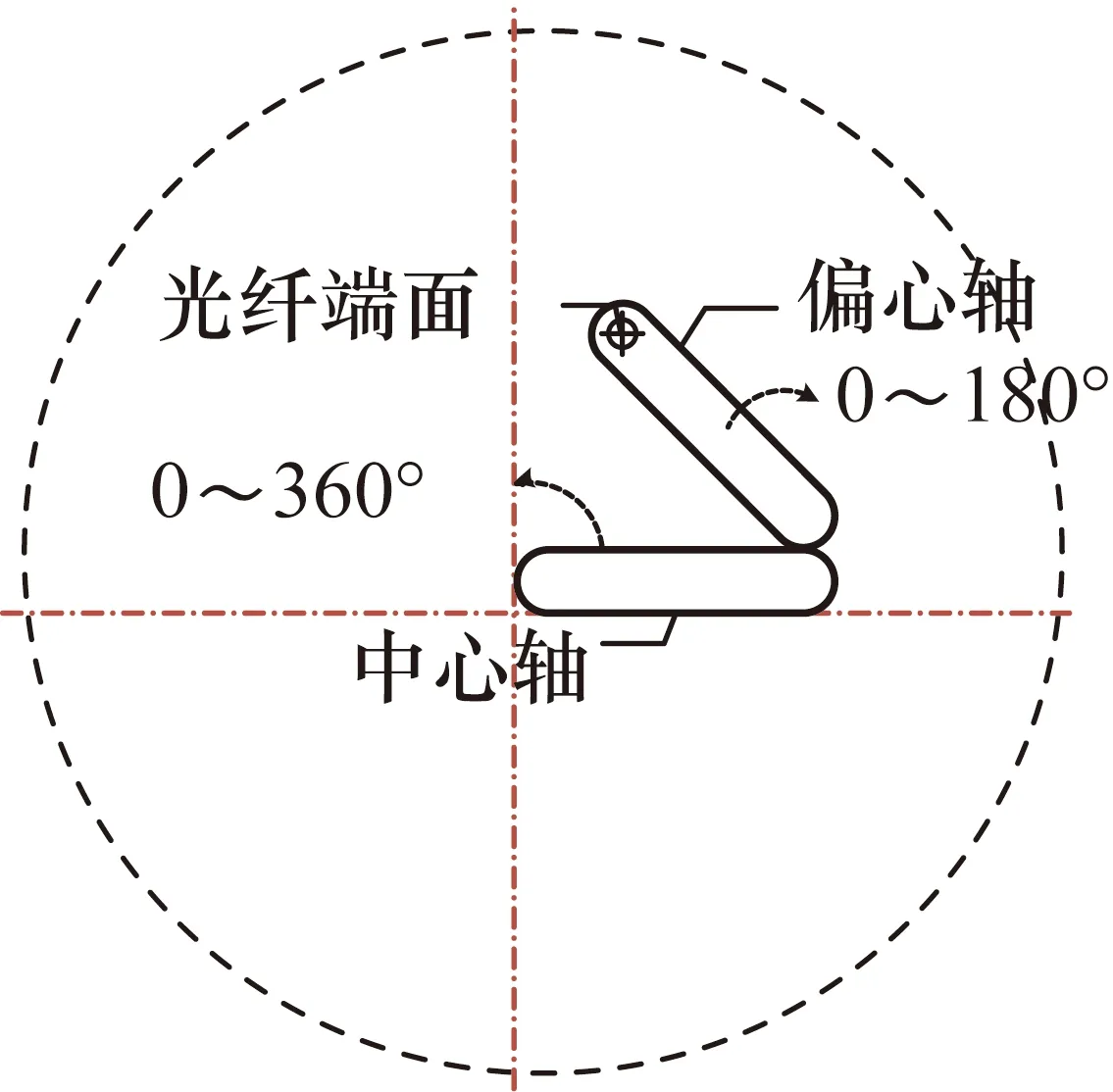
图8 定位单元
光纤定位时,需要得到中心轴和偏心轴应该运转的角度,才能实现光纤的定位,如图9所示。假设光纤当前位置为P0(X0,Y0),目标位置为P1(X1,Y1),那么,根据单元定标流程(图10)可知,只需要知道中心轴的回转中心坐标(X,Y)、中心轴回转半径R中和偏心轴回转半径R偏,就可以计算出中心轴、偏心轴在P0位置所展开的角度θ中0,θ偏0,公式如下:
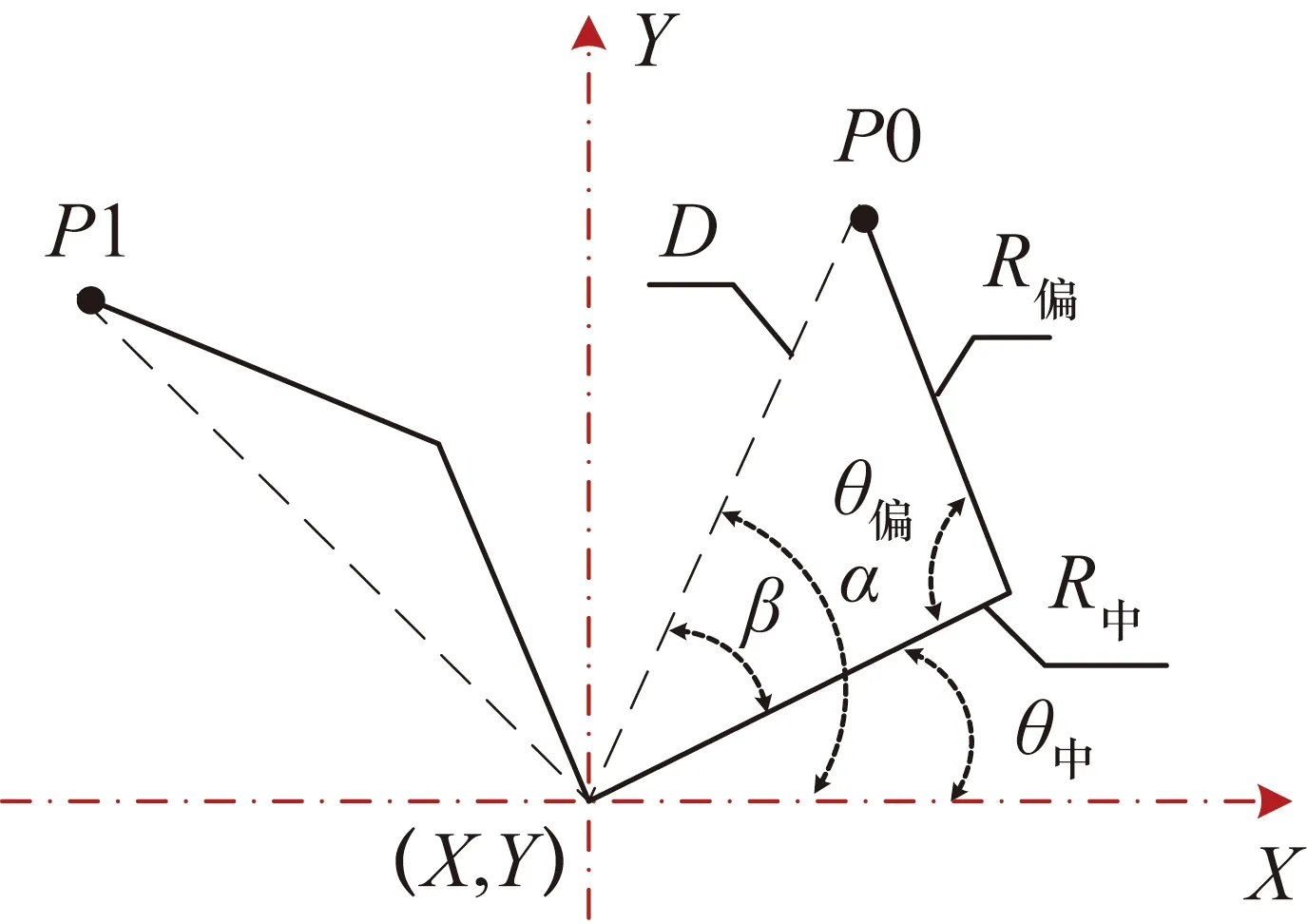
图9 定位原理图
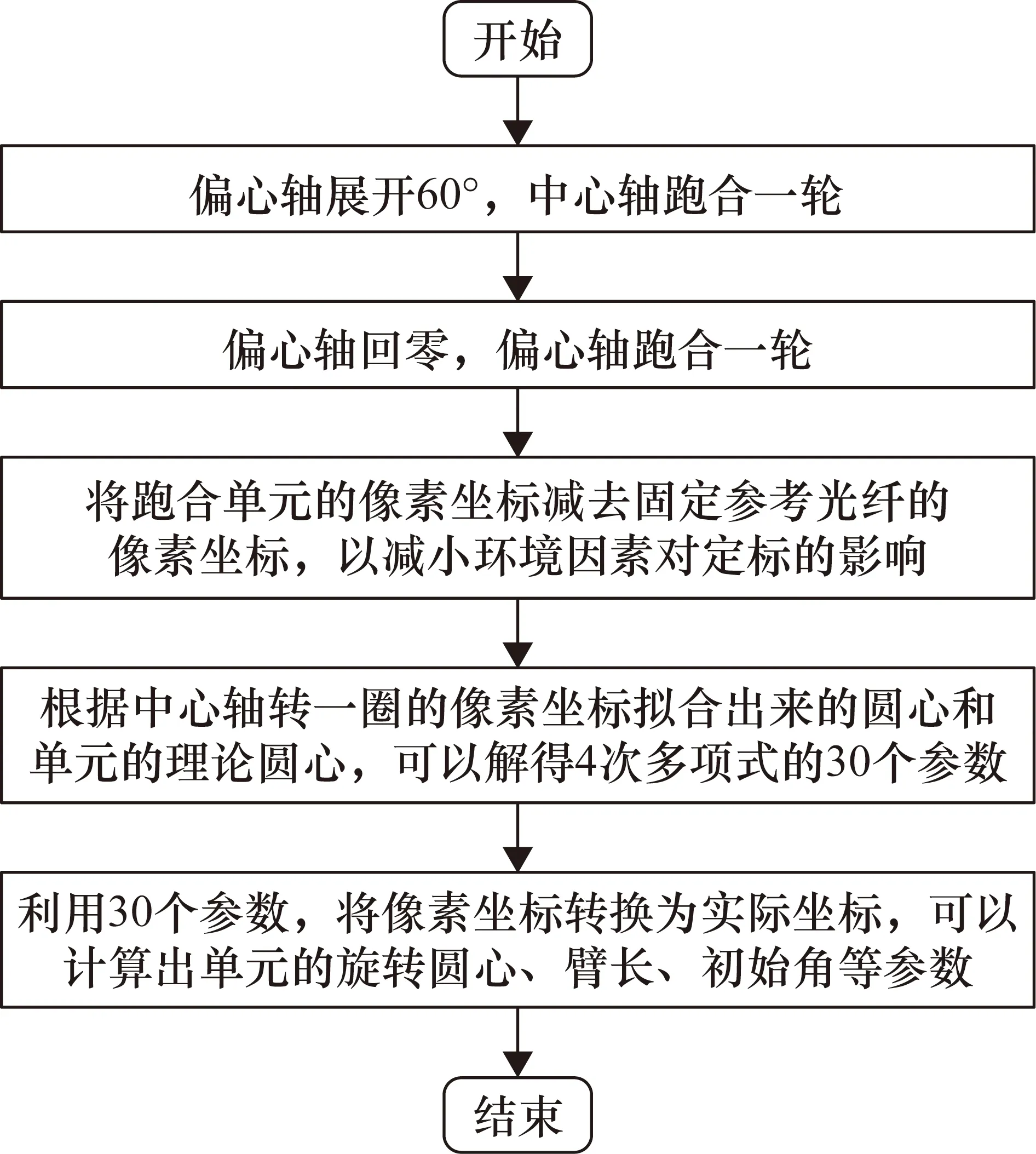
图10 单元定标流程
同理可以计算出在P1位置两轴所展开的角度θ中1,θ偏1,两者相减,就可以得到中心轴和偏心轴需要运转的角度[7]。
3.2 单元定标
为了得到每一个单元的中心轴回转中心和两轴的臂长作为定位参数,需要对单元进行定标。
但是单元定标不同于开环模式下的预先定标,不需要得到标定曲线[8],即脉冲和角度之间的对应关系,因此,只需要控制中心轴、偏心轴各走10个分度点即可,如图11所示。通过最小二乘法[9]拟合出旋转圆心坐标和旋转半径,定标时间小于10min。具体的定标流程见图10。
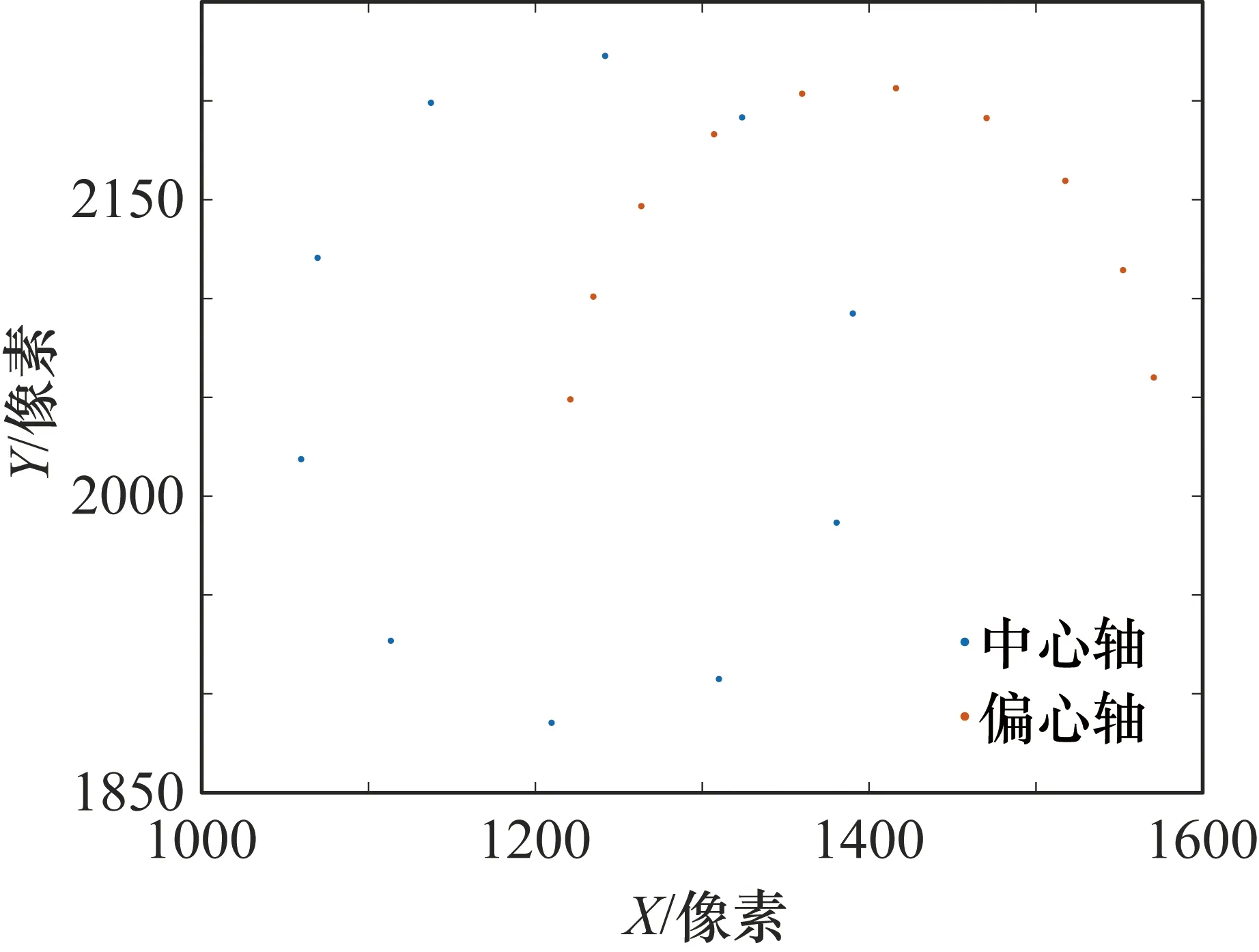
图11 单元定标两轴分度点
相机获取的像面坐标需要转换成实际的物面坐标,即相机的标定[10]。LAMOST一直采用的是多项式拟合标定,用高次多项式模型反映物面坐标和像面坐标之间的投影映射关系[11]。次数越高,物面坐标点和像面坐标点之间的映射关系也越加准确,但是求解多项式参数需要的坐标对也更多,同时可能会出现过拟合问题,即计算出来的参数并不能真实反映整个相机视场内物面坐标和像面坐标的转换关系,一些不参与求解转换参数的像面坐标通过参数转换到物面坐标时会出现扭曲[12]。因此,用来求解转换参数的坐标需要均匀分布在相机视场内,而且需要包围住所有待转换的像面坐标,不能是集中在视场的某一块小区域[13]。通过实验计算,闭环控制实验采取4次多项式标定模型。物面实际坐标(X,Y)和对应的像面坐标(x,y)的关系式如下:
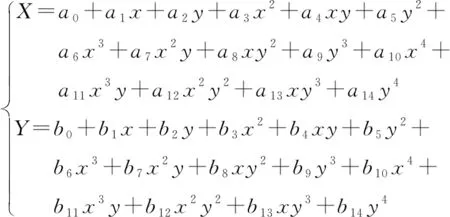
式中,a和b为需要求解的30个多项式标定参数;a0和b0为x、y方向上的平移量,减去的参考光纤理论像素坐标平均值也就是体现在了这两个参数上,通过这两个参数,抵消了平移的效果,不会对光纤位置的检测产生偏移;a1和b1为两个方向上的缩放比例;其他的高次参数为像差的修正系数和转角系数[14]。将单元安装在焦面板上的理论位置作为物面实际坐标,中心轴旋转一周拟合出来的旋转中心坐标作为像面坐标,通过最小二乘法拟合加上多次迭代,即利用求解到的30个参数,将像面坐标转换到实际物面坐标和理论坐标进行比较,去掉误差较大的坐标对,再次通过最小二乘法求解30个参数,直到所有参与求解参数的坐标对转换精度都满足精度要求,就可以得到最终的30个参数的解[15]。再通过4次多项式将像面坐标都转换到实际物面坐标系中去,得到实际的中心轴旋转圆心和两轴臂长等定位参数。
3.3 闭环控制实验
选取相机视场内运转正常而且光纤未折断的定位单元135根作为工作单元,再选取90根有出射光的单元临时作为固定参考光纤,分布在工作光纤四周。设定定位精度为40 μm,定位步数为3步,即当光纤与目标点距离小于40 μm时,就不再控制单元运转,当距离大于40 μm时,继续控制单元向目标点逼近,但是最多控制单元向目标点逼近3次。图12为在单元运转的范围内设计网格阵列点,作为目标点,验证闭环走位在任意位置的定位精度。
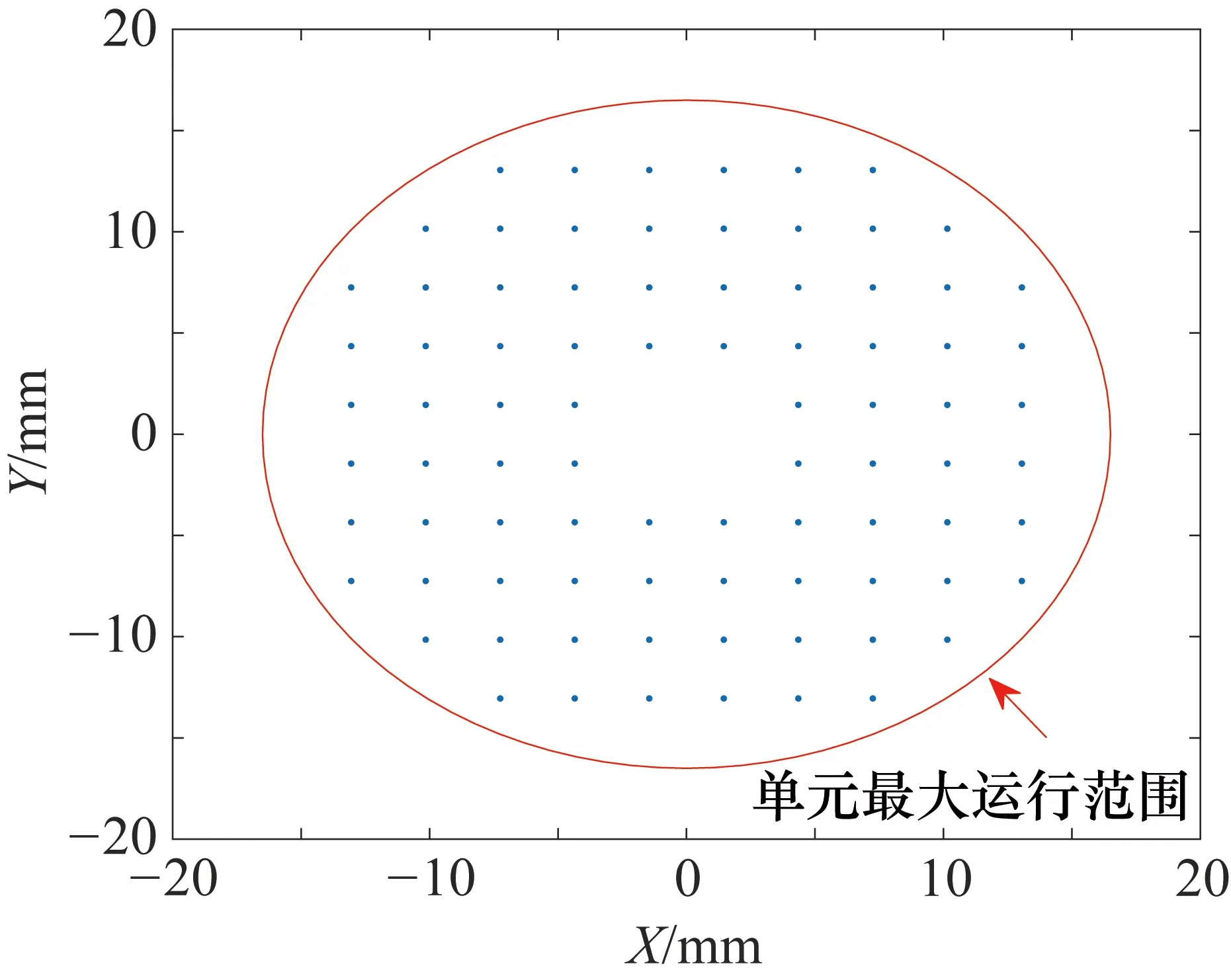
图12 84个目标点分布图
图13所示的闭环控制流程与单元定标时减去参考光纤平均值以降低系统误差的影响不一样,这里通过利用固定参考光纤像素坐标和理论实际位置拟合30参数,其中a0和b0就反映了当前这张照片的整体偏移情况,因此,每一张照片都拟合一个30参数,通过30参数转换到实际物面坐标时,相当于减去了该张图片的系统误差偏移量。
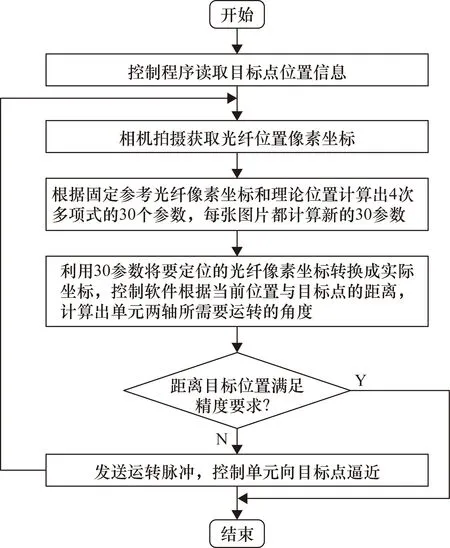
图13 闭环控制流程
3.4 实验结果与分析
由于数据量较多,随机选取了84个网格点中的10个进行具体的数据分析,结果如图14所示。
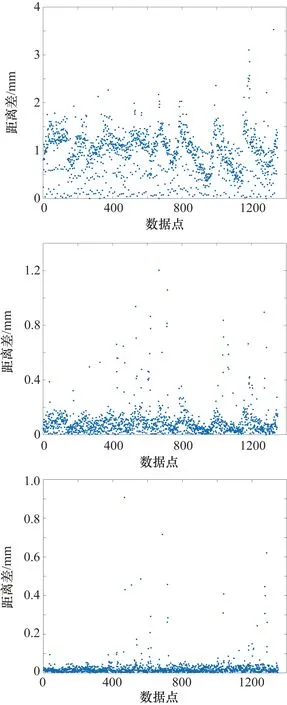
图14 闭环控制结果
图14显示了135根光纤定位单元每次定位结束后和目标点的距离差,横坐标为135根单元×10个测试点,也就是1350个分度点,纵坐标为距离目标点的差值,数据点越接近于横轴,也就是和目标点的距离差越来越小。从图14中可以看出,光纤定位单元逐渐向目标点逼近的过程中,走完第一大步之后,大部分光纤单元和目标点的距离在1 mm左右,再次控制单元向目标点逼近,距离差基本上都在200 μm以内,当走完第3步,除去个别单元,均能达到40 μm的控制精度。
图15统计了这10个点最终定位精度达到40 μm以及100 μm的单元所占的百分比。从图15中可以看出,除去第4个目标点外,其他9个目标点基本上90%的单元能够走到40 μm以内。分析第4个目标点数据发现,是由于存在8个单元在第2步走完已经达到40 μm的精度要求,但是定位精度误差在35 μm以上,第3步并没有再控制这些单元逼近目标点;第3步结束后,由于相机检测光纤位置稳定性的原因,这些单元与目标点的距离差有几微米的波动,正好稍大于40 μm,导致40 μm以内的单元占比降低,为82%。10个测试点基本上98%的单元定位精度都能达到100 μm,个别单元可能是由于长期工作,自身机械磨损,导致重复性较差,没有走到100 μm。
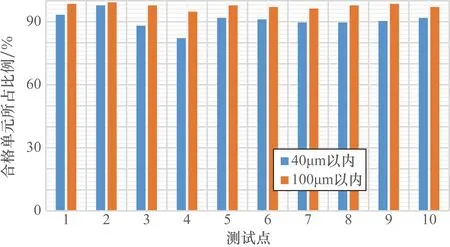
图15 10个测试点闭环控制结果
4 结束语
通过引入摄影系统,设置固定参考光纤,实现了对LAMOST现场光纤空间位置的高精度测量,并反馈至控制系统,自动控制光纤定位单元向目标点靠近,形成了对光纤定位单元的闭环控制。实验表明,90%的光纤定位单元定位误差小于40 μm,一个目标点的定位时间小于4 min,闭环控制能够有效地保证光纤定位精度和效率。后续将通过研究参考光纤的数量和分布,有望进一步提高闭环控制的检测精度。