基于在环仿真的自动紧急制动系统测试方法
2021-07-29王启配刘全周李占旗
王启配,刘全周,李占旗
(中汽研(天津)汽车工程研究院有限公司 天津 300300)
0 引 言
交通事故统计结果显示,大量的交通事故造成死亡和重伤案例是发生在汽车与易受伤害的道路使用者如行人或骑车人之间,近几年中国交通事故死亡数据分布如图1所示,超过90%以上的这类交通事故造成了严重的人身伤害。正是基于此汽车制造商和系统供应商正在努力开发面向主动安全的先进驾驶辅助系统(ADAS),可以避免或减轻这种撞击所造成的伤害。其中,自动紧急制动系统(AEB)装车率越来越高,AEB作为一种汽车主动安全技术,通过实时检测本车辆前方的运行环境,在将要发生碰撞危险时自动启动车辆制动系统,使车辆主动降扭减速,辅助驾驶员规避发生碰撞或减轻碰撞后果。

图1 近几年中国交通事故统计数据图Fig.1 Statistics of traffic accidents in China in recent years
为更好地监控市场车辆配置的自动紧急制动系统产品性能,自动紧急制动系统标准法规陆续出台,其中包括交通运输部JTT 1242—2019《营运车辆自动紧急制动系统性能要求和测试规程》、国标GB/T 38186—2019 《商用车辆自动紧急制动系统(AEBS)性能要求及试验方法》以及2018年《乘用车自动紧急制动系统(AEBS)性能要求及试验方法》征求意见稿、2018年《C-NCAP管理规程》、2020年《CCRT(智能电动汽车)管理规则》等,都对自动紧急制动系统的性能、场景工况提出了明确要求。
自动紧急制动系统全称Autonomous Emergency Braking,简称AEB,其功能越来越普及,但是市场上的表现效果却良莠不齐。如何快速迭代验证AEB功能准确性、鲁棒性是当前车企、系统供应商面临的主要问题。本文从硬件在环仿真测试验证角度出发,系统介绍本技术方案的工作原理、系统平台构建方法、测试验证方法等。
1 HIL系统工作原理及应用研究
自动驾驶硬件在环仿真测试方法相较实车测试,在测试成本、测试效率、工况可重复性、危险极限工况模拟、测试场景数量等方面有着不可比拟的技术优势,可有效加速自动驾驶测试,Zhao[1]提出了自动驾驶汽车的测试加速理论,通过应用重要性抽样方法,提高危险场景发生概率,相同的测试里程下在仿真环境中模拟更多的危险场景,理想条件下可以缩短测试里程千倍以上。
硬件在环仿真测试系统基于实时处理器运行车辆动力学仿真模型来模拟受控对象的运行状态,同时通过机柜 I/O接口与被测电控单元行车电脑(ECU)连接,即分别为电控单元ECU提供车辆运行环境和电气环境,从而对被测电控单元ECU进行全方面的、系统的测试,硬件在环仿真测试已广泛应用至统动力、底盘、新能源、车身等领域。如王剑飞等[2]研究了电子驻车制动系统(EPB)控制器功能仿真测试;刘全周等[3]基于硬件在环仿真研究了双离合变速(DCT)控制器的控制策略、诊断策略以及网络交互式功能策略测试验证方法;晏江华等[4]以一款纯电动汽车的整车控制系统(VCU)为测试对象,通过建立整车闭环系统模型,基于dSPACE仿真测试平台搭建测试环境,对VCU控制器进行通信测试验证;田涌军等[5]采用Lab VIEW开发,完成对车身电子模块的自动化测试;陈慧鹏[6]通过对信号级、总成级方法进行HIL仿真测试;辛迪宇[7]搭建了发动机控制单元硬件在环测试平台,分别对发动机仿真模型验证、传感器信号测试验证、执行器信号测试验证、总线协议(CAN)通信信号测试验证及开关类信号测试验证;黄淼[8]通过集成驾驶模拟器,开发了新模式的车身稳定控制系统(ESC)硬件在环仿真测试系统,对ESC功能进行测试评价。
自动驾驶硬件在环仿真测试验证方面,刘全周等[9]描述了基于摄像头暗箱对车道偏离系统(LDW)的功能测试验证;栾铭湧等[10]、罗传东等[11]的多篇论文研究聚焦在针对智能摄像头的硬件在环仿真测试方案中应用,而基于前向智能摄像头主要用于实现LDW、车道保持辅助系统(LKA)、交通智能识别系统(TSR)功能,由于自动紧急制动系统对目标距离、速度要求高,结合不同类型传感器差异性特点,自动紧急制动系统基本是借助毫米波雷达传感器实现目标探测,然而目前并无类似文章阐述雷达台架HIL测试方案。如何针对基于毫米波雷达传感开发的自动紧急制动系统进行测试验证,是本文主要研究目的。
2 AEB系统工作原理
AEB是指车辆在非自适应巡航的情况下正常行驶,如车辆遇到突发危险情况或与前车及行人距离小于安全距离时车辆主动进行刹车(但具备这种功能的车辆并不一定能够将车辆完全刹停)避免或减少追尾等碰撞事故的发生,从而提高行车安全性的一种技术[12]。当系统计算出会有碰撞可能时,首先会通过声音、图像等警示驾驶员,若驾驶员没能对预警起到正确反应,再轻微震动制动踏板或方向盘来二次预警,过程中提前填充制动油压,以便制动作用时能快速准确的完成。AEB电控单元作为请求部件,通常将制动减速度、降扭请求值发送给EMS、ESP执行单元响应,从而实现车辆减速刹停,如图2。AEB系统逻辑工作状态如图3所示。

图2 AEB系统工作流程图Fig.2 Work flow of AEB system

图3 AEB系统逻辑状态示意图Fig.3 Logic state diagram of AEB system
3 AEB HIL系统平台搭建
AEB系统硬件在环仿真测试系统由HIL机柜、毫米波雷达模拟器台架、车辆动力学模型、交通场景模型、测试管理软件组成,本次使用的HIL仿真测试系统软硬件部分均来自dSPACE,从而保证系统兼容性好、实时性强的特点。文本通过模拟雷达回波的方法验证集成感知与控制一体的ECU电控单元,参见图4。

图4 毫米波雷达仿真器示意图Fig.4 Schematic diagram of millimeter wave radar simulator
本文所述AEB电控单元主要功能点包括AEB功能开启条件检测、前方目标探测、预填充功能、液压助力辅助、制动辅助、AEB功能抑制、紧急制动、功能降级、AEB系统人机交互等。
自动紧急制动系统硬件在环仿真测试系统的架构如图5所示。系统工作原理主要分为车辆模型、交通场景模型运行在HIL实时系统中,通过HIL机柜CAN仿真板卡与被测控制器通信,残余总线仿真车载信号,比如车速、发动机转速等。基于ASM的整车模型架构如图6所示。
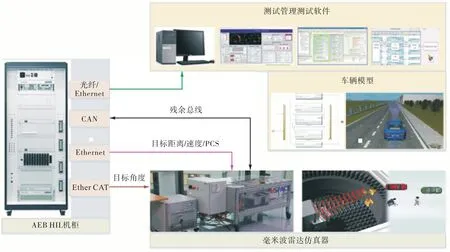
图5 AEB HIL系统架构图Fig.5 AEB HIL system architecture
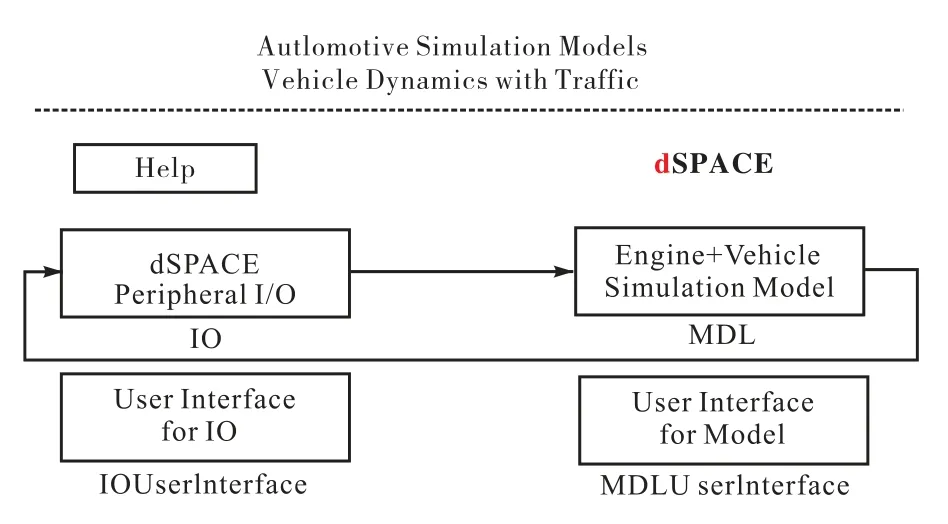
图6 基于ASM的整车模型架构图Fig.6 ASM vehicle model architecture
4 AEB仿真测试验证方法
如何有效测试验证智能驾驶电控单元功能准确性、鲁棒性、功能完备性是当前业内面临的关键挑战,本文提出的基于硬件在环仿真测试解决方案提供了一种迎接挑战的方法,通过仿真手段提出了基于多源场景数据的测试验证方法,实现对智能驾驶ECU功能测试验证。
智能驾驶车测试验证相对传统车电控单元测试的差异性特点主要在于自动驾驶面临着无穷限种类的交通场景,为全面对自动驾驶车辆进行功能验证需要基于广泛的道路里程进行测试[15]。本文结合多个项目案例从测试场景实际需求出发,梳理基于多源场景数据源的智能驾驶仿真测试验证方法。
交通场景数据源包括标准法规、功能定义、自然驾驶、交通事故、项目经验5个,结合这5个数据源开发设计面向自动驾驶仿真测试需求的场景,场景设计路线参考图7。

图7 交通场景开发技术路线Fig.7 Technical route of traffic scenario development
进一步阐述本文设计场景的技术路线。首先对ADAS功能项进行分析,确认功能项后对其功能点分解,针对功能点定义功能作用域,基于作用域设计场景元素,场景元素根据重要度组合方法设计场景,设计场景时根据多源场景数据赋值,从而将设计的场景应用至自动驾驶控制器测试验证。基于dSPACE Motiondesk软件开发虚拟场景,如图8—图11。

图8 交通事故场景模拟示意图Fig.8 Simulation of traffic accident scenario

图9 自然驾驶场景模拟示意图Fig.9 Simulation of natural driving scenario

图10 基于C-NCAP开发AEB CCRb前车刹车仿真场景Fig.10 AEB CCRb scenario based on C-NCAP

图11 基于C-NCAP开发AEB CCRs前车静止仿真场景Fig.11 AEB CCRs scenario based on C-NCAP
5 AEB HIL仿真试验
结合某车型AEB系统,对其进行法规试验仿真测试,提炼C-NCAP规定的AEB场景测试要求,在虚拟仿真软件中搭建测试场景,验证AEB系统工作的有效性、准确性。本次设计场景主要包括AEB CCR测试场景,其中主要包括3种试验:CCRb,CCRm,CCRs,以不发生碰撞作为测试评价依据。本次CCR试验场景参数设置如表1。

表1 CCR场景设计Tab.1 CCR scenario design
5.1 AEB CCBb场景仿真验证
两车初始相对距离40 m,两车初始车速均为50 km/h行驶,前车以4 m/s2减速,结果如图12。

图12 AEB CCRb法规试验Fig.12 AEB CCRb regulation test
5.2 AEB CCBm场景仿真验证
两车初始相对距离150 m,本车速45 km/h行驶,前车匀速20 km/h行驶,结果显示如图13。
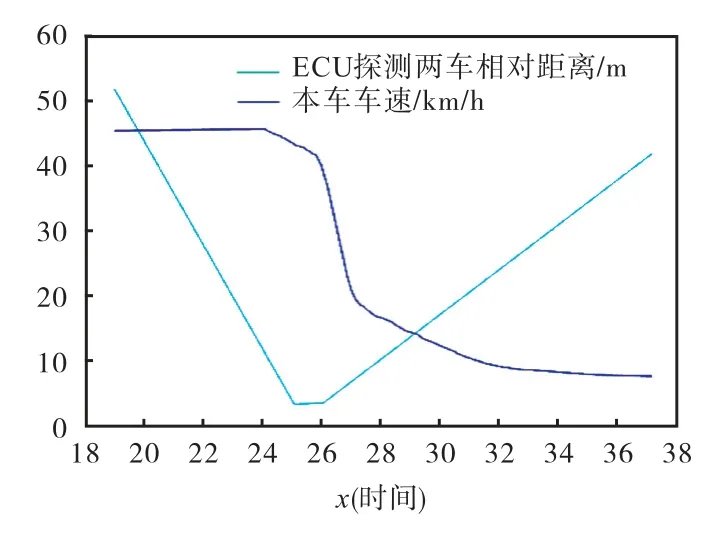
图13 AEB CCBm法规试验Fig.13 AEB CCBm regulation test
5.3 AEB CCBs场景仿真验证
两车初始相对距离150 m,本车速40 km/h行驶,前车静止。由于前方是静止目标物,而本次测试毫米波雷达传感器是不识别静止物体的,所以本车距离前方车辆很近时,本车也没有减速,本车直接与目标车相撞,通过本次试验确认了本款雷达传感器对静止目标物体不起作用。
6 结 论
本文介绍了汽车电控系统硬件在环仿真工作原理,基于dSPACE 软硬件平台搭建AEB HIL系统,主要考虑基于多源交通场景对自动驾驶系统进行仿真测试,最后通过设计C-NCAP AEB CCR场景,借助HIL仿真平台对AEB电控系统测试验证,结果表明基于硬件在环仿真平台可有效对AEB系统功能进行验证,通过量化数据分析不仅实现对AEB功能定性测试且支持定量分析,从而验证AEB功能准确性。本方案在实验室环境下对ADAS控制器进行功能测试,仅通过法规场景为例对AEB系统功能仿真验证说明,下一步重点工作将会利用多源场景数据验证ADAS功能鲁棒性,同时结合故障仿真等手段验证ADAS功能完备性,最终实现在仿真环境下加速自动驾驶测试的目的。■