基于坐立转换运动轨迹的如厕辅助装置设计
2021-07-29李远利涂细凯胡世超李肖
李远利,涂细凯,,胡世超,李肖
1.湖北工业大学工业设计学院,湖北武汉市 430068;2.湖北工业大学机械工程学院,湖北武汉市 430068
坐立转换是生活中必不可少的动作,健康成年人每天约有(60±20)次坐立转换运动,是站立行走的必要前提[1-2]。该动作是从一个稳定的姿势转换到另一个稳定的姿势,转换过程中,需要身体各部位协调,维持身体重心平稳[3]。人口老龄化、脑卒中和脊椎损伤等导致下肢功能障碍患者急剧增加,此类人的肌肉力量只有青年的80%左右[4-7],导致他们的坐立转换难以顺利完成,所用时间明显延长[8-10];提供一定辅助可减少坐立转换困难。与人工辅助相比,辅助设备可提供更安全、稳定的辅助,减轻护理人员身体负荷[11-12]。
影响坐立转换的舒适性和平衡安全性因素较多,如压力、体质量、坐姿、运动轨迹和身体运动速度等[13-16]。刘坤等[17]通过变杆长和变杆位的线性联动设计,辅助人体从坐到站;陈筱[18]通过感性需求分析获取用户设计要素,对坐便器进行整体造型设计;Chang 等[19]基于坐立转换运动开发自适应的坐立转换辅助设备;Lee 等[20]通过分析腿部对地面反作用,研究马桶座圈高度和角度的变化。上述研究满足了一定功能设计,但还存在一些不足:应用性弱、结构复杂、使用不便[21];缺乏舒适性与平衡安全性的深入研究;偏向感性设计,产品的可靠性有待验证;功能单一,整体性能欠佳。
如厕辅助装置是坐立转换辅助设备的具体应用之一,如舒适性和平衡安全性不高,会对人体造成危害;如运动轨迹不符合人体自然坐立规律、人体与马桶座圈之间的接触压力过大,都会对使用者产生不良影响。提高如厕辅助装置舒适性和平衡安全性问题是未来的研究热点。本研究采用惯性测量单元(inertial measurement unit,IMU)Xsens DOT 姿态传感器,采集健康人坐立转换过程中髋关节运动轨迹,采用线性拟合法确定髋关节升降与躯干旋转的变化关系,获取人体坐立转换过程中的最优运动轨迹,并与现有研究的运动轨迹进行有限元仿真压力比较,优化坐立运动轨迹设计,为如厕辅助产品设计提供参考。
1 坐立转换运动轨迹
1.1 研究对象
本研究的如厕辅助装置针对下肢肌力弱化的老年人设计。但由于选择老年人进行试验存在一定危险,故选择健康受试者进行试验。
2020 年10 月至11 月,在湖北工业大学工业设计学院和机械工程学院招募健康志愿者12例,其中男性7 例,女性5 例;平均年龄26.2 岁,平均身高174.5 cm,平均体质量65.3 kg。
纳入标准:①无认知障碍;②无任何影响身体坐立障碍的疾病史;③测试前24 h内未剧烈运动。
所有受试者均了解试验过程与目的,签署知情同意书。本研究已经湖北工业大学工业设计学院伦理审查。
1.2 试验假设
简化运动模型,所有坐立转换试验均在矢状面内完成,忽略其他平面内的运动;受试者肩、头挺直,手臂自然放在大腿上保持不动,避免手臂摆动的影响;受试者穿合适的衣服,避免身体和衣服的互动对试验数据的影响。
所有受试者双脚固定在同一位置,保持平行,与肩同宽。以脚后跟为原点建立Y-Z 平面坐标系,其中Y 轴表示矢状面的竖直运动,Z 表示在矢状面的水平运动。见图1。

图1 坐立转换试验的起始姿势
1.3 方法
采用Xsens DOT 姿态传感器采集髋、膝关节数据。
首先建立人体模型,包含髋关节、大腿、小腿及脚;选用标准50百分位人体数据,将腿长、膝高和髋高调整为与实际大小一致。受试者髋关节股骨大转子和大腿重心处用绑带垂直固定Xsens DOT传感器。
符合人体工程学的马桶高度为430 mm,故用无扶手且高度为430 mm 的座椅进行坐立转换试验数据采集,固定凳脚。运动速度过慢会损害膝关节,运动速度过快会增加跌倒风险[22],故本研究采用3种速度:慢匀速坐站、中匀速坐站和快匀速坐站,以确保人体坐立转换的舒适和平稳安全。
受试者接收到“起立”口令时开始坐立运动,每种速度进行5 次坐立转换,所有动作连贯完成。在坐立转换过程中不允许出现扭头、身体倾斜、停止等不正常动作,每次的试验环境不变。采集坐立转换最佳动作下的数据。
根据运动特征,可将坐立转换分为4 个阶段。阶段1 为初始状态,身体处于自然坐姿,躯干与座面垂直,身体正直;阶段2 为准备状态,身体前倾,使重心向前接近膝关节,从而产生向上及向前的动力,主要由膝关节以上的躯干部分完成;阶段3为起立状态,身体前倾至合适位置时,下肢发力,膝以上环节绕膝关节转动,使髋关节离开座面;阶段4 为稳定站立状态,躯干基本直立,站立稳定且平衡。其中,阶段2和阶段3是坐立转换的重要阶段。
1.4 坐立转换运动轨迹
人体在自然站立时,可在低肌肉激活强度下维持身体稳定性[23]。获取自然状态下坐立转换的实时运动位置、角度数据,采用Origin 2019软件统计膝关节平均角度(θ1)、髋关节屈曲平均角度(θ2)随时间变化的曲线(图2),其 中,θ1ϵ(0 91.3°),θ2ϵ(0 83.9°)。李晋等[24]采用高清定焦相机单帧测量的结果,膝关节角度变化最大值为86.5°,髋关节角度变化的最大值为92.6°,与本研究结果相似。

图2 三种速度下髋、膝关节角度变化
采用最小二乘法[25]对受试者相同时间内,股骨大转子在矢状面上的位置平均数进行拟合,最终得到慢匀速、中匀速和快匀速状态下髋关节大转子从站到坐、从坐到站完整周期的运动轨迹(图3)。

图3 三种状态下股骨大转子的运动轨迹
2 有限元压力仿真试验
2.1 运动轨迹比较
分别将本研究采集的坐立转换运动轨迹数据与李晋等[24]采集的运动轨迹数据,进行不同倾角马桶座圈有限元仿真分析。
初始坐姿高度430 mm,本研究运动轨迹的升降高度差为350 mm,李晋等[24]运动轨迹的升降高度差为275 mm。当辅助装置的座圈沿运动轨迹到达最高位置时,座圈旋转40°,是保证人体与如厕装置分离的最佳角度[17]。如厕辅助装置在升降过程中,座圈转动角度随高度变化而变化。通过线性拟合法获得升降高度差与旋转角度的关系:
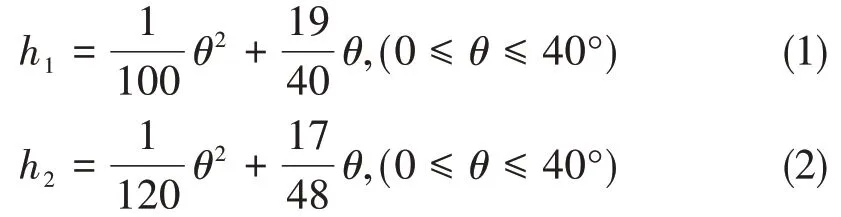
其中,式(1)采用本研究轨迹,式(2)采用李晋等[24]研究的轨迹。h为升降高度差,θ为升降时马桶座圈的转动角度。
采用线性插值法分别以0°、10°、20°、30°、40°倾角对辅助装置座圈的升降过程进行静力学分析。采用脚底压力传感器间接测量臀部在坐立转换过程中的载荷:脚底压力传感器置于地面,测试者坐在430 mm 高的椅子上,双手自然摆放,双脚踩在压力传感器上,依据h与θ的数值关系调整高度与倾斜角度,每组数据采集时间6 s;在误差允许范围内,计算升降过程中臀部与马桶座圈的接触载荷。见表1。
2.2 有限元分析设置
由于本研究模拟的仅是髋肌后群、大腿肌后群与马桶座圈的接触,故将人体模型各部位进行合理简化[26]。根据标准人体数据重构人体三维模型,并基于人体运动学坐姿进行调整,最终该模型尺寸和真实人体大致吻合。
对两组坐立转换运动轨迹的0°、10°、20°、30°、40°倾角姿态进行静力学仿真时,为在保证结果可靠性的前提下尽可能减小计算量,仅选取髋关节、大腿、小腿和足与马桶座圈[26]装配进行静力学分析。首先设置马桶座圈与人体的材料参数[26-27],臀部与马桶座圈的接触类型设置为摩擦,摩擦系数0.3;各倾角高度分别按表1 倾角度数对应的高度1 和高度2 数据,对坐姿状态进行调整,载荷数值也根据表1 的载荷1和载荷2 进行设置。图4 为0°倾角状态下的设置。由于网格质量是影响仿真精度和稳定性的重要因素[28],故整体网格大小为10 mm,在臀部与马桶座圈接触部分采用5 mm网格进一步细化。

图4 静力学分析设置

表1 两组运动轨迹的倾角与高度、足部与臀部的载荷数值
2.3 仿真结果
压力分布云图显示,在相同倾角坐姿状态时,两种运动轨迹下的马桶座圈压力分布趋势基本相同,最大压力都位于髋肌后群臀大肌突出部位。压力的分布和大小影响舒适性[29-32],压力越大,疲劳感越大,舒适性越低;反之则会提升舒适性。在0°、10°、20°、30°、40°坐姿时,基于本研究运动轨迹的最大压力均小于李晋等[24]研究的运动轨迹,提示本研究采用的坐立转换运动轨迹更舒适(图5)。

图5 两种轨迹各倾角平均压强比较
2.4 平衡性分析
Hof 等[33]将站立平衡分为静态平衡和动态平衡,并得出满足两种平衡情况的条件。测量受试者的身高、体质量、胸围、腰围、臀围、大腿和小腿长7 项数据,取平均值,采用回归分析法得到质心到踝关节的距离,将人体简化为3 旋转自由度的杆组结构(图6),其中l1,l2,l3分别为小腿长、大腿长、质心到髋关节的距离。

图6 人体简化模型图
在MATLAB 中进行坐立转换运动仿真,得到质心在空间中的运动轨迹以及在水平面的投影。测量受试者压力中心范围:前后5~37 cm,左右-9.3~8.6 cm。质心运动轨迹在水平面内的投影完全在压力中心范围内(图7)。

图7 质心运动轨迹与压力中心范围的位置关系
需要注意的是,本研究涉及的坐立转换平衡问题与Hof 等[33]研究的站立平衡存在差异。由于老年人在借助装置进行辅助坐立转换时,站立阶段速度几乎为零(可通过控制系统完成)[34],故老年人完成坐立转换后的平衡问题可作为静态平衡处理。双足与地面的接触作用力区域定义为压力中心范围[33],在静态平衡情况下,质心的垂直投影一定落在压力中心范围内。MATLAB仿真结果近似符合静态平衡,按此坐立运动轨迹设计辅助装置是可行的。
3 如厕辅助装置总体设计
3.1 结构设计
辅助坐立产品大多仅以膝盖为支点,减轻上肢躯干对下肢的负荷,以达到功能目的[35]。但坐立转换过程中最关键的环节,要依靠小腿和大腿肌力实现,且支撑力主要源于大腿。由于老年人肌肉功能下降,如厕坐立过程困难。对此,参照图3 运动轨迹参数设计一种如厕辅助装置,结构如图8。

图8 如厕辅助装置示意图
装置两侧对称安装两个电动推杆,当推杆处于初始位置时,马桶座圈为水平位置;设计可调节的靠背和扶手,以保证用户的平衡安全性和舒适性;创新马桶座圈造型,增加与人体的接触面积,以降低对肌肉的压迫,这是很多如厕装置研究所欠缺的[17-18]。连杆组件可以实现间歇回转运动,避免传动结构过于复杂。
原理见图9。OA为电动推杆,AH为马桶座圈,CD表示下转动连杆,BE为上转动连杆,BC为升降连杆,DE为支架,且AH⊥BC。P(x,y)为如厕时臀部与座圈的接触点。电动推杆的倾角为δ0,长度为l0(变杆长),对应的下连杆、升降连杆、上连杆的状态角分别 为δ1,δ2,δ3,长度分别为l1,l2,l3,座圈的升角为δ4(δ4=θ),δ4ϵ[0 40]°。按照标准人体数据库,上下连杆与支架铰接点之间的距离l4=120 mm;δ4=0°时,AH=l;考虑个体差异,lϵ[570 660]mm;设AP/AH=k,根据实测值,kϵ[0.54 0.72]。则该时刻有

图9 连杆组件的设计

其中l0的极限长度为1200 mm,δ4的范围决定了δ0ϵ[59.4 67.3]°,δ2ϵ[50 90]°,yD,yE按照人体自然坐姿时小腿长度和经验取值;为满足如厕辅助装置设计的舒适性和适用性,取l=620 mm,k=0.65;当δ4取值确定时,δ0和l0可随之确定,进而算得xP;将xP与试验测得的运动轨迹曲线进行对比确定yP;再以l2作为设计变量,用迭代法设计l1,l3。最终得到辅助装置的主要零部件尺寸如表2。产品效果见图10。

图10 如厕辅助装置效果图
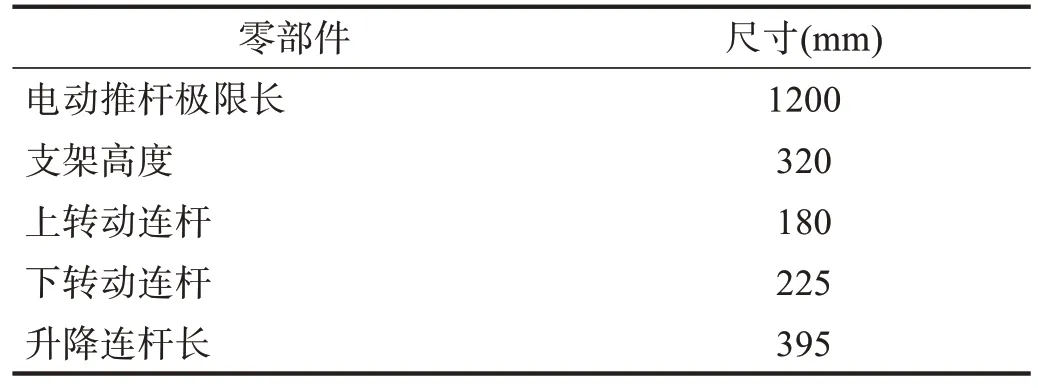
表2 如厕辅助装置主要零部件尺寸
3.2 满意度测试
另邀请年龄20~60 岁的健康人20 例体验如厕辅助装置。采用Likert 5 级法进行满意度评估,非常不满意为1,不满意为2,不确定为3,满意为4,非常满意为5。
采用本装置进行坐立转换时,轨迹接近人体自然运动规律(图11),可自然顺畅完成坐立转换动作;体验者无前倾趋势;装置整体简捷,其中座圈、手臂托和把手舒适度良好。各项满意度平均分:易站4.30分,安全4.05 分,协调4.25 分,简捷3.75 分,舒适4.20分,平稳4.00分,美观3.05分,专业3.35分。

图11 如厕辅助装置升降运动轨迹
4 小结
本文基于坐立转换试验,获得最优运动轨迹,据此设计如厕辅助装置。本研究获得的坐立转换运动轨迹更舒适、合理,利于用户辅助坐立转换。对如厕辅助装置进行参数化结构设计和验证,产品满意度符合预期,当马桶座圈倾角为40°时,人体刚好位于初始坐姿装置的前上方,坐立过程完全符合人机工学。
本研究由于试验设备的局限性,暂时不能分析膝、髋和大腿处在坐立转换过程中的载荷变化,有待今后进一步研究。
利益冲突声明:所有作者声明不存在利益冲突。