航空发动机整机振动故障智能诊断技术研究
2021-07-30巩小强刘尚辉
巩小强, 刘尚辉, 李 冲
(西安飞机工业(集团)有限责任公司,陕西 西安 710089)
随着科学技术的快速发展,航空发动机的推力、转速、动强度等显著提高,导致发动机零部件的振动载荷不断增加,振动引起的故障显著增多;此外,发动机结构日趋复杂且质量不断减轻,其对安全性和可靠性的要求亦随之增高[1]。因此,发动机振动状态及振动特征的精准识别是判断发动机有无故障的主要手段,且发动机安全性、有效性及使用寿命可获得有效提高;同时,对于飞机适航性的增强、维修费的减少以及飞行事故的降低具有重要的工程意义。
近年来,大量研究者使用了BP神经网络和支持向量机对航空发动机进行故障诊断,并达到了较好的诊断效果,但专注于整机振动故障诊断的相关研究极少。费成巍等[1]应用支持向量机进行整机振动故障诊断,实验效果良好,诊断准确率较高;王志等[2]应用BP神经网络构建了整机振动故障诊断模型,结果发现,该方法诊断较精准,且有效减少了虚警率。然而,由于BP神经网络和支持向量机在局部极值、泛化能力、训练样本等方面存在着难以解决的问题[3],如BP神经网络的训练需要大量的样本,且容易出现过学习和低泛化能力的现象,支持向量机虽是针对小样本统计估计和预测的学习,但其仅能获得局部最优解,导致其可扩展性较低且稳定性较差,故它们的使用范围均存在一定的局限性[4]。因此,迫切需要引入一种当前机器学习领域的新方法。协同训练算法的应用极具前景,它有效地解决了上述问题,同时使用该算法学习获得的故障诊断模型具有强泛化能力,且对非线性数据的数学建模高效准确,因此在各个领域中得到了广泛应用。
实际应用中,数据是由多种属性特征所描述,并将其称之为多视图数据,故如何充分利用多视图数据的信息进行有效学习是机器学习领域的研究热点[5-7]。多视图学习充分利用数据的多属性特征,互传信息,补充完善,更全面地反映目标数据的潜在特性,以获得更好的分类性能,解决了单视图学习精度低的问题。本文所使用的协同训练算法是最为经典的一种多视图学习算法。该算法可综合利用目标数据的多视图信息,在2个视图上学习获得2个不同的分类器,互换信息重新学习分类器,分类性能得到了显著提高;其中,多视图信息是指目标数据所具有的不同属性,例如,在网页分类问题中,网页可由当前的网页信息表示,亦可由指向网页的超链接信息表示,从而形成了2种不同的视图信息[5]。
Blum和Mitchell于1998年提出了协同训练算法[8]。该算法的基本原理为:假设数据集χ包含2个不同视图χ=χ1×χ2,且其相应的属性划分结果分别为子集X1、X2;其中,视图χ1、χ2必须满足2个条件:① 每个属性子集都足够训练一个高性能分类器;② 在给定类标签的情况下,属性子集之间相互独立分布,即:给定样本x=(x1,x2)∈χ1×χ2,其标签y∈Y,Y为标签集,则存在:p(x1|y)p(x2||y)=p(x1,x2|y)。
每个属性子集构成一个“视图”,满足以上条件的视图称之为“充分冗余视图”[9]。该算法首先基于2个视图上的标记数据集学习获得2个初始分类器,然后,分类器对无标记样本进行标签预测,选择出置信度较高的样本及其预测标签,并将其添加到另一个分类器对应的标记数据集中,形成其新的标记数据集,进而基于此更新2个分类器,重复执行以上过程,直至算法达到收敛效果[10];其中,置信度是指正确标记样本数据的可靠性。具体算法流程如下。

输出:分类器h=(h1,h2)。
具体步骤:
① 利用L中的标记样本训练分类器h1,h2;
② 分类器h1,h2分别对无标记数据U进行预测标记;
③ 选择置信度较高的预测样本,并添加到另一个分类器对应的标记数据集;
④ 利用更新的训练样本集X=L′∪U′,重新训练分类器;
⑤ 重复上述过程,直至收敛。

本文提出了一种基于多类协同训练的整机振动故障诊断方法,实现了对发动机故障的精准诊断,降低了因故障而造成的各种损失,如飞行事故的降低、飞机维修费的减少等,故其在航空飞行试验中具有重要的工程意义。
1 整机振动故障诊断模型
BP神经网络和支持向量机仅适用于二分类问题,而航空发动机整机振动故障诊断研究属于多分类问题,同时针对某型发动机,振动故障数据有限,故利用协同训练算法可对少量数据进行有效建模的特点,构建发动机整机振动故障诊断模型。
1.1 整机振动故障诊断模型学习
本文将整机振动故障类别表示为标记空间y={0,1,2,3},其中,“0”表示“无故障”,“1”表示“转子不对中”,“2”表示“动不平衡”,“3”表示“支承刚度过大”。整机振动故障分类器使用矩阵形式表示,即:ε=[ε0,ε1,ε2,ε3],θ=[θ0,θ1,θ2,θ3],且ε,θ∈Rd×4,其中,ε,θ表示2种不同性质的分类器,d为不同的“振动速度”数,即在不同位置不同方向上的振动速度。
1.1.1 损失函数构造
使用逻辑回归算法构造2个分类器的损失函数,如式(1)、式(2)所示。
(1)
(2)
式中,(x,y)表示故障数据x对应故障类别y;L表示带标记的整机振动故障数据集。
最小化2个分类器上的损失函数,如式(3)所示。

(3)
由于式(3)不可微,故使用归一化操作将其最大项消除,如式(4)所示。
(4)
1.1.2 属性划分
为了提高2个分类器之间的差异性,保证该算法的高分类性能,对带标记的整机振动故障数据集L所包含的“振动速度”属性进行划分,具体如式(5)所示。
(5)
式中,εi,θi分别表示2个分类器在属性i上的取值,即:“1”或“0”,“1”表示分类器包含该属性,“0”则相反。
1.1.3 最优化问题转化
为了学习2个具有较低损失值的故障分类器,结合式(4)、式(5),将其转化为带约束的最优化问题,具体如式(6)、式(7)所示。
目标函数:
(6)
约束条件:
(7)
本文应用增广拉格朗日方法[10]进行该最优化问题的求解。
1.2 整机振动故障数据的类别预测
使用已生成的2个故障分类器ε、θ分别预测整机振动故障数据x′∈U的故障模式,其中,U表示未带标记的整机振动故障数据集,具体如式(8)、式(9)所示。
(8)
(9)
式中,k=0,1,2,3分别代表4种故障模式,即:“无故障”、“转子不对中”、“动不平衡”和“支承刚度过大”;yε(x′),yθ(x′)分别为x′在分类器ε,θ上的类别预测结果;x′Tεk表示x′在分类器ε上的故障类别为“k”的概率;x′Tθk表示x′在分类器θ上的故障类别为“k”的概率。
1.3 整机振动故障分类器优化
为了提高分类器的诊断准确率,迭代优化已生成的2个故障分类器ε,θ。本文对整机振动故障数据x′的诊断可靠性进行量化评估,如式(10)、式(11)所示。
(10)
(11)

(12)

(13)

诊断可靠性评估完成之后,在2个分类器之间互传带标记的整机振动故障数据,即:基于预测可靠性大小降序排列未带标记的整机振动故障数据,选取每个分类器预测获得的前5组整机振动故障数据添加至另一个分类器对应的标记数据集,以此更新带标记的整机振动故障数据集,并基于更新后的标记数据重新训练故障分类器ε、θ,重复上述过程,直至未带标记的整机振动故障数据集为空或无可靠数据选择,以此迭代优化分类器。
1.4 仿真识别
本文基于多数投票机制识别其故障诊断结果,其计算如式(14)所示。
y(x′)=argmax{yε(x′),yθ(x′)}
(14)
2 实验
2.1 参数设置
本文选取某型航空发动机5种常见截面的水平与垂直方向作为试验测点,即为故障诊断模型学习所需的分类属性,以及4种常见的发动机故障模式(无故障、转子不对中、动不平衡、支承刚度过大)作为分类标签。在每种故障模式中选取5个特征向量,总计20个特征向量。本文随机选取每种模式中的2个特征向量作为训练数据,用于构建多类协同训练故障诊断模型,如表1所示(注:此数据均来源于沈阳航空工业学院辽宁省数字化工艺仿真与试验技术重点实验室);同时选取每种模式中剩余的3个特征向量作为测试数据,以此验证诊断模型的分类性能。
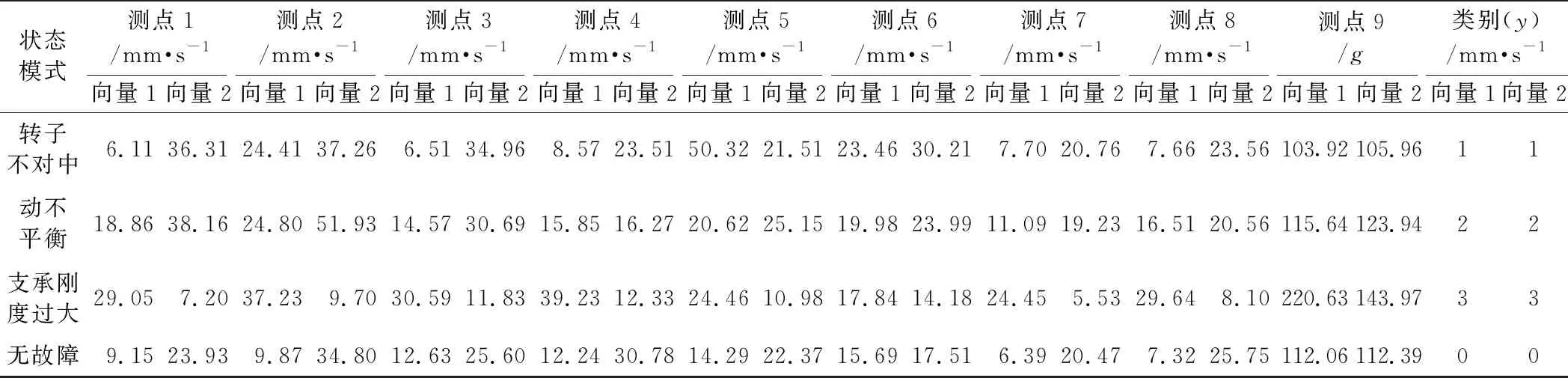
表1 某型航空发动机整机振动故障诊断训练数据[1]
2.2 模型训练和测试
基于表1所包含的8个特征向量进行故障诊断模型的训练,同时利用该数据对该模型进行仿真测试,分类准确率达到100%,实现了故障数据的精准分类。
此外,为了验证该模型在噪声条件下的模式识别能力,在输入数据上叠加一定的噪声信号,该模型诊断结果如表2所示,诊断准确率达100%。由此表明,存在噪声信号的干扰下,该模型仍具有高分类性能。
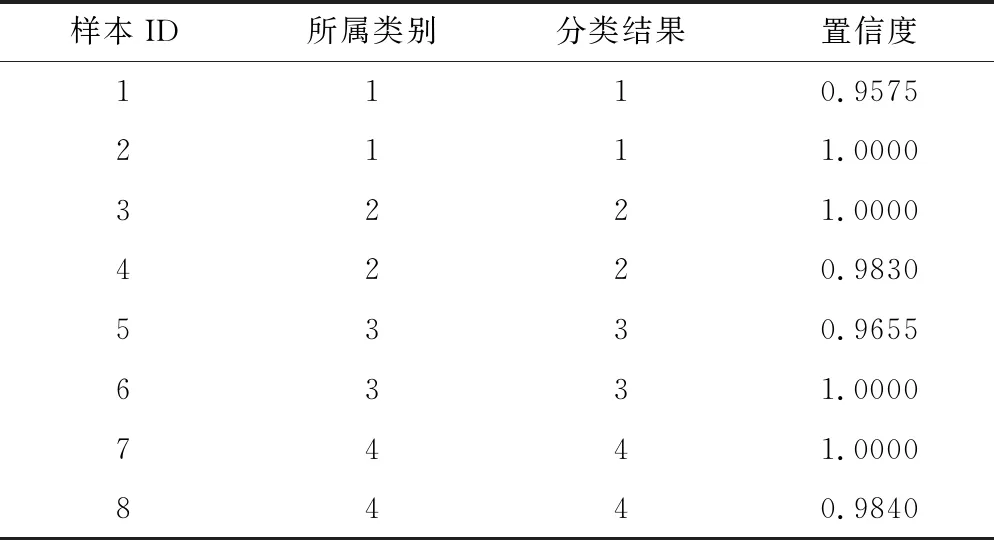
表2 噪声干扰下的诊断结果
2.3 对比算法
为了评估多类协同训练算法在不同发动机故障类型上的泛化能力,本文选取分类准确率(Accuracy)作为其评估指标,并采用BP神经网络、支持向量机(Support Vector Machine, SVM)与该算法诊断结果进行对比;其中,分类准确率越高,算法的泛化能力则越强。本文使用表1所包含的8组训练数据进行整机振动故障诊断,实验结果如表3所示。结果发现,多类协同训练算法在4种故障类型上的分类准确率均为100%,均高于BP神经网络和SVM,且BP神经网络的分类准确率达到最低(82%)。由此可得,多类协同训练算法在整机振动故障诊断上具有最强泛化能力。在表3中,多类协同训练算法用MCT表示。

表3 多类协同训练算法、SVM、BP在不同故障类型上的分类准确率
2.4 仿真识别
为了进一步验证多类协同训练算法的有效性,本文将其余12组测试数据输入至整机振动故障诊断模型,“转子不对中”、“动不平衡”、“支承刚度过大”及“无故障”等4类数据的诊断结果如表4所示。结果发现,4种故障类型的模型预测结果均与实际结果一致,这表明该模型的学习能力和泛化能力均为良好。

表4 4类数据的故障诊断结果
3 结论
相比于BP神经网络、支持向量机,协同训练算法的最大优点为它能在少量带标记数据的条件下,实现对未标记数据或实例数据的精准分类。本文对于航空发动机整机振动故障的仿真识别,利用少量的4组训练数据实现了4种故障模式的精准识别,且故障诊断模型具有较强的泛化能力以及噪声条件下的容错能力。由此证明,针对某型号飞机,因其发动机很少发生重大故障,故难以获得大量的训练数据,同时在真实场景下的整机振动数据中均存在相应强度的噪声干扰,使用多类协同训练算法对整机振动故障进行模式识别,具有非常重要的工程实用价值。